
浅海目标的卡尔曼滤波跟踪技术研究
2016-11-30 08:29付志伟
沈阳理工大学学报 2016年5期
任 波,付志伟
(沈阳理工大学 装备工程学院,沈阳 110159)
浅海目标的卡尔曼滤波跟踪技术研究
任 波,付志伟
(沈阳理工大学 装备工程学院,沈阳 110159)
采用简正波理论对浅海水声损失进行了研究和计算,浅海中的目标声源通过海水传播到海底引发地震波,对海底地震波的初至波和面波进行提取,得到了海底检测点到达海底震源的距离,目标的垂直方向不变,进而得到径向距离,采用卡尔曼滤波技术对目标进行跟踪。仿真结果表明,可以快速地跟踪上目标的运动状态,对浅海目标跟踪具有重大意义。
水声损失;初至波;面波;卡尔曼滤波
对于浅海中的舰船在航行过程中必然会向四周辐射能量,可以把航行的舰船目标看作是一个点声源,那么这个声源通过海水介质的传播,最终到达海底产生了海底地震波[1]。对这个海底地震波的初至波和面波分别进行提取,得到初至波和面波的到达时间差,由于初至波和面波的速度是已知的,所以可以获得观测点距离海底震源的距离。
矢量水听器不仅可以给出之前压力传感器给出的声压信息,而且还能够给出振动速度的信息。声压是一个标量而振速是一个矢量,因此矢量水听器可以同时给出标量和矢量,更好更全面地反映声场的性质。通过矢量水听器可以获得目标的方位角以及俯仰角等方位信息同时它还可以测量海水直达波的到达时间,进而获得点声源距离水听器的径向距离[2]。
Kalman提出了一种时域方法,将线性系统中的状态空间引入到估计理论中,把这种滤波方法叫做卡尔曼滤波,而伴随着技术的不断发展和进步,信息融合的时代已经到来,很多情况下需要将多种信息融合在一起以便得到更好的效果[3]。而卡尔曼滤波技术就是信息融合中最常用也是最重要最好用的方法之一。
由于以前对海水中目标的定位跟踪都是单独采用地震波技术或者水声技术,使得定位和跟踪的精度很低,所以本文采用卡尔曼滤波技术对水声技术和地震波技术进行融合,进而得到更加准确的定位跟踪效果。
1 基于简正波理论对浅海水中传播特性的计算
(1)
式中:H为海水深度;r为水平方向距离;ξn为第n阶简正波矢量在水平方向上的分量;kzn为本征值;z垂直方向距离;z0为观测点的坐标。
(2)
式中Zn(z)是一个正交的函数家族。
如果Zn和ξn为实数时,则上面的公式可以写为


Zn(z0)Zm(z)Zm(z0)e-j(ξn+ξm)r
(3)
当传播条件充分不均,各阶简正波相位无关,交叉乘积相的和接近于零,最后公式可以化简为[4]
(4)
2 基于有限差分法对波动方程的计算
有限差分就是将想要计算的区域范围进行分割,分割成有限个小区域的形式(把每一个小区域叫做网格),可以用每一个网格的点取代连续的求解区域。最后借助微商和差商之间的近似关系,把微分方程的求解问题变成对差分方程的求解问题[5]。
将非均匀介质的声波波动方程用下面的形式来表示
(5)
式中: U=U(x,z,t)为声压;V是声波的波速;ρ代表密度;s(x,z,t)为震源函数。
时间域上的二阶空间域上的四阶波动方程的有限差分表达形式如下:
(6)

图1为采用有限差分法得到的海底地震波传播规律图。

图1 海底地震波传播规律图
从图1中可以看出,浅海中的声波沿着垂直方向向海底传播,到达海底后以海底地震波的形式向水平方向传播。
3 初至波与面波的提取
当地震发生后,地震的观测点最先接收到的波被称作初至波。它的起跳时间最早、能量很强。相对于横波和面波其传播速度最快,到达时间最早,频率最高,幅值最低。因此利用其到达时间最早的特点采用能量因子法对初至波进行提取。
面波的能量非常高,而且具有低频频散等特性,面波的传播速度较其它的波慢,所以它的到达时间较晚。根据其频率最低而能量最高,幅值很居中这些特性,用时频分析方法对其进行处理,把信号从时间域变换到频率域,然后观察时间与频率的关系,看其能量以及幅值的分布信息,将其与其它的波进行分离,最后达到提取的目的[6-7]。图2为采用能量因子法提取的初至波时刻图。

