
机器视觉核桃分级中相机可变视场与像素转换系数自动获取方法
2016-12-01 10:26史建新
安徽农业科学 2016年29期
郭 政,周 军,史建新,蔡 建
(新疆农业大学机械交通学院,新疆乌鲁木齐 830052)
机器视觉核桃分级中相机可变视场与像素转换系数自动获取方法
郭 政,周 军*,史建新,蔡 建
(新疆农业大学机械交通学院,新疆乌鲁木齐 830052)
针对利用机器视觉进行农产品无损检测中相机视场调节困难以及调整后需要重新标定的问题,提出一种基于MFC软件界面控制的大恒定焦USB 2.0工业相机视场自动调节方法,并通过试验对相机进行标定,拟合出相机高度和像素转换系数的关系式,当相机视场发生变化时,系统中超声波测高模块可以实时给出相机高度,程序根据关系式实时给出对应高度的像素转换系数,方便图像处理软件根据核桃轮廓像素数据换算出核桃尺寸,精确判断等级。
机器视觉;相机视场;像素转换系数;系统标定
在农场品无损检测研究中机器视觉占据重要地位,而工业相机性能无疑是实现整个系统功能的一个关键环节。提高工业相机灵活性,增加其利用率对整合视觉系统性能具有重要意义。周竹等[1]在马铃薯机器视觉自动检测中利用双平面镜对同一对象同时获取3张图片,提高了一个工业相机的采图利用率。应义斌等[2]在对水果高速运动下无损检测中,利用多个触发传感器和输送轨道联合作用,保证相机位置不变情况下,实现对同一个水果采集多帧图片。针对利用机器视觉进行农产品无损检测中相机视场调节困难以及调整后需要重新标定的问题,笔者以工业相机采集视场为研究内容提出一种基于MFC软件界面控制的大恒定焦USB 2.0工业相机视场自动调节方法,以期实现图像采集对象发生特征变化或整个视觉系统功能调整时(如系统检测对象从外形尺寸到纹理特征的调整)可自动调节工业相机的视场属性,从而提高工业相机的利用率和使用便捷性。
1 理论方案分析
目前在农产品无损检测应用中,大部分机器视觉硬件系统都是固定相机位置,根据特定的检测对象让相机进行单一图像采集工作。当检测对象发生变化时(如检测对象的外形尺寸由大变小),固定机位的机器视觉系统图像处理软件未必可以对图像进行正确处理,同时在机器视觉系统调校中,需人工改变相机高度,给操作人员带来不便。该研究对象是基于机器视觉的核桃大小分级,当需要提高检测精度时,需对同一个核桃进行多次拍照处理(或单一核桃坏壳检测),由于核桃在生产线上处于快速运动状态,若要准确采集到固定数量的图像,系统则需对检测对象进行大视场拍照(或缩小视场,放大倍率拍照),针对此问题有以下几种解决方法:①采用变焦镜头。但其成本太高,且一般变焦镜头在变焦时最大光圈值(f)会发生改变,从而引起图像采集参数变化,且同等价位的变焦镜头成像质量不如定焦镜头[3];②将检测对象做靠近相机移动。由于被检测对象多位于机械装置(如输送皮带或输送链条)上,移动机械装置较难实现;③动态改变相机位置。该方法可根据需要调节高度,改变相机的视场,检测对象不发生位置改变。
根据以上分析可知,机器视觉系统中可调相机视场具有较多优势,而基于可视化界面的自动视场调节则会带来更多便利。方案③可以在较低成本下实现相机视场自动调节,合理可行。
2 可变视场调节
