采用磁编码器的直流电机控制系统设计及试验
2016-11-26 08:19袁茂强梁世盛乔凤斌郭立杰
自动化仪表 2016年8期
袁茂强 梁世盛 王 力 乔凤斌 郭立杰
(上海航天设备制造总厂,上海 200245)
采用磁编码器的直流电机控制系统设计及试验
袁茂强 梁世盛 王 力 乔凤斌 郭立杰
(上海航天设备制造总厂,上海 200245)
针对先进试验超导托卡马克(EAST)遥操作检修机械臂上刷式直流电机的位置和速度控制,设计了一种采用磁编码器AS5311的伺服控制器。该控制器采用TI公司的DSP28035和DRV8840芯片,实现了有刷直流电机的控制;根据建立的直流电机数学控制模型,设计了位置和速度双闭环PID控制策略;通过Matlab/Simulink构建了控制系统仿真模型,对模型参数进行优化设计;利用磁粉制动器模拟负载,搭建了直流电机测试平台进行试验验证。试验结果表明,该控制器可实现直流微电机的位置和速度控制,达到了较好的控制效果。
直流电机 磁编码器 控制器 PID控制 DSP 闭环控制 电机 模型 测试平台 核能 热核聚变
0 引言
先进试验超导托卡马克(experimental advanced superconducting tokamak,EAST)热核聚变试验装置是我国自行设计研制的首个国际全超导托卡马克装置,是国家“九五”重大科学工程项目[1]。EAST目前已经成为国际上最重要的稳态/长脉冲和高参数等离子体物理试验平台之一,其内部结构复杂、操作多样,对于等离子体品质参数和约束性能的要求也在不断提高[2]。遥操作检修机械臂系统(articulated inspection arm,AIA)是其四大关键子系统之一,主要用于EAST试验平台损失部件的快速拾取与更换。该遥操作检修机械臂系统有多个自由度,末端配有CCD摄像机与执行部件,可在不破坏真空环境的条件下,对内部器件进行近距离观测和维护。整个系统可运行于高真空(10-5Pa)和高温环境(工作环境温度80 ℃),对保障EAST的安全运行、提高试验效率及有效运行时间起着非常重要的作用。
2002年,法国原子能委员会(atomic energy commission,CEA)开始了对托克马克多关节内窥机械臂系统的研制,该系统于2008年9月首次在Tore-Supra环境下对内部部件进行了近距离的观测作业[3]。国内在热核聚变机器人操作系统的研究方面起步相对较晚,目前还处于初级阶段。多关节抓取机械臂的难点与关键性问题主要体现在多关节协调运动控制、力反馈控制、偏差补偿控制、振动抑制控制以及高温环境下的CCD成像装置开发等方面,中科院等离子体所在相关领域已进行了深入研究,并取得了一定的研究成果。本文研究的直流电机控制器系统是遥操作检修机械臂系统的基本单元,主要包括直流有刷伺服电机驱动器、单关节高温环境位姿与温度数据采集器、上位机单关节控制与监控软件。
