一种新型10/4开关磁阻电机电磁力分布及其振动特性研究
2016-11-23 07:38邓长征吴训松王康熙
三峡大学学报(自然科学版) 2016年5期
邱 立 肖 遥 邓长征 吴训松 肖 东 刘 萌 王康熙
(1. 三峡大学 电气与新能源学院, 湖北 宜昌 443002;2. 三峡大学 梯级水电站运行与控制湖北省重点实验室,湖北 宜昌 443002;3. 三峡大学 科技学院,湖北 宜昌 443002)
一种新型10/4开关磁阻电机电磁力分布及其振动特性研究
邱 立1,2肖 遥1,2邓长征1,2吴训松1,2肖 东1,2刘 萌3王康熙3
(1. 三峡大学 电气与新能源学院, 湖北 宜昌 443002;2. 三峡大学 梯级水电站运行与控制湖北省重点实验室,湖北 宜昌 443002;3. 三峡大学 科技学院,湖北 宜昌 443002)
径向电磁力是导致开关磁阻电机振动和噪声的主要原因之一.为此,本文提出了一种新型五相10/4开关磁阻电机的本体结构,通过增加定子极对数以增大气隙磁通和电磁转矩,通过提前关断定子绕组励磁电流以减小径向电磁力.同时建立了这一新型开关磁阻电机的电磁有限元模型,仿真结果表明,在同样的励磁条件下,新型开关磁阻电机的电磁转矩较传统开关磁阻电机增大了51.7%,同时其径向电磁力却降低了45.3%.进一步分析了励磁绕组导通与关断时刻对电机的影响程度;提前2°左右机械角关断励磁绕组电流,能在保证电磁转矩输出的基础上较大程度地减小开关磁阻电机的径向电磁力.最后,仿真验证了这一新型开关磁阻电机结构减振降噪的效果.
开关磁阻电机; 电磁力分布; 关断角; 振动特性
开关磁阻电机(switched reluctance motor, 简称SRM或SR电机) 为双凸极结构,是一种新型可变速驱动系统.与传统电机相比,SRM具有结构简单,成本低,调速性能好等优点[1-4].因此,SRM目前已经被广泛地应用于电动车辆、矿山、油田、纺织机械等工业领域[5-7].然而,在SRM的研究中发现,其噪声和振动问题严重,限制了它在某些场合的推广应用[8-11].研究表明,作用于定子上的径向力是引起噪声和振动的主要原因[12-15].文献[16]设计出一种半消声室来隔绝噪声,然而半消声室的使用存在局限性,且该方法不能从根本上解决振动问题.文献[17]通过将开关磁阻电机的齿极设计为倾斜结构,以达到平缓径向电磁力的效果,进而实现降噪减振的目的.但该方法对于机械设计的精确性要求较高.文献[18]在转子上设置无填充物圆环孔洞,基于磁导率理论减小径向力幅值,从而减小振动噪声.但是圆孔将会使应力集中问题更加凸显,对于转子结构会有不利的影响.文献[19]通过增加辅助线圈的方法实现降噪减振,然而由于强绕组耦合的存在,电机的可靠性有所降低,容错能力下降.文献[20]提出了一种轴向式开关磁阻电机,用以提高电磁转矩.却没有进一步论述减小径向力的方法.无法达到减振降噪的目的.文献[21]提出了提前导通和提前关断理论.但分析数据仅适用于该文所对应的特定模型,且该文献没有分析导通角和关断角的具体取值范围.
本文设计出一种新型五相10/4 SRM结构.通过增加定子极对数以增加气隙磁通和电磁转矩,进一步通过数据分析,明确提前导通和提前关断范围,即当提前2°左右关断定子绕组励磁电流时,既能保证较大的电磁转矩输出能力,又能有效减小振动和噪声.最后通过响应分析仿真验证其效果.
1 基本原理与电机结构
1.1 基本原理
开关磁阻电机的静转矩可以通过其磁场储能或磁共能对转子位置角的偏导数求得,即
(1)

在电机磁路不饱和的情况下,即假定磁路是线性的情况下,则
(2)
式中,Wm表示整个磁场的磁能;Ψ和L分别表示导通相绕组的磁链和电感.