2.1 可变视场中的成像关系 大视场光学系统应用广泛,对于固定的硬件设备可提高光学仪器的工作效率,增加获取的图像信息量[4]。根据光学中高斯成像公式:
(1)
式中,u为物距;v为像距;f为相机焦距[5]。对于可变焦相机,当u不变、f增大时,v变大,结果表现为拍摄物体被拉近(放大),可视角度变小;f减小时,v变小,结果表现为拍摄物体被推远(缩小),可视角度变大。图1为可变焦相机在焦距改变时带来的视场变化。

图1 变焦相机焦距与视场的关系Fig.1 Relationship between focal length and field of view of camera
对于机器视觉系统中大部分应用的定焦镜头,f为相机固定参数。要想在固定机位,即不改变u的情况下获得较大或较小的视场角度是不可能的。因此,只有通过改变物距才可以实现。
2.2 可变视场调节的实现方法 该研究采用的硬件设备为大恒8 mm定焦USB 2.0工业相机。将此款相机安装于步进电机滑轨上,由于步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,配合上32细分的驱动控制器,可以精确控制移动高度[6]。通信方式采用USB串口向以8951单片机为下位机的控制板传递电机控制信号。自动调节系统如图2所示。
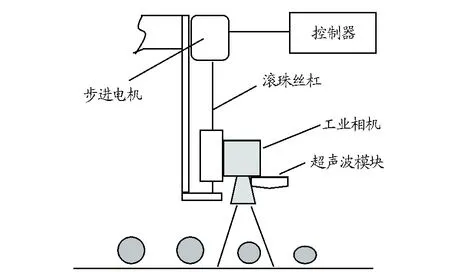
图2 自动调节系统示意Fig.2 Schematic diagram of automatic regulatory system
在相机上下移动的同时,超声波测距模块会实时将相机高度(即u)计算出来,显示到控制界面上,通过标定后,该高度值将作为重要参数计算像素转换系数。相机自动调整控制界面如图3所示。

图3 自动调节控制界面Fig.3 Interface of automatic adjustment control
点击视场变大按钮,相机将做远离拍摄主体运动,点击视场减小按钮,相机将做靠近拍摄主体运动。
3 相机标定
相机成像的数学模型决定了空间物体表面某点在世界坐标系中的位置与其在图像坐标系中对应点之间的相互关系,通过试验与计算得到这些模型参数的过程就称为相机标定。相机标定问题是机器视觉测量应用中首先需要解决的问题[7]。
3.1 传统相机标定法 该研究的目的是在核桃在线分级中建立合理的相机标定模型。当相机视场改变时可通过软件计算,自动对改变高度后的相机进行标定。此次相机标定采用小孔成像原理,标定方法采用传统标定法[8],该方法需要使用尺寸已知的标定物,通过标定物上坐标已知点组成的长度与其图像点之间进行对应,利用三角相似原理获得相机内部参数。针孔成像原理如图4所示[9]。

图4 针孔成像模型Fig.4 Pin-hole imaging model
根据针孔成像原理得到:
(2)
对公式进行变形,并且令像素转换系数为k,则公式(2)变为:
(3)
当u变化时,由于拍摄主体位置发生变化,为了清晰对焦,v会遵从凸透镜成像原理,在2倍焦距外发生微小偏移,将成像最清晰的点承接至图像平面上。由公式(1)可知,当物距增加,像距向靠近透镜方向偏移,相反,则向远离透镜方向偏移,这解决了u和v在相机高度变化中的关系问题,即为相机进行了标定。
