
基于Solidworks和Adams行星式销齿轮研磨机的建模与运动仿真
2016-11-28 03:10吴耀宇薛培军
中州大学学报 2016年2期
吴耀宇,薛培军
(中州大学 机电与车辆工程学院,郑州 450044)
基于Solidworks和Adams行星式销齿轮研磨机的建模与运动仿真
吴耀宇,薛培军
(中州大学 机电与车辆工程学院,郑州 450044)
通过在Solidworks软件中建立行星式销齿轮研磨机的三维实体模型,采用Adamas软件对模型进行转换成虚拟样机。通过计算及运动学仿真验证了虚拟样机模型的准确性,同时指出通过改变接触副参数提高模型准确性的方法,为进一步研究工件运动特性、提高研磨加工效率、保证工件研磨加工精度奠定了基础。
Solidworks;Adams;行星式研磨机;销齿轮;虚拟样机
0 引言
研磨是超精密加工的重要方法,具有加工精度高、适用范围广等优点。行星式平面研磨机是常见的一种平面研磨设备,运动参数调整方便,可实施单双面加工,加工效率高[1]。许多研究和实验表明,行星式平面研磨机研磨效率、研磨精度、研磨盘磨损的均匀性与研磨运动参数的合理选择密切相关[2]。绝大部分的研究采取的主要是解析法建立磨具与工件之间的运动方程[3],与实际的运动存在一定差距;而在实际加工中,对研磨机运动参数的选择过多地依赖经验[4],加工质量的偶然性较大,无法对实际研磨加工中存在的问题提出针对性的改进方案。
这里以德国Peter Wolters公司AC700F型大型圆盘平面数控磨床为研究对象,运用机械系统运动学、动力学仿真分析软件Adamas对三维建模软件Solidworks实体创建的行星式平面研磨机进行仿真,为优化研磨机运动参数做好准备。
1 行星式销齿轮研磨机三维模型的建立
1.1 研磨机及运动原理
德国Peter Wolters公司AC700F型行星式销齿轮大型圆盘平面数控磨床,可同时加载6个载盘(行星轮)带动多个工件一起运动,研磨盘为固结磨料研磨盘[5]。图1为其结构及运动示意图。上、下研磨盘、中心销齿轮(太阳轮)分别由三个独立的动力源驱动,上研磨盘3顺时针旋转,下研磨盘4、中心销齿轮1均可正反转,工件5随载盘(行星轮)2在中心销齿轮(太阳轮)1和固定(也有转动的)的内销齿轮6的共同作用下做复杂的平面曲线运动。研磨过程中通过气缸对上研磨盘4施加力而在上、下研磨盘和工件之间形成研磨压力。上研磨盘4与加压杆之间为球面铰接,以保证下研磨盘4研磨平面的浮动。

图1 研磨机结构及运动示意图1.太阳轮 2.行星轮 3.上研磨盘 4.下研磨盘 5.工件 6.内销齿轮

图2 研磨机运动原理图
根据研磨机的运动原理,考虑到工件运动对于行星轮系运动的影响远小于行星轮系对工件运动的影响,同时考虑到工件相对于上研磨盘、下研磨盘运动的相似性,可以将研磨机简化为如图2的行星轮系。设太阳轮角速度为ω1,行星轮自转角速度为ω2,行星轮公转角速度(假想系杆5的角速度)为ω5,则有:
(1)
(2)
式中,z1为太阳轮齿数,z2为行星轮齿数,z6为内齿圈齿数。本行星式销齿轮研磨机的太阳轮销齿数为54,载盘销齿数为48,内齿圈销齿数为150。
1.2 研磨机三维模型的建立
利用Solidworks软件分别对行星式销齿轮研磨机的各个零件进行实体建模、虚拟装配。为了使模型在Adams中的分析过程中尽量简单化,在进行装配时可以将气缸、电机、轴承、螺栓等起辅助作用的零部件省略,导入Adams后用一些相应的运动副来代替。由于行星销齿轮机构同时具有内啮合和外啮合,这就需要比较精确地造型和装配技术。采用直接装配法[6]进行装配,同时利用干涉检查命令对行星销齿轮的装配结果进行检查。图3即是为完成总体装配的行星式销齿轮研磨机的三维模型(此处隐去了上研磨盘)。
2 研磨机Adams虚拟样机动态仿真
2.1 模型简化及导入Adams
在Solidworks实体设计中完成实体建模后,将其转化为与Adams具有相同核心实体造型技术的Parasolid格式文件导入Adams中。具体做法是先将建好的Solidworks实体文件另存为x_t类型文件,然后再重新命名为扩展名为xmt_txt类型的文件。 运行Adams/View后用导入命令(import)选定转换过的文件导入。然后在Adams/View对各构件的名称、材料等基本信息进行设定。

