
直线超声波电动机在精密平台中应用的现状
2016-11-25 08:57:33孙向磊郭丽娜吕宏伟
微特电机 2016年4期
孙向磊,郭丽娜,吕宏伟
(航天动力技术研究院 西安航天化学动力厂,西安 710025)
直线超声波电动机在精密平台中应用的现状
孙向磊,郭丽娜,吕宏伟
(航天动力技术研究院 西安航天化学动力厂,西安 710025)
尖端工业生产领域需要精密平台为其提供技术支持。对各国的先进直线超声波电动机驱动的精密平台的原理、性能和应用作了初步介绍,并与上海大学研制的短、小、薄超声波电动机精密平台作对比。通过分析它们的特点,为我国的直线超声波电动机驱动控制精密平台的开发研究提供建议和参考。
精密平台;直线超声波电动机;定位精度
0 引 言
近些年,纳米级操作技术已成人类进入微观世界的关键技术,成为各国科学研究工作中急需解决的重要组成部分。超耐久性、高精度、远行走距离的超精密工作台系统在这个领域内占有极为重要的地位。在细微装配、微型设备、大规模集成电路板生产加工、精密仪器测量加工、细胞领域精密操纵等研究项目中,精确的定位和特别精细的操作是迫切需要的,由此可见超精密定位工作台为这些研究领域提供必需的技术支持。工作台的运动控制、运动加速度及起动和停止过程中达到稳定状态所耗时间又影响了工作效率, 成为工作台系统的参考指标。另外,精密平台的载重、振动、控制等技术指标参数决定了我国在高技术领域研究水平的参考标志。最早的精密定位平台是由直线导轨、步进电机和滚珠丝杠,由于滚珠丝杠的回程间隙和步进角的限制,其定位精度并不高[1-4]。
1 超声波电动机的优点
自上世纪80 年代后,出现了一种新型的微电机——超声波电动机,它和普通电机不同,普通电机需要电机定子和动子绕组和磁运行回路,而超声波电动机不需要。超声波电动机而是利用压电陶瓷制作的压电元件的逆压电效应把具有弹性变形能力的微小形变,通过放大机制和两种或几种物体的摩擦耦合组合成为物体的宏观运动。超声波电动机和以前的电磁电机相比,更适合作为精密平台的驱动电机,有以下优点:(1)不产生磁场、不受磁场影响;(2)低速大力矩和无噪声;(3)响应快和断电自锁;(4)结构简单,扭矩/重量比大,并且电机的形状可以多样化[5]。