进而得到转矩T的计算公式:
(3)


图1 SRM的工作原理
图1(a)是A相绕组的电感LA(θ)曲线,当定子极轴线与转子槽轴线重合时电感最小,定义此时θ=0°;当定子极轴线与转子极轴线重合时电感最大,此时刻θ=45°机械角(电角度为180度).在此基础上,进一步根据各相绕组导通时间(如图1(c))的不同最终得到开关磁阻电机的合成转矩(如图1(d)).本文按照这一基本思路研究新型SRM电磁力的分布规律.
1.2 电机结构
传统SRM中,通常在定子极轴线与转子极轴线重合时进行换向,此时径向电磁力达到最大值,故造成运行时SRM噪声与振动较大.为此,本文提出五相10/4新型SRM的本体结构设计方法,新型SRM结构示意图如图2所示.通过增加定子极对数以增大气隙磁通和环向电磁力,同时通过提前导通和提前关断定子绕组电流以减小径向电磁力,这样既能增加SRM的电磁转矩,又能减小SRM的振动与噪声.

1.定子;2.转子;3.定子磁极;4.转子磁极;α.定子绕组轴线与最近转子磁极轴线之间的夹角图2 五相10/4新型SRM结构示意图
2 电磁力分布特性
这一新型SRM能否达到减振降噪的效果,关键在于其能否有效减小径向电磁力.为此,本文建立了传统SRM与新型SRM的有限元模型,分别分析了这一组对比模型的电感、转矩及径向电磁力分布规律,验证新型SRM的合理性.
通过ANSYS仿真软件建立1/2对称模型,并将对称面边界条件设为周期对称边界;定、转子材料采用B-H曲线施加,其他区域相对磁导率设置为1;励磁绕组施加直流载荷,并依据转子位置不同而施加在不同的励磁绕组上.本算例中,传统开关磁阻电机定子极对数为3,转子极对数为2;新型开关磁阻电机定子极对数为5,转子极对数同样为2.新型SRM几何模型及网格划分如图3所示.
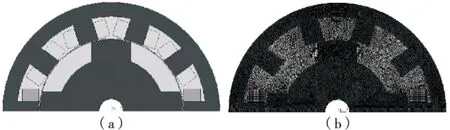
图3 新型SRM几何模型及网格划分
SRM的电感依据电磁能量法求得,即通过有限元分析得到整个区域内的磁能,再依据加载的电流值最终确定电感值.电磁转矩通过ANSYS宏命令TORQSUM获取,径向电磁力则需要通过获取相关力的数据之后进行坐标转换得到.
根据前述基本原理,首先分析了一个电周期内SRM的电感变化规律,如图4所示.SRM电感最大值出现在电角度为0附近,最小值出现在电角度为180度附近;电感快速下降区域出现在电角度30~90范围内,电感快速增大区域出现在电角度270~330范围内.前述原理表明,电角度与机械角度满足Nr倍(定子极对数)关系;因新型SRM定子极对数为5,一个电周期内实际转过的机械角度为72°;此时定、转子之间的相对距离更短,所以其电感上升或下降区域出现更为陡峭的变化.
电感的分布直接影响SRM的电磁转矩,SRM的电磁转矩主要由其电感随空间位置的变化决定,其具体分布规律如图5所示.在电感变化率较小的区域(电角度120~240度)内,SRM的电磁转矩几乎为0;在电感下降最快的区域,SRM的电磁转矩为负;而在电感上升最快的区域,SRM的电磁转矩为正,转矩正向区域即为SRM正常工作区间.同时,因为新型SRM的电感变化率更大,因而在相同的励磁条件下能获取更大的电磁转矩,电磁转矩增幅为传统SRM的51.7%.