目前,关于无刷直流电机和步进电机的控制器设计及控制的参考文献较多[4-9],对于刷式直流电机的参考文献较少。但由于刷式直流电机仅有两根控制线,具有线性扭矩/电流曲线,并且速度、扭矩与电流、电压成正比,电机易于控制,在办公自动控制、智能家居、生产自动化以及医疗器械等领域应用广泛。本文从刷式直流电机底层硬件设计开始,建立了刷式直流电机的数学模型,并进行了Matlab/Simulink仿真。为了对直流电机控制器的控制效果进行验证,搭建了试验平台,利用磁粉制动器模拟负载,并将定位结果与海德汉编码器ERN180的测量结果进行比对。试验结果表明,该控制器可以实现项目提出的各项功能要求并满足技术指标。
1 遥操作检修机械臂控制系统的组成
遥操作检修机械臂系统含有多个运动关节,每个运动关节通过刷式直流电机进行运动控制,控制系统架构如图1所示。该运动控制为实现多关节联合点位运动,通过梅花链串联起多个控制单元。该方法控制方便,操作简单。该控制单元功能结构丰富,可扩展性强,可实现后续相关刷式直流电机的精确控制。各控制单元通过以太网TCP/IP协议与上位机进行数据通信,由上位机实现路径轨迹规划、控制算法与误差补偿等功能;另外,控制单元还与嵌入式数据采集卡单元进行基于CAN的数据通信,数据采集卡采集磁编码器S的位置和速度信息并反馈给DSP,实现运动控制。同时,为保护电机、防止碰撞,控制器需具备过载过压保护功能,当负载过大时即自动停止工作。
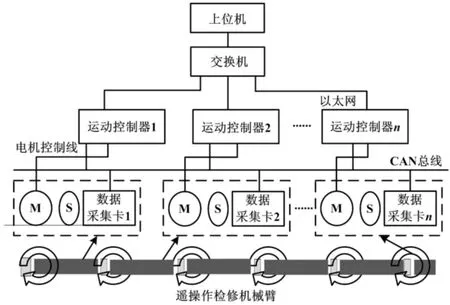
图1 系统架构图
系统中的运动控制器单元硬件采用TI公司的TMS320F28035控制芯片作为主MCU,DRV8840作为驱动芯片,并采用“STM32单片机+ENC28J60”作为以太网通信模块,实现控制器与上位机的TCP/IP协议通信;通过AS5311芯片实现对磁编码器变化位置的采集,经过PIC单片机处理后,将“位置+速度”数据通过CAN总线传送到DSP中,作为反馈数据进行位置和速度控制。控制器采用模块化设计,将控制板、驱动板以及数据采集卡分开设计,提高可互换性。控制器功能框图如图2所示。
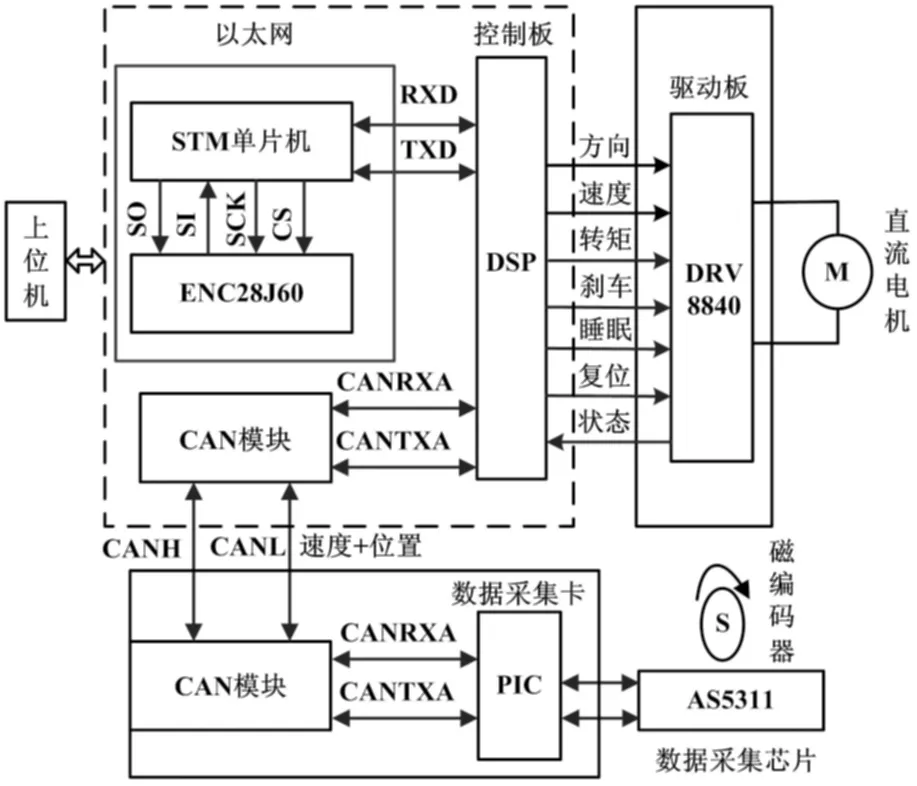
图2 控制器功能框图
在运动控制单元中,DSP主要进行位置闭环和速度的PID运算,并对采集到的位置信息进行误差补偿,以提高测量精度;同时,通过复杂数学运算,实现电机的精确控制。DRV8840实现对电机的直接控制,其电机使能端通过DSP输出的PWM波实现对电机的速度控制。控制板通过驱动接口与驱动板相连接,在正常工作过程中,驱动板与控制板进行数据通信,实现DSP对控制芯片的控制。以太网通信模块采用STM32F103C8T6作为嵌入式微控制器,其内核为ARM32位的CortexTM-M3 CPU,SPI接口可与ENC28J60进行网络通信。采用MFC进行Windows套接字网络编程,设计上位机控制程序,将上位机作为服务器,控制器作为客户端。采用TCP/IP协议实现与控制器的数据通信,对控制器进行控制命令的输入,并及时反馈采集到的位置信息。
