
超声波传感器阵列式人数自动检测系统设计
2016-12-01 08:04董海棠马殷元
自动化仪表 2016年1期
董海棠 马殷元
(兰州交通大学机电工程学院,甘肃 兰州 730070)
超声波传感器阵列式人数自动检测系统设计
董海棠 马殷元
(兰州交通大学机电工程学院,甘肃 兰州 730070)
针对当前公交车站候车人数、电梯候梯人数自动检测困难,已有系统检测误差大、设备复杂的现状,设计了一种基于超声波传感器阵列的人数自动检测系统。系统以STC89C52作为核心控制器,运用超声波的测距原理。超声波传感器按照蜂窝状排列在人群上方,利用微处理器控制多组超声波传感器分别测距,最后综合计算超声波传感器阵列测量的距离数据,得到区域内的人数。系统可为公交车调度、电梯调度系统提供人群数量,为实现自动调度或统计提供支持。
超声波传感器 超声波阵列 人数自动检测 微处理器 测距
0 引言
随着现代社会信息化的迅速发展,公共场所人数自动识别在交通运输、商场、公共安全等领域有着非常重要的实用价值和广阔的发展前景[1-2]。通过对某区域内的人数进行统计,可以方便地分配调度资源,实现资源的高效利用。例如,高层建筑内电梯外等候乘坐电梯人数的检测,根据候梯人数的不同及时改变电梯的调度策略。统计公交车站候车人数,调整工作车辆的数量及监测交通状况。公交车等交通工具内人数的统计及某固定区域内进入和离开此区域人数情况的检测。
目前,人群人数检测系统主要有:采用图像识别原理的人数检测系统、采用红外人体感应器的检测系统、采用光电开关检测方式的系统。图像识别的人数检测系统通过选取大量包含人体特征的图片,利用图像处理分选器分析样本,从而检测固定区域图像中的人数[3],这种系统检测速度相对较低、检测设备复杂。红外人体感应器检测系统受环境影响明显,误差较大。采用光电开关式检测方式的系统,因人群的重叠、检测面积小等局限,检测误差也较大。