3.2 进行试验标定 由于拍摄主体对象处于镜头正下方,镜头畸变小,且要求精度不是很高,所以此次标定没有采用象棋盘标定模板,而是改为已知尺寸的核桃进行标定。标定时对同一高度单个核桃进行5次测量,每个高度对应的像素值取5次测量的平均值。高度样本为7个,高度区间为Hmin=18 cm,Hmax=28 cm。通过测量后给出原始拍摄图片和处理后像素图片,前后对照如图5所示。
得到处理图片后,由图像处理软件给出每个核桃对应高度的轮廓像素数据,并由每个核桃的实际尺寸和轮廓像素换算出不同高度的转换系数ki(i=1,2,…,7)。根据ki值和标定的相机高度建立图表关系,并进行曲线拟合。由“3.1”分析可知,曲线大致为线性关系。图6反映了标定后像素转换系数和相机高度的关系。
4 转换系数自动获取
从转换系数和相机高度的拟合关系中得到:
k=y=0.006 0x-0.015 4
(4)
当需要相机调整时,操作人员只需根据实际情况长按图3中对应的按钮,步进电机动作时间与按钮按下时间同步,松开鼠标按键,动作停止。只要步进电机转动,x值就会发生改变,同时下位机控制板IO口接收到超声波模块返回的相机高度值[10],处理器随即根据此关系式进行换算,并将换算后的像素转换系数以USB串口通信的方式反馈到交互式软件界面[11]。

图5 原始图片和处理图片Fig.5 Original images and treatment images
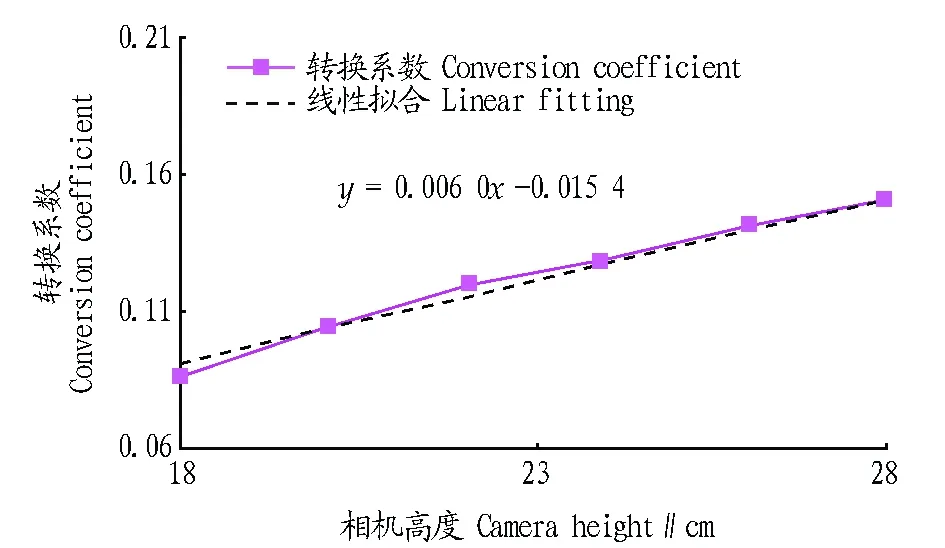
图6 转换系数和相机高度关系Fig.6 Relationship between conversion coefficient and camera height
图像处理程序在对图像(in)进行轮廓提取后,得到轮廓数据的像素值(pn),通过调用上述转换系数值,得到:
ln=k×pn
(5)
式中,ln为系数转化后的核桃尺寸。在核桃分级控制软件界面有输入等级尺寸的交互编辑框。由人工界定的某一品种核桃的不同等级尺寸,可输入程序,让ln与之判断比较,从而精确给出核桃大小等级,最后由控制软件将等级判断结果送入下位机控制机构,下位机控制对应的不同等级的气动电磁阀动作,实现精准分级。
5 结论
(1)采用基于MFC界面交互的方式实现了机器视觉中相机视场的自动调节。利用步进电机驱动相机可直线往复运动,同时超声波测高模块实时测量相机位置,精确反映高度,实现相机视场的拉近和远离。
(2)为获得相机拍摄图像的实际二维空间尺寸,对工业相机进行了试验标定,分析了实物坐标和图像坐标之间的关系后计算出像素转换系数,并将其与相机高度之间的关系进行了线性拟合。通过测高模块给出的高度计算得出对应的像素转换系数可方便控制软件对核桃外形尺寸进行分级判断。
[1] 周竹,黄懿,李小昱,等.基于机器视觉的马铃薯自动分级方法[J].农业工程学报,2012,28(7):178-183.
[2] 应义斌,饶秀勤,黄永林,等.运动水果图像的实时采集方法与系统研究[J].农业机械学报,2004,35(3):179-182.
[3] 温同强.变焦距光学系统的研究与设计[D].镇江:江苏大学,2009.
[4] 钟兴,张元,金光.大视场光学系统像面照度均匀性优化[J].光学学报,2012,32(3):41-45.