图4 一个电周期内SRM电感变化规律
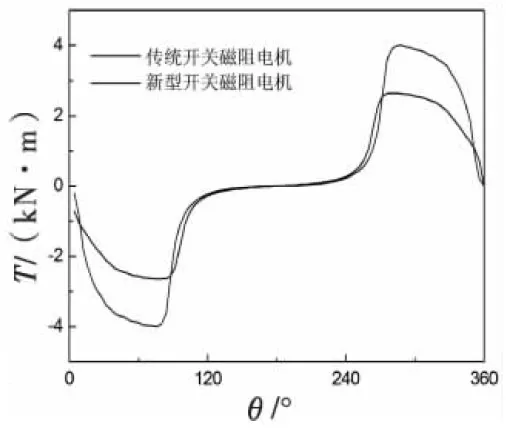
图5 一个电周期内SRM转矩变化规律
为验证新型SRM径向力的分布情况,进一步分析了一个电周期内SRM径向电磁力的分布规律,如图6所示.结果表明,与传统SRM相比,新型SRM在获取51.7%电磁转矩增幅的同时,其径向电磁力的幅值亦降低45.3%.该结果充分说明了新型SRM性能指标的优越性.
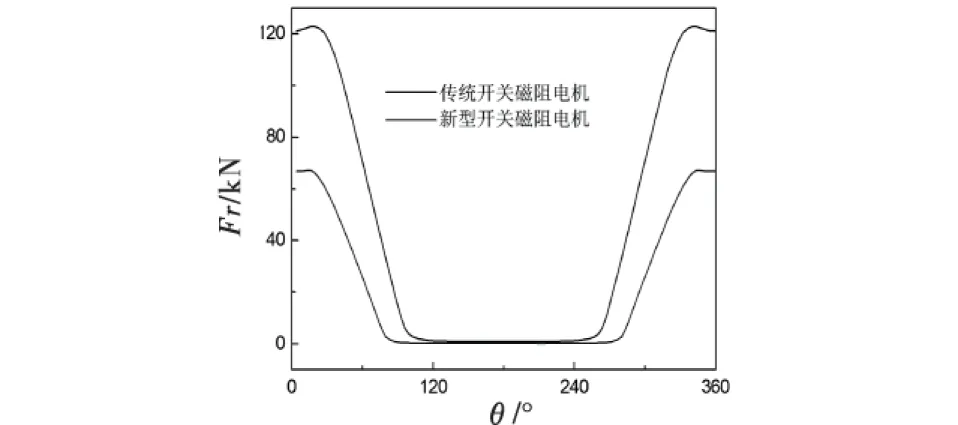
图6 一个电周期内SRM径向电磁力分布
在分析单相加载、单周期SRM电磁转矩与径向电磁力分布规律的基础上,结合SRM励磁特点,进一步研究了多相加载时SRM整体运行时的电磁转矩与径向电磁力分布特性.为更为清晰地反应传统SRM与新型SRM电磁转矩与径向电磁力分布的差异,图7给出了这两者之间的对比分析结果.红色线条代表新型SRM,黑色线条代表传统SRM;可以看出,新型SRM具有更大的电磁转矩能力和更小的径向电磁力,综合性能更高.
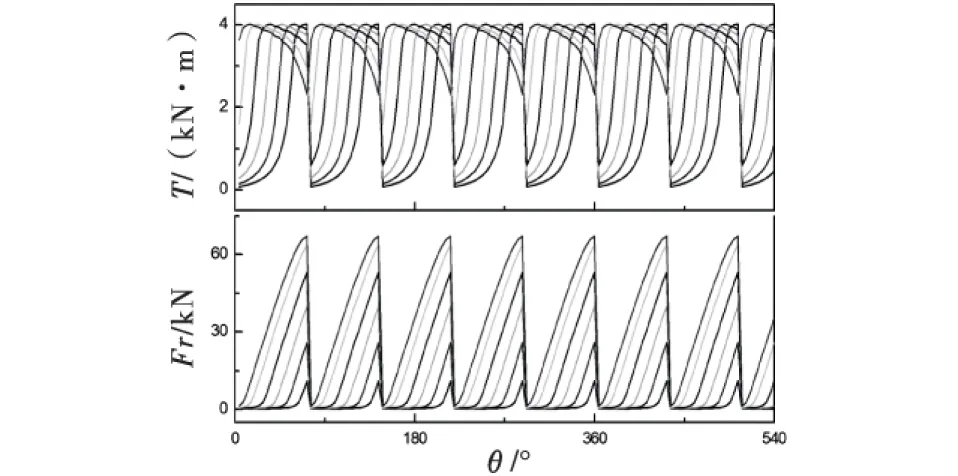
图7 两种SRM电磁转矩与径向电磁力对比
3 励磁绕组导通与关断时刻研究
影响新型SRM电磁转矩与径向电磁力的因素众多,其中励磁绕组导通与关断时刻对电磁转矩和径向电磁力的影响较为严重.因新型SRM定子极对数多,一个电周期内转过的机械角相对较小,这就为提前关断励磁绕组提供了便利条件.图8为励磁绕组关断角与电磁转矩及径向电磁力的关系,其中黑色线条、红色线条、绿色线条、蓝色线条、青色线条及紫色线条分别表示励磁绕组提前14°、11°、8°、5°、2°及0°机械角关断时的电磁转矩与径向电磁力变化规律.可以看出,提前关断时,由于此时定子极轴线与转子极轴线还有一定的距离,故导致电磁转矩明显减小;同时,因为这一时刻定子极轴线与转子极轴线夹角较大,相应的电磁力以环向为主,故提前关断角增大时径向电磁力亦减小.