直线超声波电动机作为驱动电机可通过电机顶部的摩擦头直接驱动平台,而不必再采用旋转运动转变成直线运动的机械结构,从而减小了不必要的误差,并且平台可以设计成一级进给的机构,可同时满足大行程、高精度、高响应度。
2 国内外开发的精密平台
作为精密平台驱动的超声波电动机,其结构形式和模态是多种多样的,国外已开发出多种,大致可分为共振式和非共振式,共振式又可以分为多模态和单一模态。
2.1 共振式单一模态
2.1.1 单点接触驻波式
如图1所示,通过超声波把振子激励成一种单纯的驻波运动模式。在振子部位按照一定的间隔和配比方式加工出一定数量的齿,由于振子齿相对于驻波波峰的相对位置的不同,从而形成左斜方向或右斜方向的碰撞,宏观运动结果就是推动动子沿单向直线行进。图2是驻波型直线超声波电动机的工作原理。如果导轨不动,让振子做相对运动,图2(a),图2(b)示出了振子运动的两种工作模态(由软件分析得出)。在图2(a)中,振子齿的位置是在波腹运动的左侧,振子齿端位移见图,上方振子齿相对于导轨施加左斜向上的碰撞和摩擦力,下方振子齿相对于导轨施加左斜和向下的碰撞和摩擦力,导轨和振子通过预压力紧贴在一起,导轨向振子施加反作用力,推动振子向右运动;同样,在图2(b)中,振子齿相对于驻波波腹的位置是右侧,从而振子向左运动。该设备的关键是根据运动模态设定齿的相对位置,同时在一个运动模态中一个波峰(或者是波谷)的左面,同时在另外一个运动模态同一个波峰(或者是波谷)的右面。该研究的是直梁式直线超声波电动机,它的前进运动和后退运动分别在两个不同的模态下工作,此种结构必须要求运动换向时改变激振频率以激发出不同阶次的振动模式和振型[6]。

图1 共振式单一模态精密平台
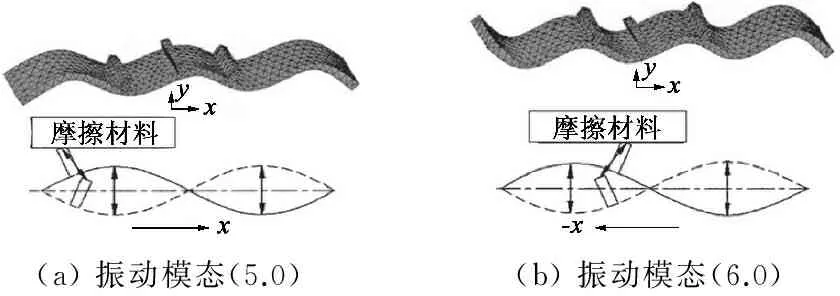