图2 初至波时刻图
从图2中可以很明显地看到,初至波在0.05s时到达观测点。
图3为采用时频分析法提取的面波时刻图。
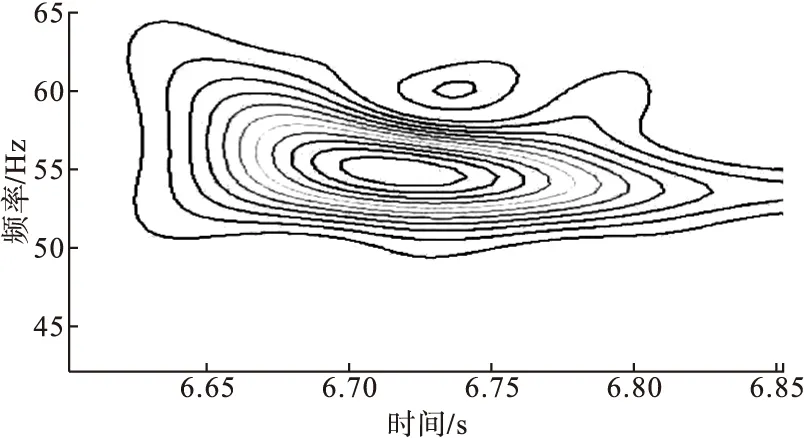
图3 面波时刻图
从图3中可知面波的到达时刻为6.75s。
4 基于卡尔曼滤波方法的跟踪计算
考虑下面这样一个状态空间模型的描述的动态系统
X(k+1)=ΦX(k)+ΓW(k)
(7)
Y(k)=DX(k)+V(k)
(8)
式中:k为离散时间,系统在时刻k状态是X(k);Y(k)则是对应状态的观测信号;W(k) 为输入的白噪声;V(k)为观测噪声;Φ为状态转移矩阵;Γ为噪声驱动矩阵;D为观测矩阵[8]。式(7)为状态方程,式(8)为观测方程。则递推的卡尔曼滤波器如下:
状态一步预测:

(9)
状态更新:

(10)

(11)
滤波增益矩阵:
K(k+1)=P(k+1|k)DT[DP(k+1|k)DT+R-1]
(12)
一步预测协方差阵:
P(k+1|k)=ΦP(k|k)ΦT+ΓQΓT
(13)
协方差阵更新:
P(k+1|k+1)=[In-K(k+1)D]P(k+1|k)
(14)
(15)
上述的卡尔曼滤波是线性的卡尔曼滤波,如果系统是非线性的系统,则可以应用非线性卡尔曼滤波进行计算,只需将状态转移矩阵Φ(k+1|k)和观测矩阵D(k+1)用f和h的雅可比矩阵代替即可。
假设通过计算得到水面上的舰船产生的震动经80m深的浅水传播后,除去浅水中的传播损失,对到达海底的初至波和面波进行提取,得到初至波和面波的到达时间差,所以可以算出舰船目标距离观测点的径向距离r,经过水听器测得的目标在水平方向上匀速航行,x方向的速度为16m/s,y方向的速度为9m/s,通过水听器测得目标的方位角和目标的俯仰角,进而得到观测点与目标的x轴方向距离为303m,观测点与目标的y轴方向距离为175m,z轴方向距离为80m是不变的。
通过对卡尔曼滤波的分析可以知道系统的状态方程是线性的,而观测方程是非线性的,所以要用非线性的卡尔曼滤波。由上面给出的仿真条件可以建立起系统的卡尔曼滤波模型,将仿真条件给出的数值代入,采用Matlab仿真软件对其进行仿真,扫面周期T设为1s。
vx(k+1)=vx(k)+ux(k)T
vy(k+1)=vy(k)+uy(k)T
(16)
用表达式(17)表示系统的状态:
(17)
所以系统的状态方程为:
X(k+1)=ΦX(k)+ΓU(k)
(18)
(19)
目标的观测方程为
(20)
(21)
图4为经过卡尔曼滤波后的x方向上的距离跟踪图。