超声波在空气中传播不容易受到周围环境干扰,并且衰减速度缓慢,传播距离远,还具有容易实现、成本低、可靠性好的优势。目前,超声波传感器阵列广泛地应用于定位障碍物,车辆防撞系统和机器人躲避障碍物系统等方面[4-6]。
这些系统不具有测量人数功能,其结构、测量原理、安装方式均与本系统不同。
1 系统总体设计
超声波传感器阵列式人数自动检测系统基于超声波测距原理。
系统总体结构框图如图1所示。系统主要由微处理器、电源模块、输出通信接口模块、输出数字量接口模块、键盘模块、显示驱动模块、显示模块、超声波信号放大电路模块、超声波发送器阵列组、超声波接收器阵列组、超声波信号接收切换阵列、超声波接收信号处理电路阵列组成。
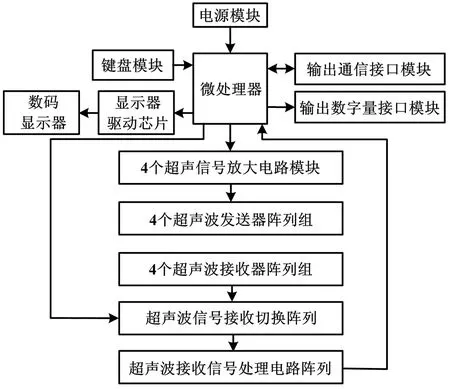
图1 系统总体结构框图
2 系统工作原理
超声波发送器阵列组和超声波接收器阵列组安装在人群上方的区域,超声波发送器阵列组和所述超声波接收器阵列组到人群所在区域支撑平面的距离为2~5 m。把人群上方的区域均按照蜂窝状六边形划分,六边形区域的中心安装超声波发送器和超声波接收器,且两个超声波发送器之间和两个超声波接收器之间的间距均为200~400 mm。选择发散角度较小的超声波传感器,传感器距离地面越高,越需要拉大传感器之间的距离。
蜂窝状六边形划分的示意图如图2所示。图2中,按照排列对每个六边形进行了编号。按照行列编号,超声波传感器阵列分为4组:奇数行奇数列组、偶数行偶数列组、奇数行偶数列组、偶数行奇数列组。系统选用40 kHz或50 kHz或60 kHz或70 kHz的超声波接收器和超声波发送器。
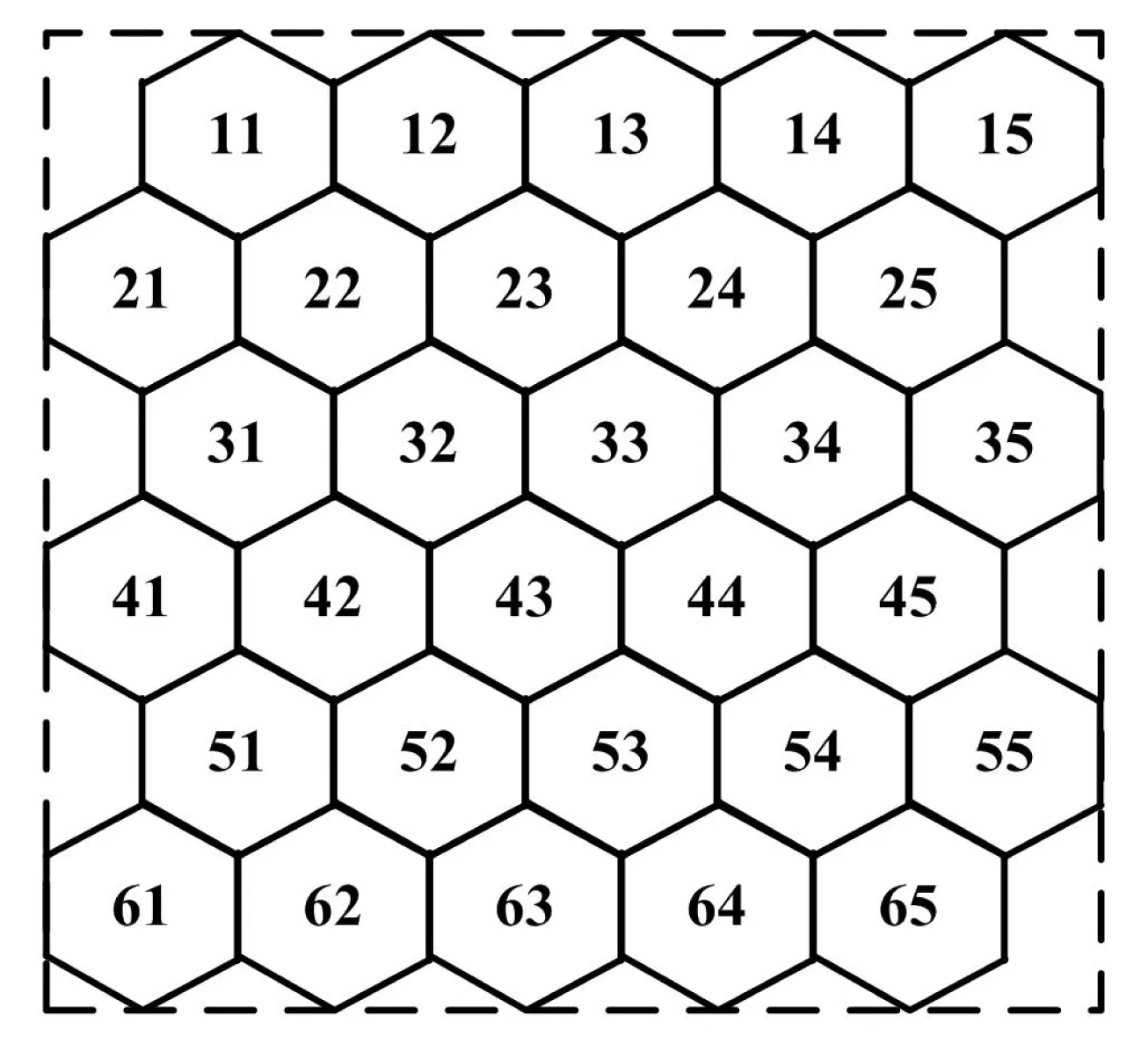