(a)振动模态(5.0)(b)振动模态(6.0)
图2 驻波式直线电动机工作原理
图3是新加坡南洋技术大学研制的一种精密平台,电机是一种振子作为动子的直线超声波电动机,这种电机具有简单紧凑的特点。行程为220 mm,行程主要取决于直线导轨的长度,无负载时的速度可达80 mm/s,负载300 g的速度可达23 mm/s,自锁力6.9 N,起动力4.9 N,分辨率小于50 nm,起动时间为12 ms[7]。
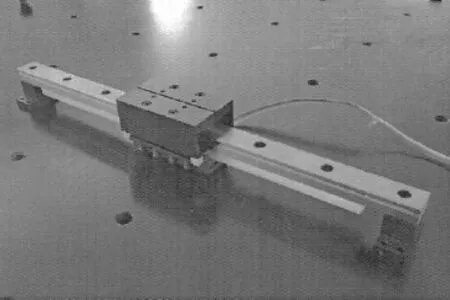
图3 精密平台工作图
国内浙江大学也开展了类似的驻波模态直线超声波电动机研究。同样是利用设定振子的B3,B4阶不同弯曲模态,实现正向和反向行进,该结构的超声波电动机国内外都有类似研究[8]。
2.1.2 多点接触驻波式
德国Pi公司2006年设计出了如图4所示的多点接触驻波式直线型超声波电动机。该直线电动机的定子是一块压电陶瓷板,两个滑块通过弹簧压在定子上,动子可以沿着定子的沟槽做直线运动。在压电陶瓷板上沿着厚度方向覆盖电极,上面覆盖两个电极,下面覆盖一个电极,通过激发压电陶瓷的E(3,1)振动模态,使定子的沟槽产生变形,在动子与定子接触的各个点的合力下,动子沿着沟槽做直线运动,通过切换上面覆盖的两个电极来改变动子的运动方向。该电机的尺寸为9 mm×4 mm×1.5 mm,行程3.2 mm,开环最大运行速度100 mm/s,闭环速度也可以达到几厘米每秒;可承受负载0.6g,驱动电压为2.8~3.2 V[9]。
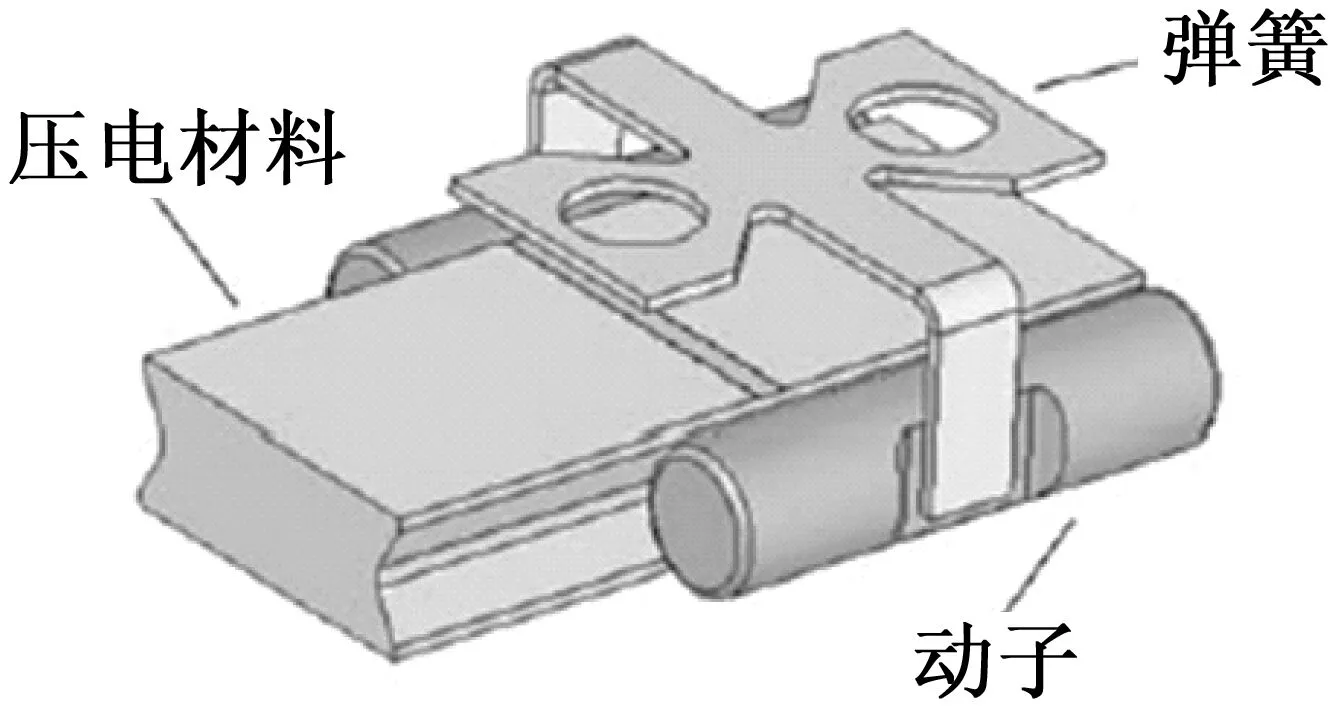
图4 Pi公司直线电机原理图
2.2 共振式双模态
2.2.1 双纵向驻波式