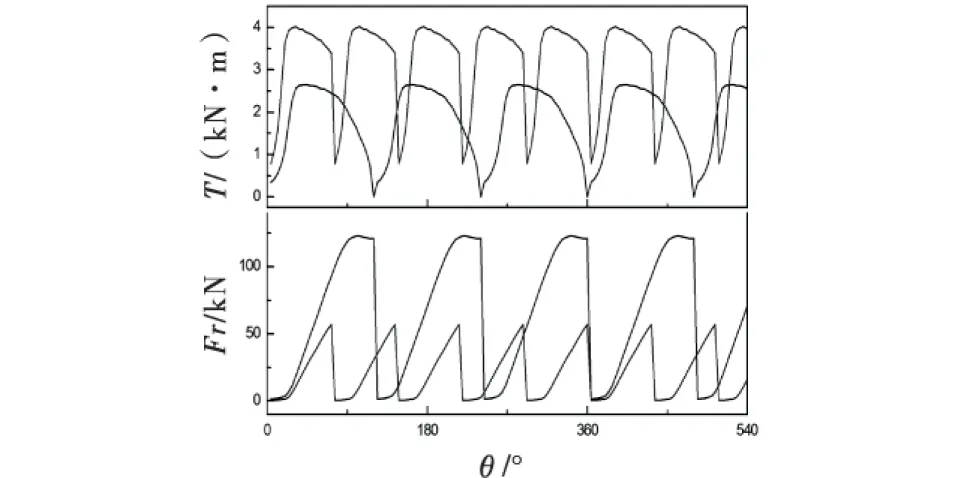
图8 励磁绕组关断角与电磁转矩及径向电磁力的关系
为寻求合适的关断角,依据图8所获得的数据,计算得到不同关断角下的平均电磁转矩及平均径向电磁力,如图9所示.结果显示,在提前关断角处于2~12°之间时,平均电磁转矩、平均径向电磁力与励磁绕组导通角几乎成线性关系,且其变化率亦较为接近.但在关断角小于2°时,径向电磁力随着励磁绕组导通角的减小而迅速增大,而电磁转矩在这一范围内变化并不明显.这与实际运行情况较为符合,因为当定子极轴线与转子极轴线即将重合之时,SRM以径向电磁力为主.这一研究表明,可提前2°左右关断励磁绕组电流,这样既能保证较为理想的电磁转矩输出,又能较大地减小开关磁阻电机的径向电磁力.
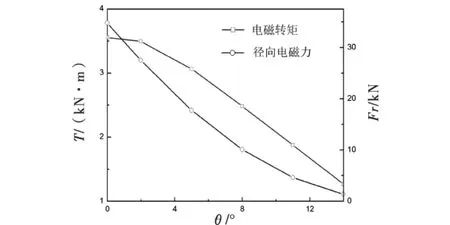
图9 励磁绕组关断角与平均电磁转矩及平均径向电磁力的关系
4 径向电磁力激励下的响应分析
为验证新型SRM对于减振降噪的效果,将传统SRM与新型SRM进行对比,分析传统SRM与新型SRM在径向电磁力激励下的响应情况.分析中,加载前述分析得到的径向电磁力到定子磁极,因电机正常时仅有一组励磁绕组通电,选择模型中的水平对极作为加载对象.图10即为传统SRM和新型SRM在径向电磁力激励下的响应情况.对于传统SRM而言,其一阶、二阶及三阶响应的最大位移分别为2.92×10-2mm、4.83×10-2mm、8.41×10-1mm;对于新型开关磁阻电机而言,其一阶、二阶及三阶响应的最大位移分别为1.30×10-2mm、2.89×10-2mm、1.02×10-1mm.以最容易发生的一阶响应为例,新型SRM的最大位移较传统SRM的最大位移小55.48%,这一结果有力地验证了新型SRM结构减振降噪的效果.