图2 超声波传感器划分示意图
系统工作时,由微处理器单元产生超声波电压信号,超声波电压信号时长为1 ms,超声波驱动电压信号由超声波信号放大电路模块放大,然后驱动超声波发送器阵列组,使安装在上方的超声波发送器阵列组发出超声波信号,超声波传感器采用直接反射式的检测模式。超声波在空气中传播,超声波遇到地面或地面上的人将被反射,被反射的超声波由超声波接收器阵列组接收,并变换成电信号。不同的超声波接收器阵列组中的各个超声波接收器发出的电信号由超声波切换开关电路选中并传到超声波接收信号处理模块进行信号处理。处理完成的超声波电信号传递到微处理器单元,微处理器单元自动测量超声波从超声波发送器发射到被反射再到被超声波接收器接收的时长,通过其中的软件计算出某一个超声波发送器和超声波接收器下方的地面或人到超声波发送器和超声波接收器的距离。
系统正式工作前首先需要保存地面无人时测量的距离,系统工作时若测得的距离小于保存的距离并超出设定的范围,则判断为超声波发送器和超声波接收器下方有人,根据每组超声波发送器和超声波接收器测量得到的距离判断其下方是否有人,然后累加所有超声波发送器和超声波接收器下方有人的数量和,该数量和乘以一个人数综合系数得到区域内人数的总和。人数综合系数一般在系统安装现场通过实验标定。实验表明,根据传感器距离地面高度不同,人数综合系数取值范围一般在0.2~0.5之间。区域中人的分布位置根据超声波发送器和超声波接收器的位置确定。
3 系统软硬件设计
3.1 微处理器
系统的微处理器选用STC生产的STC89C52单片机,单片机最小系统作为电源模块。STC89C52在指令系统、硬件结构和片内资源上与标准8052单片机完全兼容,DIP40封装系列与8051为引脚兼容。STC89系列单片机高速(最高时钟频率90 MHz),低功耗。在单片机最小系统基础上主要扩展了数码显示电路、超声波发射及接收电路、通信接口电路。