图3 研磨机三维模型
2.2 约束的添加及驱动
机构的相对运动是通过添加各种约束实现的[7]。为了进行运动仿真,需要对导入到Adams/View中的模型各构件之间添加正确的约束[8]。根据运动学分析对简化后的虚拟行星式销齿轮研磨机施加如下约束:内销齿轮相对于地面的固定副;中心销齿轮(太阳轮)相对于地面的旋转副;行星轮相对于太阳轮的接触副;行星轮相对于内销齿轮的接触副;工件相对于行星轮的圆柱副;工件相对于下磨盘的接触副;工件相对于上磨盘的接触副;下研磨盘相对于大地的旋转副;上研磨盘相对于大地的旋转副。在此模型中,共有三个驱动:太阳轮、上研磨盘和下研磨盘。工件被放在行星盘的孔中可以自由转动,上表面(加工面1)与上磨盘平面接触,下表面(加工面2)与下磨盘平面接触,因此其转动的方向是随着与上研磨盘和下研磨盘接触面之间的摩擦力矩的变化而改变。图4为创建了约束副和驱动的行星式销齿轮研磨机(图中隐去了上研磨盘)虚拟样机,行星轮孔中的黑色部分为工件。

图4 模型虚拟样机
2.3 运动学仿真及模型完善
对上述所建行星式销齿轮研磨机虚拟样机进行运动仿真。输入驱动载荷值:太阳轮转速120r/min,下研磨盘自转速-160r/min,上研磨盘自转速165r/min,仿真时间t=0.5s,步长steps=100。图5(a)显示了行星轮的公转角速度曲线。利用PostProcessor统计分析命令,可得出行星轮公转角速度及自转速度平均值分别为189.90deg/s、403.80 deg/s,与按照公式(1)和(2)计算得出的190.59deg/s和405.0deg/s值相比较,误差分别为0.36%及0.30%,满足传动比要求,证明建立的模型是准确的。同时从曲线可以看出,其角速度比较大的波动。这是由于太阳轮和行星轮之间、行星轮和内齿圈之间的约束采用的是接触副而不是齿轮副,从而在太阳轮与行星轮、行星轮与内齿圈啮合时产生了比较大的接触应力及微量位移(行星轮与内齿圈接触力见图6(a))。