位置的测量精度将直接影响电机的最终定位精度。由于控制关节工作时处于80 ℃高温环境,所有元器件及编码器均要适用于此环境。光栅编码器对温度较为敏感,此时不再适用于这种高温环境。在本系统中选择128级磁环作为测量用的传感器,相对于光栅编码器,磁编码器的结构简单、成本低、功耗小,而且不易受粉尘、温度的影响。选用奥地利芯片AS5311,通过感应磁感应强度的变化来进行位置信息采集,数据采集选用PIC单片机作为信息处理MCU,并设计CAN通信模块与主控制板进行数据通信。
2 刷式直流电机控制系统的建模及仿真
为了使系统处于不断启动、制动、反转等过渡过程,以保持较好的动态性能,在此引入位置、转速负反馈。对于转矩控制,在DRV8840可以通过I0~I4引脚的变化,实现对最大负载力矩的控制,进而限制瞬间过载电流,防止因电流过大对电机造成破坏。本文首先建立电机的数学模型,然后通过Matlab/Simulink仿真,确定PID参数范围,以达到较好的控制效果。
2.1 数学模型
本系统所用电机为刷式直流电机FAULHABER 3257G,额定电压为24 V,最大允许电流为2.3 A。建立单闭环调速系统的数学模型[10]如下。
①FAULHABER 3257G直流电机为永磁直流电机,等效电路如图3所示。在电流连续的情况下,直流电机的电枢回路电压平衡方程为:
(1)
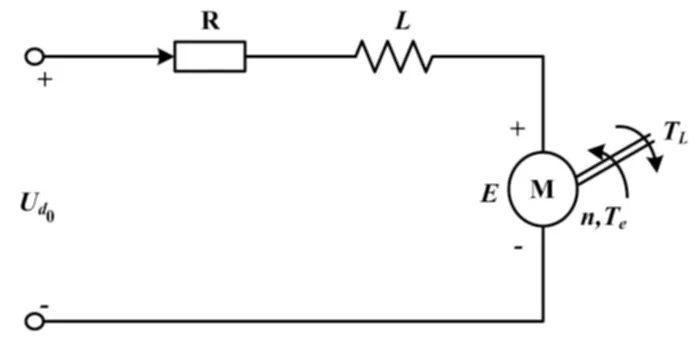
图3 刷式直流电机等效电路图
②忽略黏性摩擦,电动机轴上的转矩和转速应服从电力拖动系统的运动方程式:
(2)
式中:TL为包括电机空载转矩在内的负载转矩;GD2为电机轴上的飞轮惯量。
定义电枢回路的电磁时间常数:
(3)
定义电机拖动系统的机电时间常数:
(4)
③进一步简化模型,将式(3)和式(4)代入式(1)和式(2),整理后得:
(5)
(6)
对式(5)、式(6)进行拉式变换,得到电压与电流、电流与电动势之间的传递函数分别为:
(7)
(8)
根据式(7)和式(8),并考虑到转速与电压成正比,n=E/Ce,可以得到用拉普拉斯变换表示的直流电动机调速系统的结构图,如图4所示。
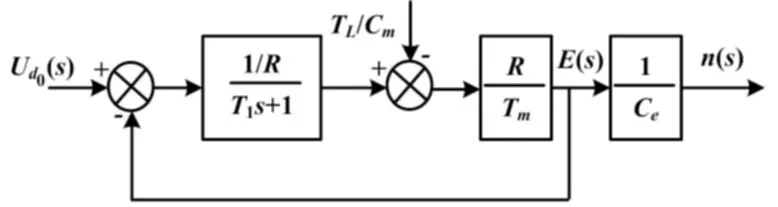
图4 直流电机调速系统结构方框图
直流电机有两个输入量,一个是控制输入量理想空载整流电压Ud0,另一个是扰动负载电流TL/Cm。
2.2 Matlab/Simulink动态仿真模型
为便于确认直流电机的控制参数,根据所建立的电机控制模型,对控制结果进行Matlab/Simulink仿真,以确定最优设计参数。根据直流电机的数学控制模型,建立速度环Simulink电机仿真模型。当转速输入分别为10r/min和20r/min时,末端转速仿真结果如图5所示。