3.2 信号处理电路
信号处理电路主要采用集成电路芯片CX20106[7-8],电路如图3所示,US_R1为超声波接收头,OUT_INT当收到超声波是产生一个下降沿,接到单片机的外部中断上。通过微处理器来计算出发射信号到收到信号是产生下降沿这段时间的长度,再通过数学计算转化为距离,然后在显示器上显示[9]。
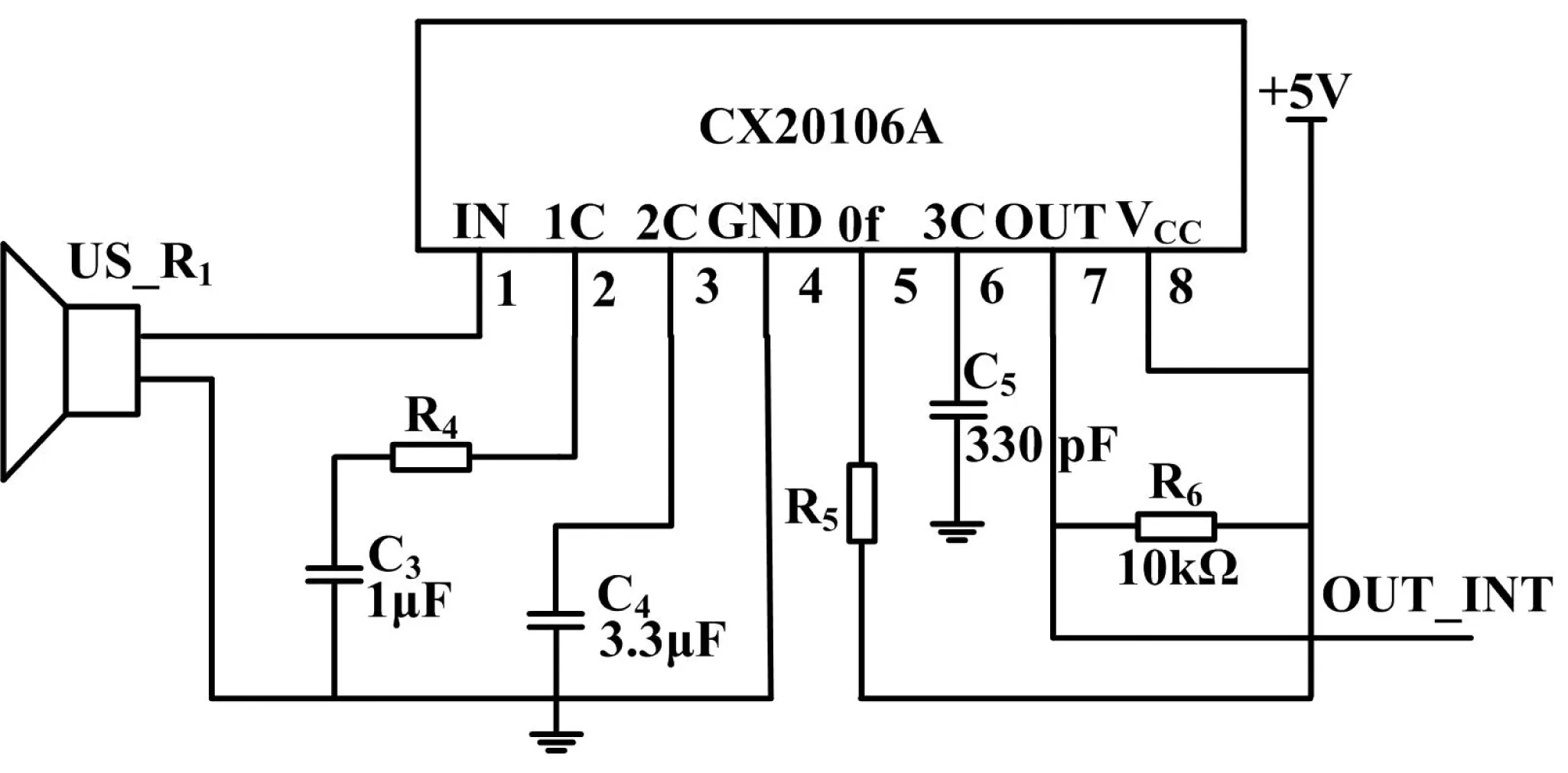
图3 信号处理电路
3.3 超声波信号接收切换阵列
为避免相邻的超声波接收器和超声波发送器或超声波收发器之间相互干扰,系统工作设置了两种工作模式:分时测量方式、分频测量方式。采用分时测量方式时,超声波接收器和超声波发送器选用一种频率的器件。超声波信号接收切换电路如图4所示。
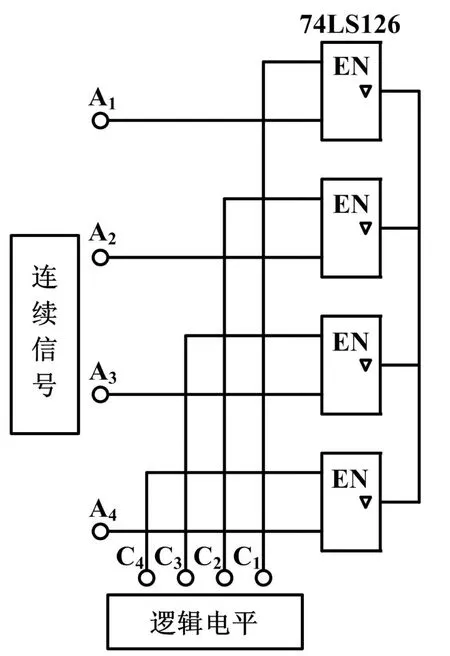
图4 超声波信号接收切换电路
由微处理器发送的逻辑电平控制74LS126选通超声波接收器阵列组中的奇数行奇数列组、偶数行偶数列组、奇数行偶数列组、偶数行奇数列组依次工作,分4次测量得到整个区域的人数。系统工作采用分频测量方式时,超声波接收器和超声波发送器或超声波收发器选用4种不同频率的器件,奇数行奇数列组、偶数行偶数列组、奇数行偶数列组、偶数行奇数列组的器件的每组之间的频率各不相同,组内所有器件的频率相同。
3.4 显示驱动模块
显示驱动包括一个显示驱动芯片MAX7219电路和4个数码管显示器,其与单片机的连接只需要3条线:LOAD(CS)片选引脚、CLK串行时钟引脚、DIN串行数据引脚[10]。显示驱动模块电路如图5所示。
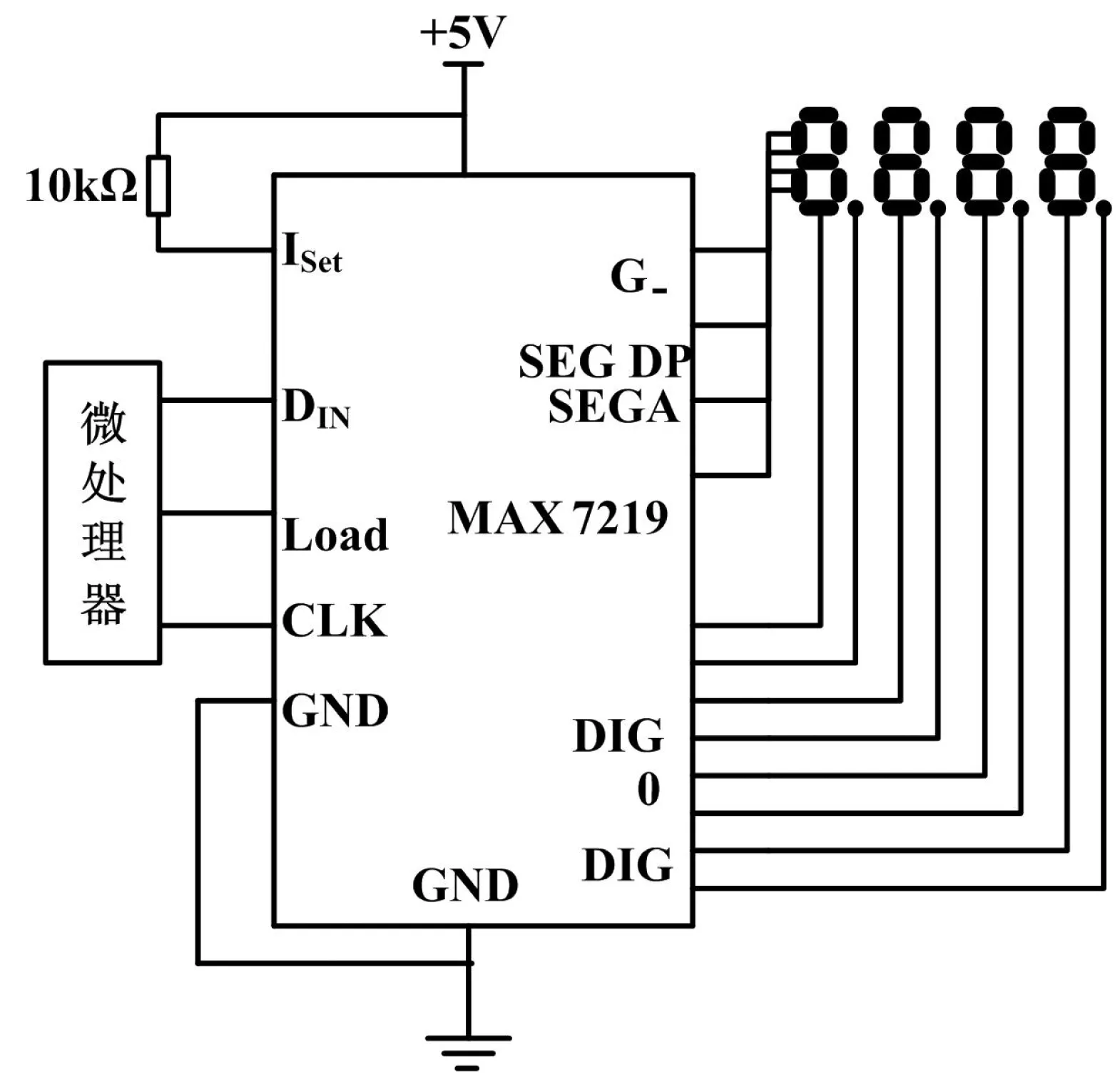