[5] 王琦,王光宇,程雪岷,等.变焦距镜头高斯光学设计的新方法[J].光学学报,2002,22(8):983-989.
[6] 刘宝志.步进电机的精确控制方法研究[D].济南:山东大学,2010.
[7] GARY BRADSKI,ADRIAN KAEHLER.学习OpenCV(中文版)[M].于仕琪,刘瑞祯,译.北京:清华大学出版社,2015.
[8] 王靖韬,侯振杰.传统相机标定方式的自动标定方法[J].计算机工程与应用,2010,46(35):205-208.
[9] 刘雪超.基于数字图像处理的自动调焦技术研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2014.
[10] 沈燕,高晓蓉,孙增友,等.基于单片机的超声波测距仪设计[J].现代电子技术,2012,35(7):126-130.
[11] 章辉,叶建芳,叶建威.基于MSComm控件串口通信的实现[J].电子测量技术,2011,34(8):126-129.
科技论文写作规范——标点符号 标点符号按照1990年国家语言文字工作委员会等公布的《标点符号的用法》执行,每个标点占一格(破折号占两格)。外文中的标点符号按照外文的规范和习惯。外文字母、阿拉伯数字、百分号等并列时,其间用“,”,不用顿号“、”。注意破折号“——”、范围号“—”和连字符“-”的不同用法。破折号又称两字线或双连划,占两个字身位置;范围号又称一字线或全身划,占一个字身位置,连字符又称半字线或对开划,占半个字身位置。破折号可作文中的补充性说明(如注释、插入语等),或用于公式或图表的说明文字中。范围号用于表示从某某到某某。例如20—30℃,70%—90%,1949—1986年(本刊文中范围号写成“~”,参考文献范围号用“-”。连字符用于连接词组,或用于连接化合物名称与其前面的符号或位序,或用于公式、表格、插图、插题、型号、样本等的编号。外文中的破折号(Dash)的字身与m宽,俗称m Dash,其用法与中文中的破折号相当。外文的连接符俗称哈芬(hyphen)。其中,对开哈芬的字身为m字身的一半,相当于中文中范围号的用法;三开哈芬的字身为m字母的1/3,相当于中文中的连字符的用法。
Variable View of Camera and Pixel Conversion Coefficient Getting Automatically in Machine Vision for Walnut Grading
GUO Zheng, ZHOU Jun*, SHI Jian-xin et al
(College of Mechanical and Traffic College, Xinjiang Agricultural University, Urumqi, Xinjiang 830052)
For machine vision post-agricultural non-destructive testing in the field of view camera adjustments are difficult and require re-calibration adjustment problems, this paper presented a constant USB 2.0 industrial camera of Daheng-Image company field of view of MFC software interface to control automatic adjustment method. And through experiments to calibrate the camera, the camera fitted the equation between height and pixel conversion coefficient. When the camera field of view changed, ultrasound height measurement module in the system could give corresponding camera height. According to the equation, the program gave pixel conversion coefficient of corresponding height, which was convenient to image processing software. Walnut size was calculated according to the pixel count of walnut contour, so that the grade was accurately judged.
Machine vision; Camera view; Pixel conversion coefficient; System calibration
“十二五”国家科技支撑计划项目(2011BAD27B02-05-02);新疆维吾尔自治区科技成果转化项目(201130102-4)。
郭政(1990-),男,江苏宿迁人,硕士研究生,研究方向:农业机械工程。*通讯作者,讲师,从事农业机械研究。
2016-08-19
S 22
A
0517-6611(2016)29-0234-03
猜你喜欢
今日农业(2021年19期)2021-11-27
中国光学(2021年6期)2021-11-25
中国医疗设备(2019年1期)2019-01-15
基层中医药(2018年2期)2018-05-31
中国惯性技术学报(2017年1期)2017-06-09
陕西画报(2016年1期)2016-12-01
光学精密工程(2016年3期)2016-11-07
激光与红外(2015年10期)2015-03-23
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
现代营销·经营版(2013年5期)2013-05-14
