基于视觉机器人的大坝水下表面裂缝检测系统设计
2016-11-23 07:19陈从平李林波
三峡大学学报(自然科学版) 2016年5期
陈从平 聂 葳 吴 喆 李林波
(三峡大学 机械与动力学院, 湖北 宜昌 443002)
基于视觉机器人的大坝水下表面裂缝检测系统设计
陈从平 聂 葳 吴 喆 李林波
(三峡大学 机械与动力学院, 湖北 宜昌 443002)
针对大坝质量安全检测的问题,设计开发了一种基于视觉机器人的大坝水下表面裂缝检测系统,主要对其系统方案进行了设计,包括系统硬件平台、软件平台及信号传输方法,在此基础上,开发了裂缝自动检测算法,并通过实验进行了验证.结果表明,本文所提供的方法能有效地检测出不同类型的大坝水下表面裂缝,可为大坝水下表面裂缝巡检提供详细的技术指导,提高了大坝安全预警系数.
水下大坝; 裂缝检测; 系统设计; 视觉机器人
大坝在长期服役过程中,其混凝土面板水下部分不可避免地会出现不同程度的裂缝,尤其是服役初期,内部结构应力高速释放,裂缝产生速度更快,若不能被及时探测并进行维护,裂缝逐渐扩展极有可能会导致灾难性的后果[1-2].
目前,国内外的大坝水下表面裂缝检测技术主要有高密度电阻率法、面波勘探法、瞬变电磁法、声速测量法等[3-4],这些方法的共同缺点是探测深度浅(10~20 m),且定位误差大、效率低,对上百米深的大坝中、下部深水部位无法到达和探测.因而,实际操作中往往由于高面板坝深水部位裂纹难以探测的“隐蔽性”、以及现有深水裂纹检测手段能力的局限性,一般直至内部裂纹扩展到表面且出现了明显病症时才被发现,实时性差、灾情系数高.
基于视觉机器人的大坝水下表面裂缝检测技术,仅依靠安装在水下机器人上面的图像采集系统获取水下图像,然后传输到陆地上的主控平台进行图像分析和处理,从而快速定位可视表面裂缝,标注出该可能的裂缝位置,该方法能够提高裂缝检测的效率和准确率,从而大大地降低险情带来的危害.
1 总体方案设计
基于视觉机器人的大坝水下表面裂缝检测平台由硬件系统与软件系统两大部分组成,总体技术路线图如图1所示.在硬件系统和软件系统都安装与调试稳定以后,通过主控平台的控制,让装备有水下视觉成像装置(水下摄像机和光源)的水下机器人对大坝混凝土面板水下部分进行巡检或定点检测,采集水下视频,并传输到主控平台;然后通过图像处理软件系统对采集到的视频进行处理,从而判断是否有裂缝存在.拍摄时需保持相机轴线与被拍摄面垂直,且保持距离在一定的范围之内.那么通过主控平台不仅可以实时监控水下情况,而且可以自动记录大坝混凝土面板水下部分存在裂缝的位置,为后续的裂缝修补提供及时可靠的信息.
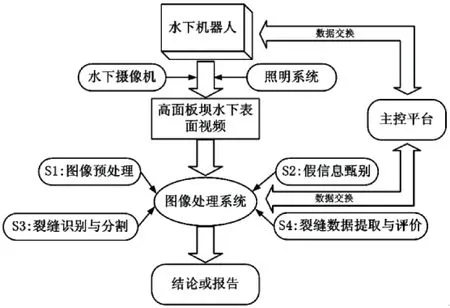
图1 总体技术路线图
1.1 硬件系统
基于视觉机器人的大坝水下表面裂缝检测平台的硬件系统主要包括:水下机器人(含承载基本结构、动力系统、视觉采集硬件)和主控平台(机器人运动、姿态、图像或视频采集等的控制,视频信息处理和机器人状态的监控).硬件系统的组成如图2所示.

图2 系统硬件模块图
1)硬件功能
水下机器人是视频采集系统的载体,它能够在主控平台的控制下在水中进行前进、后退、转向、上升、下潜、悬停和侧移等各种运动.水下机器人的核心硬件主要由如下几个部分组成:4个水平推进器,并且成“矢量”布局,从而增强了行驶过程中的稳定性.在运动过程中,位于本体内部的单片机接受由电缆传输来的控制指令,运动的能量用本体内的电池供给,4个水平推进器同时提供动力,采用空间矢量合成算法实现各种运动;快速升降控制由2个球形水柜、压缩气罐以及电磁阀系统构成,用以调整水下机器人的比重使其在水中呈悬浮状态,以及遇到紧急情况时能快速上浮;装载在水下机器人上面的视频采集系统包括水下摄像机、4束LED高亮度照明灯和图像采集卡.水下机器人在水下运行的过程中,主控平台可以控制照明灯的强度和摄像头转动和俯仰,并且能够调整相机的相关参数,从而达到最佳的拍摄效果.同时,为了对水下机器人状态进行实时的监控,机器人内部安装有压力、深度、温湿度和GPS等传感器.