图5 显示驱动模块电路
4 软件设计
系统软件包括主程序、超声波发送和接收子程序、数码显示子程序、输出结果子程序。主程序完成初始化及子程序的调用。系统工作流程如图6所示。
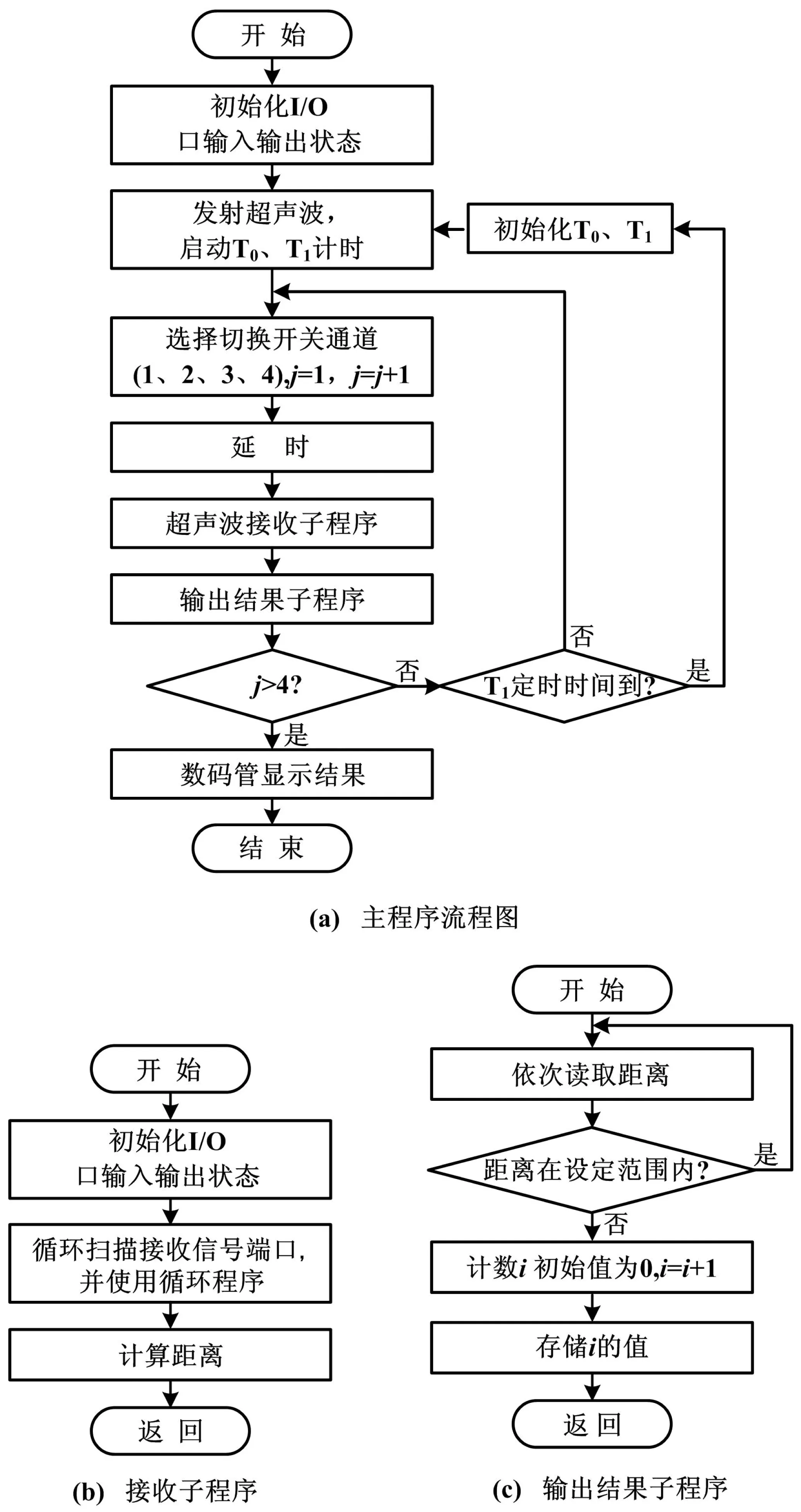
图6 系统工作流程图
系统启动程序后首先进行初始化,再对应用的定时器进行参数设置,之后单片机产生系列40 kHz的超声波,同时启动定时器。由于采用超声波发射和接收反射型结构,它们处在同一直线上且两个探头距离比较近,为避免发射探头对接收探头的影响,需要延迟启动超声波接收检测程序;微处理器切换开关阵列选择相应的通道,开始准备接收超声波信号,有多个接收信号,选用循环扫描查询的方式;之后对其距离进行计算,取在设定范围的个数之和,直到切换开关依次切换一次为止。得出的数据通过数码显示管显示。
5 结束语
本文介绍的人数自动检测系统是基于超声波传感器阵列的,具有安装简单、测量精度高、稳定性好的特点,适用于公交车、电梯等人数统计需要根据人数调度的场所,这样可以使车辆或电梯调度达到最优,避免资源的浪费。该系统设计已获得专利授权[11]。
系统测量一次区域内的人数的时间周期为0.5 s,根据前后两次测量的人的位置的数据的变化,经过后续处理可得到区域内人的运动情况,以及人进入和走出区域的情况。
超声波目前在倒车雷达、导盲系统[4]、自引导车辆等领域已有不少应用,本系统与其他系统的兼容性等方面有待继续研究。
[10]王喜军,姜军,孙福东,等.显示驱动芯片MAX7219在单片集中的应用[J].自动化技术与应用,2009,28(10):121-123.
[11]马殷元,廖理.超声波传感器阵列式人数自动检测系统:中国,201420073600.6[P].2014-05-11.