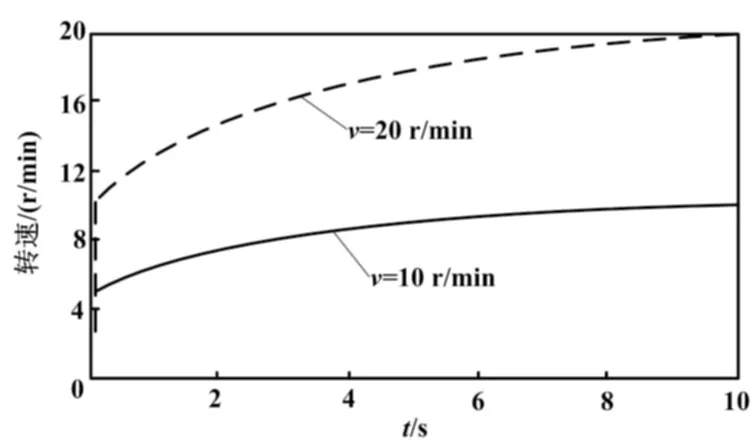
图5 末端转速仿真输出曲线
经过Matlab/Simulink仿真与试验验证,可以确定位置和速度的PID控制参数取值范围。
3 试验结果及验证
为了分析直流电机控制器的控制效果,搭建试验平台进行验证。利用磁粉制动器模拟负载,将磁环编码器输出结果与海德汉编码器ERN180的测量结果进行比对。ERN180为5000线编码器,分辨力达0.072°,可以满足试验要求。直流电机输出端配有246∶1的行星减速器,其输出轴经过联轴器与磁编码器、海德汉光栅编码器相连,最后末端带动磁粉制动器转动;磁编码器下边为数据采集卡,实现电机输出轴末端位置信息的采集,海德汉编码器的输出经过工控机中的采集计数卡采集后,通过LabVIEW编程实现信息采集;通过对磁粉制动器施加不同的电流,可以模拟不同的负载力矩,力矩可以通过磁粉制动器中的力矩传感器进行测量并显示。
初步试验中,直流电机每1°采集一次数据,将磁编码器的测量结果与海德汉编码器数据进行比较,在-179°~179°运动范围内,测量误差曲线如图6所示。测量结果表明,在-179°~179°的运动范围内,磁环的测量误差小于0.7°,通过后期标定试验可进一步提高测量精度。
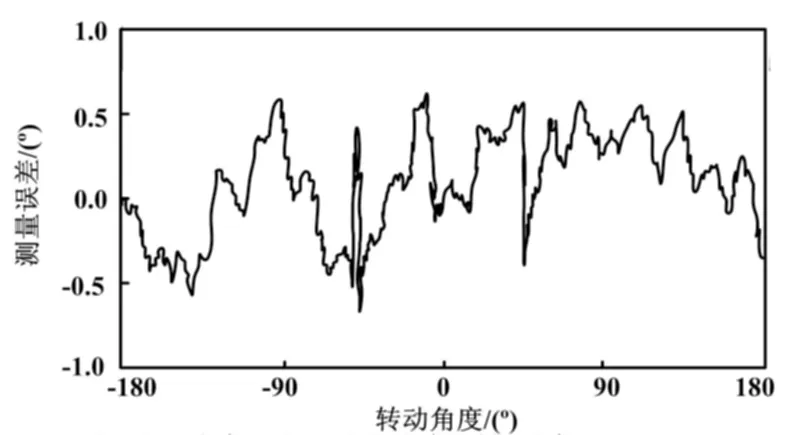
图6 测量误差曲线
为分析不同负载下转速闭环控制效果,通过给磁粉制动器输入不同电流,可模拟出不同负载的运动效果。设定速度为5°/s,模拟在0 Nm、2 Nm、4 Nm、6 Nm和8 Nm转矩下的转速控制情况,如图7所示。
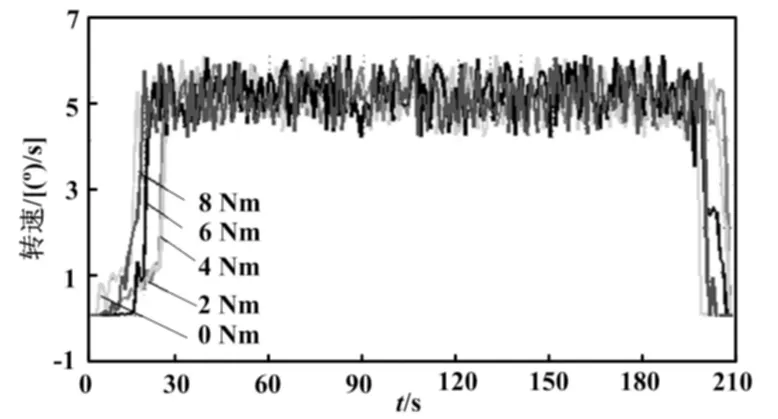
图7 转速控制情况示意图
测量结果表明,控制器可以较好地稳定在设定的
转速附近。由于海德汉编码器精度较高,对噪声较为敏感,测量结果中存在一定噪声误差。
4 结束语
针对EAST遥操作检修机械臂上刷式直流电机的位置和速度控制,本文设计了一种采用磁编码器AS5311的伺服控制器。该控制器可对单个直流电机进行伺服控制,具有以太网、CAN总线等接口,可实现刷式直流电机的精密控制,并适用于不同负载的工作状况。通过搭建的试验平台进行验证,证明该系统具有很好的效果,可以应用在多关节检修机械臂。对于多关节联合点位运动,采用梅花链串联多个控制单元。该方法控制方便、操作简单,但实时性较差,无法实现协调轨迹运动。后续将针对EAST平台多关节检修机械臂系统开展相关研究,以实现多关节机械臂的实时运动控制。
[1] 屈云飞,陈卫东,曹其新. 面向托卡马克第一壁检测的超冗余机械臂运动学分析[J]. 上海交通大学学报,2014,48(7):922-928.