主控平台主要由控制箱、显示器和遥控器组成.其中控制箱的作用是提供电源、信号控制处理、视频信息的处理、对水下机器人的状态进行监控;显示器能够实时监视水下摄像机的视频画面,监测水下机器人的动力系统、视频采集系统、深度、方向和位置等状态信息,同时,在软件界面上可以对整个系统的参数进行调节;遥控器能够对水下机器人进行前进、后退、上浮、下潜、姿态悬停、原地掉头、侧向平移、仰俯、翻转、比重调整等控制,同时能够对视频采集系统进行采集触发的控制.
2)硬件通讯
本系统的硬件之间的通讯采用局部有缆与远程无缆相结合的方法.水下机器人与水上主控平台之间通过漂浮于水面的光纤收发器-无线路由器来进行信号传输,其中水下机器人与光纤收发器之间通过光纤以太网相连接,光纤收发器将信号传输给无线路由器,再由路由器与控制站进行无线信息交互.在系统运行过程中,视频采集系统采集到水下图像后,通过电缆将视频信号直接传输到光纤收发器上,再由收发器将数据信号通过WIFI传给主控平台的控制箱,经过图像采集卡转换后,由软件系统进行处理,从而能够在主控平台的显示器上观看水下摄像机的视频画面和裂缝检测的结果.
1.2 软件系统
基于视觉机器人的大坝水下表面裂缝检测平台的软件系统安装在主控平台的控制机中,如图3所示,主要包括以下几个模块:水下机器人控制模块、地面站监测模块视频采集与处理模块、数据管理模块.

图3 软件系统
其中,水下机器人控制模块完成对水下机器人的远程运动控制;地面站监控模块完成对水下机器人状态和视频的监视功能;视频采集与处理模块完成对图像的捕捉、传输、播放与录制等任务;数据通信与管理模块完成数据传输、转换、保存和处理的功能.各类控制和通讯软件在算法上均有较为成熟的实例作为借鉴,而图像处理模块则需要针对检测对象的特征进行专门开发.尽管机器视觉以及水下成像技术目前已得到长足发展,但在水下目标识别方面并没有通用的图像处理算法,主要因为水下视觉能见度差、视频质量受水体波动、水下悬浮物、水的折射、虚假物的干扰等因素的影响,技术方法上远比在空气中复杂.
针对大坝混凝土面板水下表面裂缝的视频特征,制定图像处理软件系统方案如图4所示,其主要处理算法功能需求为:1)图像预处理.需将图像灰度化后,通过水下图像增强预处理技术去除图像噪声和照明不均的问题,消除由水波动、折射、吸光、悬浮物(粒)散射、浑浊等造成的图像质量严重退化现象;2)水下图像分割,对预处理后的图像进行分割,将作为假信息的纹理、阴影、外轮廓的模块进行分割、去除;3)水下环境干扰物的判别,根据裂缝的特征建立特征建模,区分水下环境中的干扰物(纹理、虚假物阴影、轮廓棱角等假信息),判断是否存在裂缝;4)裂缝检测,检测出裂缝在图像中的具体位置,保证检测到的裂缝的完整性与准确性,描述裂缝边缘的形态,从而获得裂缝的相关信息.
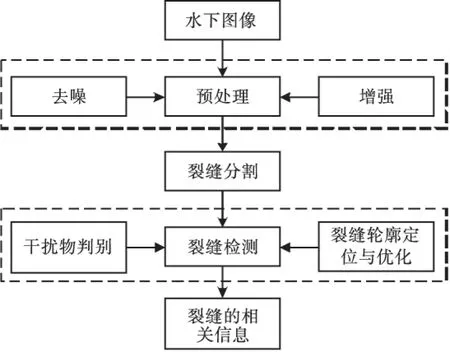
图4 图像处理系统处理流程图
2 实验及应用
技术实施的难点在于如何从大坝深水表面视觉信号中自动提取裂缝信息,而作为水下机器人本身及水下-陆基信号传输技术目前已经较为成熟,可直接引用.但视觉信号处理与识别技术因环境差异及目标本身特征不同而不能通用,需要针对性地进行开发,包括水下低照度图像去噪和增强、裂缝分割和裂缝识别.作者在前期相关工作中已对相关技术难点进行研究,开发了相应的算法,并对模拟的深水混凝土试验水槽中采集裂缝样本进行了验证,结果如图5~6所示,其中图5为单一裂缝检测结果,图6为复杂裂缝检测结果.检测过程中所经历的步骤和开发的相应算法为:
Step1:水下模糊图像增强.针对该环节开发了照明均匀化处理技术和同态滤波(MBHF)算法[5],提出了一种新的水下图像增强预处理技术去除图像噪声和照明不均的问题.该算法基于照明反射模型首先将图像分块进行局部背景估计,利用去图像背景的方法使照明均匀化,然后利用改进的Butterworth-MBHF滤波器在保留图像原貌和细节时对感兴趣的目标进行有效增强.该算法很好地解决了水下图像预处理和甄别的难题,处理效果如图5(b)和图6(b)所示.