图 5是国立高雄应用科技大学研究开发的一种双纵向驻波式直线超声波电动机。图中所示电机是由一个椭圆形的金属弹性椭圆体、两边是积层型的压电致动器和底座组成。通过正弦波电压激励压电致动器,使其能够产生周期性的微小形变,进而使椭圆形金属弹性体产生相应变形,并且能够让弹性体上的定子在其作用点上形成椭圆形的运动。通过定子上产生足够大小的椭圆形的运动形变,就可以施加正向力,把定子上的椭圆形形变转换成为滑台上的宏观直线运动[10]。此超声波电动机是利用两个具有相位差的电压去激发两个压电材料的纵向振动,实现圆环结构上的作用点产生切向与法向的振动运动[11]。图6是椭圆形定子超声波电动机的工作图。

图5 椭圆形定子原理图图6 工作图
2.2.2 纵扭双模态
以色列Nanomotion公司所制造的双模态超声波电动机是目前商业化的驻波型超声波电动机之一。如图7所示,经由通常设计电压定子之长宽比,将可使压电块仅利用单一频率的弦波电压同时激发第一个纵向模态(L1)和第二个弯曲模态(B2)。当在左上角及右下角电极加上一弦波电压,而其频率接近B2与L1的共振频率时,则压电块的顶端将会有近似圆形或椭圆形的轨迹出现,利用此轨迹并经由摩擦头通过摩擦接触面将有效地使平台产生平移。而在右上角及左下角电极加上弦波电压将可得到反向运动[12]。
图7是 Nanomotion 公司生产的单驱动头驻波型压电直线电动机原理图。参数如下:工作台尺寸380 mm×380 mm×225 mm;最大速度(无负载)250 mm/s;加速度0~0.1g;步进时间小于270 ms;最大输出推力3.5~4.5 N;刚度0.8~1 N/μm;分辨率优于100 nm(视应用情况);名义预紧力18 N。
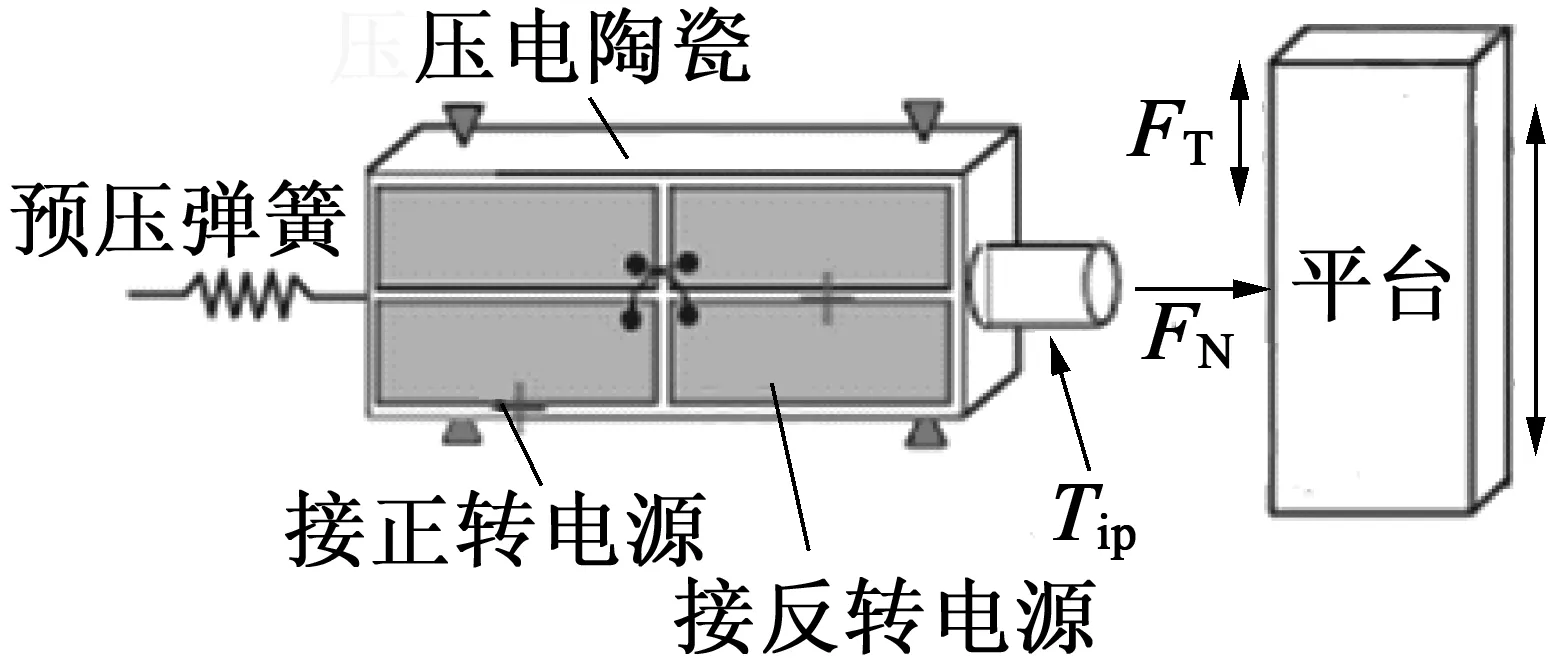
图7 驻波型压电直线电动机
可以通过增加电机的驱动头数来提高电机的输出推力和刚度[13]。
2.3 非共振双模态