图4 x方向上距离跟踪图
从图4中看出,采用卡尔曼滤波技术可以快速地跟踪上目标在x方向上的位移。
图5为经过卡尔曼滤波后的y方向上的距离跟踪图。

图5 y方向上的距离跟踪图
从图5中看出,采用卡尔曼滤波技术可以快速地跟踪上目标在y方向上的位移。
图6为滤波后的x方向速度跟踪图。
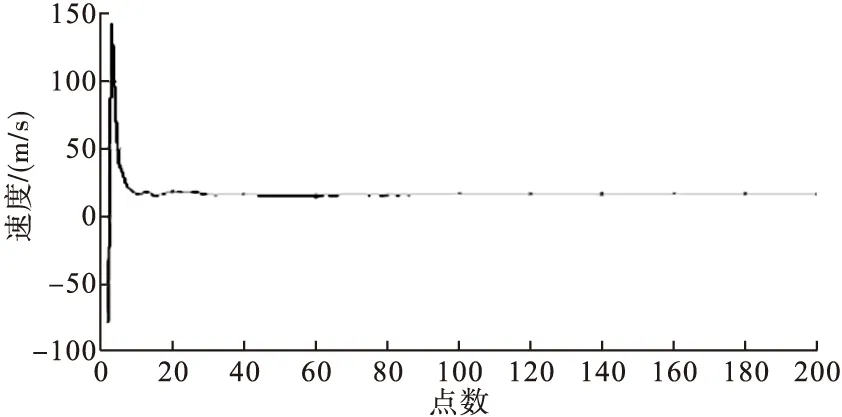
图6 x方向的速度跟踪图
从图6中看出,采用卡尔曼滤波技术可以快速地跟踪上目标在x方向上的速度。
图7为经过滤波后的y方向速度跟踪图。

图7 y方向的速度跟踪图
从图7中看出,采用卡尔曼滤波技术可以快速地跟踪上目标在y方向上的位移。
图8为x方向的距离跟踪误差图。
从图8中看出,在x方向的距离跟踪误差随着点数的增加迅速减小。
图9为y方向的距离跟踪误差图。
从图9中看出,在y方向的距离跟踪误差随着点数的增加迅速减小。

图8 x方向距离跟踪误差图

图9 y方向距离跟踪误差图
图10为x方向速度跟踪误差图。

图10 x方向速度跟踪误差图
从图10中看出,在x方向的速度跟踪误差随着点数的增加迅速减小,最终为0。
图11为y方向速度跟踪误差图。

图11 y方向速度跟踪误差图
从图11中看出,在y方向的速度跟踪误差随着点数的增加迅速减小,最终为0。
5 结论
(1)通过能量因子法对海底地震波的初至波进行了提取,利用时频分析的方法对海底的面波进行了提取,结果表明两种方法是可行的。
(2)通过上面的仿真,证明了利用卡尔曼滤波技术,可以很好地跟踪浅海的舰船运动目标,对运动目标在两个方向上的速度和位置都能够很快地滤除噪声等干扰信号,快速准确地跟踪上目标的运动状态,并保持一致。
[1]李响,颜冰,周穗华.基于直达波与地声界面波时延的目标定位方法[J].探测与控制学报,2010,32(6):50-53.
[2]李楠松,朴胜春,邢传玺.单矢量水听器对海面目标高分辨定位方法研究[J].传感器与微系统,2015,34(2):37-39.
[3]勇刚,李宁,奔粤阳.最优状态估计[M].北京:国防工业出版社,2013.
[4]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,2010.
[5]杨莹.二维地震波场有限差分法数值模拟研究[D].北京:中国地质大学,2009:10-17.
[6]张丽娜.数字信号处理的时频分析方法综述[J].信息技术,2013(6):26-28.
[7]邵开胜,潘冬明,胡明顺,等.基于时频分析的面波探测技术研究与应用[J].能源技术与管理,2011 (2):126-128.
[8]黄小平,王岩.卡尔曼滤波原理及应用[M].北京:电子工业出版社,2015.
(责任编辑:马金发)
Research on Kalman Filter Tracking Technology Applied to Target in Shallow Water
REN Bo,FU Zhiwei
(Shenyang Ligong University,Shenyang 110159,China)
The shallow water losses are studied and calculated by Jane positive wave theory,sound source of shallow water target will trigger seismic waves,through the shallow water propagation.Then extracting is done about the primary wave and surface wave.So the distance from detection point to the source of the seabed can be obtained.Vertical orientation of the target is constant,then the radial distance will be calculated.The target is tracked by kalman filter technology.The simulation results show that it can quickly track the state of the target.It has great significance for shallow water target tracking.
water losses;primary wave;surface wave;Kalman filter
2015-10-23
任波(1962—),男,教授,研究方向:信号处理、导航制导与控制。
1003-1251(2016)05-0054-05
TN911
A
猜你喜欢
电声技术(2022年3期)2022-04-28
地震研究(2021年1期)2021-04-13
现代农村科技(2021年2期)2021-03-15
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
石油地球物理勘探(2020年5期)2020-10-17
应用科技(2020年1期)2020-06-18
压电与声光(2019年4期)2019-08-29
绿色科技(2019年12期)2019-07-15
长江大学学报(自科版)(2015年23期)2015-12-04
山东建筑大学学报(2015年4期)2015-05-11