Step2:裂缝分割.针对该环节开发了基于过渡区提取(LDC)图像分割提取算法对可能的裂缝进行分割[6],首先求取原图像的清晰度图像的局部复杂度曲线,据此复杂度曲线获得过渡区提取门限,根据提取出的过渡区的灰度直方图求取图像分割阈值并对图像进行分割.该算法很好地解决了裂缝分割问题,处理效果如图5(c)和图6(c)所示.
Step3:裂缝提取.针对该环节,开发了基于裂缝两侧轮廓特征匹配和模板匹配相结合的算法[7],根据分割后裂缝边缘与其它干扰的区别,首先提取面积、曲率、最大弦长、最大投影长度4个特征参数,建立BP神经网络模型,判别干扰物.然后,根据裂缝轮廓相互匹配的特征,通过模板搜索的方式检测出准确、完整的裂缝轮廓.该算法很好地解决了水下环境干扰物的识别与判断问题,最终的检测效果如图5(d)和图6(d)所示.
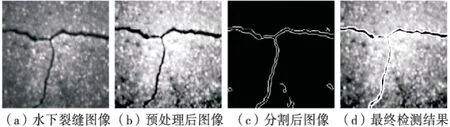
图6 复杂水下大坝表面裂缝检测结果
3 结 论
通过水下视觉机器人可以快速判定混凝土坝水下表面裂缝的存在性、平面尺寸、位置信息,为进一步进行裂缝深度检测提供目标和依据,极大地提高检测效率,提高大坝安全服役的可靠性.
[1] 洪 云.大坝安全检测的原理与应用[D].南京:河海大学,2004.
[2] 王理华.我国水电站大坝安全现状分析[J].水力发电,1994(6):35-39.
[3] 吴中如.大坝与坝基安全监控理论和方法及其应用[J].江苏科技信息,2005(12):1-6.
[4] 谷云静.水库大坝安全自动化监测问题研究[D].兰州:兰州理工大学,2011.
[5] 陈从平,王 健,邹 雷.一种有效的低对比度水下图像增强算法[J].激光与红外,2012,42(5):567-571.
[6] 陈从平,秦 武,方子帆.基于LDC的图像过渡区提取与分割[J].激光与红外,2011,41(9):1023-1026.
[7] Chen Congping, Wang Jian, Zou Lei. A Novel Crack Detection Algorithm of Underwater Dam Image[J]. International Conference on Systems and Informatics (ICSAI), 2012:1825-1828.
[责任编辑 王康平]
Design of Underwater Dam Surface Crack Detection System Based on Visual Robot
Chen Congping Nie Wei Wu Zhe Li Linbo
(College of Mechanical & Power Engineering, China Three Gorges Univ., Yichang 443002, China)
Aiming at the problem of dam quality safety detection,an underwater dam surface crack detection system based on visual robot is designed and developed; mainly focused on its scheme design, including its hardware, software, and signal transmission method. And then the algorithm for cracks automatic detection is developed and verified experimentally. The results show that the different types of underwater dam surface cracks all can be detected with the method presented in this paper. Therefore, it can give some technical guidance for the underwater dam surface cracks inspection and improve the dam safety factor.
underwater dam; crack detection; system design; visual robot
10.13393/j.cnki.issn.1672-948X.2016.05.014
2016-05-20
中国水利水电科学研究院开放基金项目(IWHRKF201010)
陈从平(1976-),男,教授,博士,研究方向为机器视觉,自动过程控制.E-mail:mechencp@163.com
TV543.+6
A
1672-948X(2016)05-0072-03
猜你喜欢
石油与天然气地质(2021年3期)2021-06-29
少儿美术(快乐历史地理)(2020年5期)2020-09-11
意林·全彩Color(2018年7期)2018-08-13
百科知识(2018年6期)2018-04-03
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国三峡(2013年11期)2013-11-21