Design of the Automatic Detection System Based on Ultrasonic Sensor Array for Quantity of Crowd
At present,it is difficult to automatically detect the number of persons waiting for public transportation or elevators,and the existing detection systems are featuring poor accuracy and device complexity,thus the automatic detection system based on ultrasonic sensor array is designed for quantity of crowd.The system is equipped with STC89C52 as the kernel controller,and using ultrasonic ranging principle.The ultrasonic sensors are arranged above the crowd in accordance with cellular form,multiple groups of ultrasonic sensors are controlled by microprocessor to measure the distance; the distance data measured by ultrasonic sensor array are calculated comprehensively,to obtain the number of persons in the region.The system can provide the number of crowd for public transportation scheduling and elevators dispatching systems,to support implementation of automatic scheduling or statistics.
Ultrasonic sensor Ultrasonic array Automatic detection for quantity of crowd Microprocessor Ranging
甘肃省自然科学基金资助项目(编号:1212RJZA052)。
董海棠(1973-),女,2001年毕业于兰州铁道学院车辆工程专业,获硕士学位,副教授;主要从事测控技术方面的研究。
TH7;TP274+.5
A
10.16086/j.cnki.issn1000-0380.201601011
修改稿收到日期:2015-05-27。
猜你喜欢
小学生学习指导(低年级)(2021年5期)2021-07-21
数学物理学报(2021年1期)2021-03-29
铁道通信信号(2018年8期)2018-11-10
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
红蜻蜓·低年级(2017年6期)2017-10-30
支点(2016年11期)2016-12-22
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
数学大世界·小学中高年级辅导版(2009年3期)2009-04-14