5 结 论
本文通过有限元方法,对比分析了新型10/4 SRM与传统6/4 SRM电磁力分布,研究了新型SRM关断角对电磁力的影响.结果表明,在同样励磁条件下,新型SRM的电磁转矩比传统SRM的电磁转矩增大了51.7%,同时其径向电磁力降低了45.3%.此外,当提前2°左右机械角关断励磁绕组电流时,能在保证电磁转矩输出的基础上较大程度地减小开关磁阻电机的径向电磁力.最后通过对比分析传统SRM与新型SRM的振动特性,以最容易发生的一阶响应为例,新型SRM最大位移量较传统SRM最大位移量小55.48%,验证了这一新型SRM结构减振降噪的效果.总体而言,新型SRM具有更大的电磁转矩输出能力和更小的径向电磁力,能有效达到减振降噪的目的.
[1] 李 洋,王德明,张广明,等.轴向磁场开关磁阻电机系统的故障分析[J].电机与控制应用,2014,41(12):43-47.
[2] 夏长亮,陈自然,李 斌.基于RBF神经网络的开关磁阻电机瞬时转矩控制[J].中国电机工程学报,2006,26(19):127-132.
[3] 漆汉宏,张婷婷,李珍国,等.基于DITC的开关磁阻电机转矩脉动最小化研究[J].电工技术学报,2007,22(7):136-140.
[4] 周云红,孙玉坤.一种双定子型磁悬浮开关磁阻起动/发电机的运行原理与实现[J].中国电机工程学报,2014,34(36):6458-6466.
[5] 张 鑫,王秀和,杨玉波,等.基于转子齿两侧开槽的开关磁阻电机振动抑制方法研究[J].中国电机工程学报,2015,35(6):1508-1515.
[6] 谭 平,瞿遂春,马世伟.开关磁阻电机减振降噪技术研究[J].湖南工业大学学报,2010,24(3):66-69.
[7] 孙剑波,詹琼华,王双红,等.开关磁阻电机减振降噪和低转矩脉动控制策略[J].中国电机工程学报, 2008, 28(12):134-138.
[8] Matsui R, Nakao N, Akatsu K. Torque/Current Ratio Improvement and Vibration Reduction of Switched Reluctance Motors Using Multi-stage Structure[C]. 2014 International Power Electronics Conference (IPEC-Hiroshima 2014-ECCE ASIA), Hiroshima, 2014, 1128-1134.
[9] 孙剑波, 詹琼华, 黄 进. 开关磁阻电机的定子振动模态分析[J]. 中国电机工程学报, 2005, 25(22):148-152.
[10] Liang X, Li G, Ojeda J, et al. Comparative Study of Classical and Mutually Coupled Switched Reluctance Motors Using Multiphysics Finite-Element Modeling[J]. IEEE Transactions on Industrial Electronics, 2014, 61(9):5066-5074.
[11] Sun W, Li Y, Huang J, et al. Vibration Effect and Control of In-Wheel Switched Reluctance Motor for Electric Vehicle[J]. Journal of Sound & Vibration, 2015, 338:105-120.
[12] Cameron D E, Lang J H, Umans S D. The Origin and Reduction of Acoustic Noise in Doubly Salient Variable-Reluctance Motors[J]. IEEE Transactions on Industry Applications, 1992, 28(6):1250-1255.
[13] Anwar M N, Husain I. Radial Force Calculation and Acoustic Noise Prediction in Switched Reluctance Machines[J]. Industry Applications IEEE Transactions on, 2000, 36(6):1589-1597.