日本的Shinji Takada, Hiroyuki Hashiguchi等人研究开发了一种双模态非共振的压电驱动器,如图8所示[15]。这种电机的驱动频率因为不是工作在压电陶瓷的共振区域,所以该超声波电动机的驱动频率可以在很大的范围内调节。该电机是利用弯曲模态和伸缩模态两种运动模态,在振动齿端形成椭圆形变,两支撑点周期交替运动。该驱动器设计合理,工作可靠,行程为100 mm,在平均加速度为2 200 mm/s2的情况下最大的进给速度可以达到140 mm/s,在闭环控制的情况下,在0.35 s内可实现100 nm的步进和0.69 nm的定位精度。
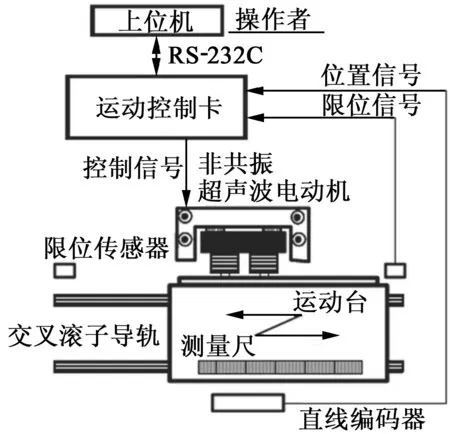
图8 双模态直线电机驱动的精密平台
2.4 多模态耦合与单模态触发
国内上海大学机器人研究所研发的扁平式XY平面运动型平台如图9所示,利用多模态耦合实现了平台的精密移动。它采用多片压电片驱动,克服了传统的气浮式运动平台由于缺少运动阻尼从而导致系统抗干扰能力的降低带来的后续问题。同时,上海大学还开发了三角形大推力低矮式直线超声电机,如图10所示。它采用单模态触发模式,用三角形结构放大压电片的振幅和推力来完成直线运动。
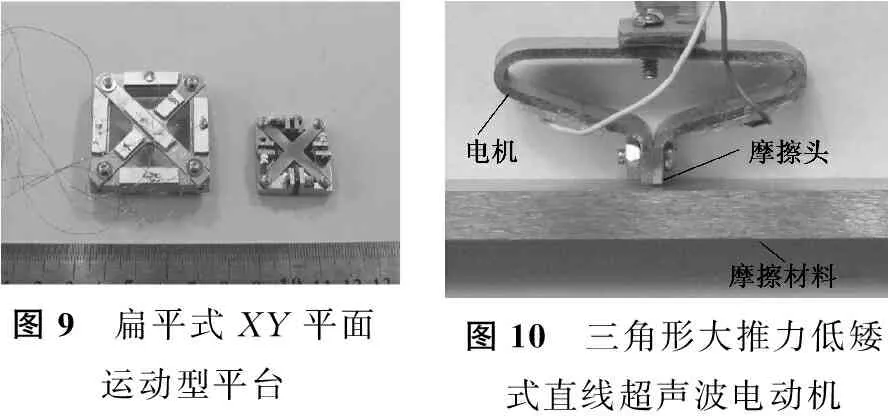
图9 扁平式XY平面运动型平台图10 三角形大推力低矮式直线超声波电动机
3 总结与展望
由以上综述来看,目前国内研制的直线型超声波电动机运动精密平台运动行程较短,行程在几十毫米到几百毫米的精密平台研制较少,运动速度也较低。但从以后的实际应用和工业需求来看,速度低、行程小的精密工作台有较大局限性,难以满足一些对精密程度要求日益增高的工程需要。随着细微装配、微型设备、大规模集成电路板加工、精密仪器测量加工、细胞领域精密操纵等研究的发展。发展高速、大行程、高精度工作台是现在迫切需要解决的。
[1] EGASHIRA Y,KOSAKA K,ENDO T,et al.Development of nonresonant ultrasonic motor with sub-nanometer resolution[C]//IEEE Ultrasonics Symposium,2002:637-640.