[2] KELLER D,BAYETTI P,BONNEMASON J,et,al.Real time command control architecture for an ITER relevant inspection robot in operation on Tore Supra[J]. Fusion Engineering and Design,2009,84(2-6):1015-1019.
[3] LAURENT G,PASCAL B,VINCENT B,et al. Operation of an ITER relevant inspection robot on Tore Supra tokamak[J]. Fusion Engineering and Design,2009,84(2-6):220-223.[4] 潘再平,芦思晨,刘峙飞.基于PWM 整流器的电机控制器老化测试系统[J]. 电机与控制学报,2013,17(11):8-12.
[5] 李凤祥,朱伟进.无刷直流电机双模控制技术研究与应用[J].电机与控制学报,2013,17(3):70-75.
[6] 孙冠群,蔡慧,牛志钧,等.无刷直流电动机转矩脉动抑制[J].电机与控制学报,2014,18 (11):51-58.
[7] 杨巧玲,郝晓弘,张海平. 无刷直流电机的新型控制器[J]. 自动化仪表,2008,29(9):13-15.
[8] 严平锋,凌志浩,蒋炜. 步进电机的控制与检测系统的设计与实现[J]. 自动化仪表,2014,35(4):38-42.
[9] 庞向坤,姚福安,魏欢欢. 基于DSP的无刷直流电机测试系统的设计[J]. 自动化仪表,2008,29(7):53-56.
[10]杨耕,罗应立. 电机与运动控制系统[M].北京:清华大学出版社,2014:110-114.
Design and Experiment of DC Motor Control System Using Magnetic Encoder
In order to control the position and speed of the brushed DC motor on the articulated inspection arm(AIA) of Experimental Advanced Superconducting Tokamak (EAST),a servo controller using the magnetic encoder AS5311 is designed.The DSP28035 and DRV8840 chips of TI are used to achieve control of brushed DC motor; in accordance with the established mathematical control model of DC motor,the position and speed dual closed loop PID control strategy is designed. The simulation model of control system is built through Matlab/Simulink,and the parameters of the model are optimized. With magnetic powder brake as the emulated load,the test platform of DC motor is constructed for experimental verification. The result shows that the controller can achieve position and speed control for DC micro motor with better control effects.
DC motor Magnetic encoder Controller PID control DSP Closed-loop control Motor Model Test platform Nuclear power Thermonuclear fusion
上海市科学技术委员会基金资助项目(编号:13DZ2280700);
上海市经济和信息化委员会基金资助项目(编号:15QB1401400);
上海复果金属构件增材制造工程技术中心基金资助项目(编号:4DZ2253600)。
袁茂强(1989—),男,2014年毕业于哈尔滨工业大学仪器仪表专业,获硕士学位,设计师;主要从事多自由度机器人自动控制方向的研究。
TH7;TP23
A
10.16086/j.cnki.issn 1000-0380.201608006
修改稿收到日期:2016-02-18。
猜你喜欢
大电机技术(2022年5期)2022-11-17
网络安全与数据管理(2022年1期)2022-08-29
汽车实用技术(2022年12期)2022-07-05
煤气与热力(2021年12期)2022-01-19
制造技术与机床(2017年7期)2018-01-19
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
中国光学(2015年5期)2015-12-09
筑路机械与施工机械化(2014年4期)2014-03-01