[14] Abbasian M, Moallem M, Fahimi B. Double-Stator Switched Reluctance Machines (DSSRM):Fundamentals and Magnetic Force Analysis[J]. IEEE Transactions on Energy Conversion, 2010, 25(3):589-597.
[15] Fiedler J O, Kasper K, De Doncker R W. Calculation of the Acoustic Noise Spectrum of SRM Using Modal Superposition[J]. IEEE Transactions on Industrial Electronics, 2010, 57(9):2939-2945.
[16] Salvado J A, Calado M R, Espirito Santo A E. A Simple yet Effective Semi-Anechoic Chamber for the Acoustic Characterization of an LSRA[J]. Latin America Transactions IEEE, 2013, 11(5):1190-1200.
[17] Zou Y, Cheng K W E, Cheung N C, et al. Deformation and Noise Mitigation for the Linear Switched Reluctance Motor With Skewed Teeth Structure[J]. IEEE Transactions on Magnetics, 2014, 50(11):1-4.
[18] Li J, Sun H, Liu Y. New Rotor Structure Mitigating Vibration and Noise in Switched Reluctance Motor[C]. 2010 International Conference on Information, Networking and Automation (ICINA), Kunming, 2010:80-84.
[19] Hasegawa Y, Nakamura K, Ichinokura O. A Novel Switched Reluctance Motor With the Auxiliary Windings and Permanent Magnets[J]. Magnetics IEEE Transactions on, 2012, 48(11):3855-3858.
[20] Arihara H, Akatsu K. Basic Properties of an Axial-Type Switched Reluctance Motor[J]. IEEE Transactions on Industry Applications, 2013, 49(1):59-65.
[21] Kotegawa T, Miki I. Stator Structure for Reducing Noise in Switched Reluctance Motor[C]. Power Electronics and Applications (EPE), 2013 15th European Conference on, Lille, 2013: 1-9.
[责任编辑 张 莉]
Research on Electromagnetic Force Distribution and Vibration Performance of A Novel 10/4 Switched Reluctance Motor
Qiu Li1,2Xiao Yao1,2Deng Changzheng1,2Wu Xunsong1,2Xiao Dong1,2Liu Meng3Wang Kangxi3
(1. College of Electrical Engineering & Renewable, China Three Gorges Univ., Yichang 443002, China; 2. Hubei Key Laboratory of Cascaded Hydropower Stations Operation & Control, China Three Gorges Univ., Yichang 443002, China; 3. College of Science & Technology, China Three Gorges Univ., Yichang 443002, China)
Radial electromagnetic force is one of the main causes inducing the vibration and noise of the switched reluctance motor (SRM). In this paper, a novel 10/4 SRM is proposed, which can increase the magnetic flux density of air gap and the electromagnetic torque of SRM by increasing the number of stator poles. In addition, radial electromagnetic force is reduced by turning off the excitation current of stator winding in advance. The electromagnetic finite element model of SRM is established. The results show that, compared with the conventional SRM, the electromagnetic torque of the new type of SRM is increased by 51.7%; and the radial electromagnetic force is reduced by 45.3%. Furthermore, the influence of advancing the turn-on and turn-off angle on the SRM is analyzed. It is concluded that when the turn-off angle is 2 degrees, the radial electromagnetic force of SRM can be greatly reduced while assuring the electromagnetic torque output. Finally, the results show that the novel structure of 10/4 SRM is effective in reducing vibration and noise.
switched reluctance motor (SRM); electromagnetic force distribution; turn-off angle; vibration performance
10.13393/j.cnki.issn.1672-948X.2016.05.015
2016-05-12
国家自然科学基金项目(51507092)
邓长征(1980-),男,副教授,博士,研究生导师,主要研究方向为接地技术及其新材料研发、输变电工程先进设计理论及应用.
E-mail:dcz_1980@ctgu.edu.cn
TM301.4
A
1672-948X(2016)05-0075-05
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2021年5期)2021-11-04
防爆电机(2021年5期)2021-11-04
河北电力技术(2021年2期)2021-07-29
防爆电机(2021年4期)2021-07-28
电子制作(2018年1期)2018-04-04
电子制作(2016年11期)2016-11-07
电测与仪表(2016年23期)2016-04-12
中国学术期刊文摘(2016年2期)2016-02-13
电机与控制应用(2015年2期)2015-03-01