[2] 吴鹰飞,周兆英.超精密定位工作台[J].微细加工技术,2002,(2):41-47.
[3] HASHIMOTO S,OHISHI K,OHISHI T,et al.Development of an ultra-precision stage control system using nonresonant ultrasonic motor[C]//IEEE Ultrasonics Symposium,2003:1331-1336.
[4] 张晓峰, 林彬.大行程纳米级分辨率超精密工作台的发展方向[J].南京航空航天大学学报,2005,37(S1):179-183.
[5] 白永明,纪跃波,黄卫清.基于超声波电动机的X-Y精密定位工作台[J].机电技术,2007,30(1):37-39.
[6] 关亮.方环形直线驻波超声波电动机的研究[D].锦州:辽宁工学院,2007.
[7] LIM C K,HE Siyuan.A piezo-on-slider type linear ultrasonic motor for the application of positioning stages[C]//Intntemational Conferenceon Advanced Intelligent Mechatmnics,Atlanta,USA,1999:103-108.
[8] 钱孝华,郭吉丰,伍建国.双向驻波型直线超声波电动机[J].微特电机,2007,35(8):26-28.
[9] SPANNER K,VYSHNEVSKYY O,WISCHNEWSKIY W.New linear ultrasonic micromotor for precision mechatronic systems[R].Germany:Physik Instrumente,2006.
[10] HO S-T.Modelling of the linear ultrasonic motor using an elliptical shape stator[C]//IEEE 3rd International Conference on Mechatronics,2006:82-87.
[11] 苏艳文.薄板面内振动直线型超声波电动机及其驱动电路的设计[D].南京:南京航空航天大学,2007.
[12] 蔡孟勋,李玉忠.超音波马达之简介与动态建模[J].压电致动,2003,(14):22-25.
[13] 刘俊标,薛虹,顾文琪,等.微纳加工中的精密工件台技术[M].北京:北京工业大学出版社,2004.
[14] EGASHIRA Y,KOSAKA K,ENDO T,et al.Development of nonresonant ultrasonic motor with sub-nanometer resolution[C]//IEEE ultrasonics symposium,2002:637-640.
[15] EGASHIRA Y,KOSAKA K,TAKADA S,et al.0.69 nm resolution ultrasonic motor for large stroke precision stage [C]//IEEE-NANO,2001:397-402.
Present Situation of the Linear Ultrasonic Motor Application in the Precision Stage
SUNXiang-lei,GUOLi-na,LÜHong-wei
(Xi'an Aerospace Chemical Propulsion Plant,CASC,Xi'an 710025,China)
The precision stage provides the technical support for the sophisticated industry field. This paper makes the initial introduction on principles, properties and application of precision stages driven by the linear ultrasonic motor, and makes the contrast with the short, small and thin linear ultrasonic motor precision stage of Shanghai University. Through analyzing their characteristics, this paper provides reference for research and development of the linear ultrasonic motor precision stages in our county.
precision stage; linear ultrasonic motor; positioning accuracy
2015-04-25
TM359.9
A
1004-7018(2016)04-0071-04
孙向磊(1981-),男,硕士研究生,工程师,研究方向为航天动力设备自动控制。
猜你喜欢
数学年刊A辑(中文版)(2021年1期)2021-06-09 09:31:48
中学生数理化·自主招生(2021年8期)2021-05-30 10:48:04
压电与声光(2019年1期)2019-02-22 09:46:06
铜仁学院学报(2018年6期)2018-07-05 09:47:40
数学物理学报(2018年1期)2018-03-26 08:16:58
电测与仪表(2016年18期)2016-04-11 11:30:30
西部广播电视(2015年9期)2016-01-18 03:46:04
物理实验(2015年10期)2015-02-28 17:36:55
振动、测试与诊断(2014年6期)2014-03-01 01:14:55
振动、测试与诊断(2014年6期)2014-03-01 01:14:49