图5 行星轮公转角速度

图6 行星轮与内齿圈接触力
尽管这样做更符合研磨机运行的实际工况且在仿真时能得到更多的运行信息,但为了使这些影响降到最低,需要对模型尤其是接触副部分进行完善。本模型采用的是基于碰撞函数的接触算法(IMPACT-Function-based contact),在材料选定后,则其刚度(Stiffness)就已确定。可以通过改变瞬时法向力指数(Force Exponent)、阻尼系数(Damping)、全阻尼渗透变形量(Penetration Depth)减少接触力的波动幅度。参数调整后再次进行仿真,得到的行星公转角速度和接触力分别为图5(b)和图6(b)所示。结果显示调整后的角速度、接触力波动幅度显著减少,提高了模型的精度。
研磨轨迹对研磨效率和研磨质量有着重要影响,是认识研磨过程机理的基础。研磨轨迹曲线可以分为两类:研磨盘上的一点相对于工件的运动轨迹以及工件上的一点相对于研磨盘的运动轨迹。前者对于研磨工件表面形貌、纹理有着重要作用,而后者对于揭示研磨去除率、研磨盘的磨损有着重要意义。许多学者主要是解析法建立磨具与工件之间的运动方程来研究两种轨迹及其变化规律,而在Adams中利用Create Trace Spline命令可以很方便地描绘出两种轨迹。图7 为在不同参数下工件相对于下研磨盘的运动轨迹。
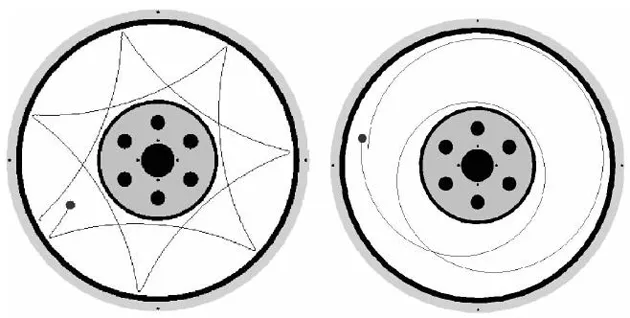
图7 工件相对于研磨盘运动轨迹
3 结论
在实际研磨过程中,操作者无法测量工件及研磨盘的运动状态,只能依靠操作经验不断试验才能提高研磨加工效率和零件加工精度。通过在Solidworks软件中建立了行星式销齿轮研磨机的三维实体模型,采用Adamas虚拟样机技术进行运动学仿真,指出了通过改变接触副参数提高模型准确性的方法。为进一步研究工件运动特性、提高研磨加工效率、保证工件研磨加工精度奠定了基础。
[1]Uhlmanna E,Ardelta T.Influence of Kinematics on the Face Grinding Process on Lapping Machines[J].CIRP Annals-Manufacturing Technology, 1999,48(1):281-284.
[2]吴宏基,曹利新,刘健,等.行星式平面研磨机研抛过程运动轨迹分析[J].大连理工大学学报,2002,42(4):451-455.
[3]杨建东.高速研磨技术 [M].北京:国防工业出版社, 2003:126-129.
[4]吴耀宇,刘冬敏,谢纪勋.陶瓷CBN研磨盘用于喷油器中间体的高效研磨技术[J].金刚石与磨料磨具工程,2013, 33(4):42-45.
[5]吴宏基,曹利新,刘健,等.基于行星式平面研磨机研抛过程的运动几何学分析[J].机械工程学报,2002(6):144-147.
[6]鲍和云,朱如鹏,靳广虎,等.间隙对两级星型齿轮传动动态特性的影响研究[J].机械科学与技术,2009(1):102-107.
[7]王振成,贺书乾,刘爱荣,等.齿轮传动的虚拟变位研究[J].机械科学与技术,2009(1):129-133.
[8]孙毅,屠立.反馈式封闭行星机构的二次反转设计方法[J].机械设计与研究,2014(1):56-59.
(责任编辑 赵冰)
Modeling and Movement Simulation of Planetary Pin Gear Lapping Machine Based on Solidworks and Adams
WU Yao-yu, XUE Pei-jun
(College of Mechanical and Electrical Engineering and Vehicle Engineering, Zhongzhou University, Zhengzhou 450044, China)
The model of the planetary pin gear lapping machine with the solidworks software is built, and then Adamas converts the model to virtual prototype.The accuracy of the model is verified by calculation and kinematics simulation.At the same time, the method to improve the accuracy of the model by changing the parameters of contact pair is pointed out, which lays a foundation for further study of the workpiece movement characteristics, improving the efficiency of grinding process, and ensuring the workpiece grinding machining accuracy.
Solidworks; Adams; planetary lapping machine; pin gear; virtual prototype
2016-01-27
2015年度河南省重点科技攻关项目“基于Adams仿真的高效研磨用半永久性超硬材料研磨盘研制”(152102210017)
吴耀宇(1965—),男,河南郑州人,硕士,中州大学机电与车辆工程学院教授,主要从事精密加工的教学和研究。
10.13783/j.cnki.cn41-1275/g4.2016.02.022
TS803
A
1008-3715(2016)02-0108-04
猜你喜欢
选煤技术(2022年2期)2022-06-06
石材(2022年1期)2022-05-23
军事文摘(2020年18期)2020-10-27
百科探秘·航空航天(2020年6期)2020-07-09
石材(2020年2期)2020-03-16
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
读者(2018年20期)2018-09-27
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
少儿科学周刊·儿童版(2016年1期)2016-03-14
