
安全车距预警装置设计
2016-11-22 08:05黄德永于士军
时代农机 2016年10期
黄德永,于士军
(德州学院 汽车工程学院,山东 德州 253000)
安全车距预警装置设计
黄德永,于士军
(德州学院 汽车工程学院,山东 德州 253000)
文章利用车速传感器和激光测距传感器发射、接收装置时刻计算本车和前方车辆的距离,当车距小于安全车距时,汽车发出警报并缓慢减速,当大于安全车距时,警报解除恢复车速。安全距离可以在国家规定的安全距离外自行设定,用于在不同天气的情况下设定不同的安全车距。
安全车距预警;车速传感器;激光测距传感器;报警
1 车速传感器的介绍
车速传感器在现代汽车上的应用非常广泛,自动驾驶,自动锁车门,电子仪表等装置都需要车速传感器来提供信号。电磁感应式车速传感器由永久磁铁,铁芯及线圈组成(如图1所示)。它通过转子旋转时改变了永久磁铁产生的磁通量,因此在线圈中产生了周期变化的感应电压,电子控制单元根据脉冲的大小来计算汽车的车速。
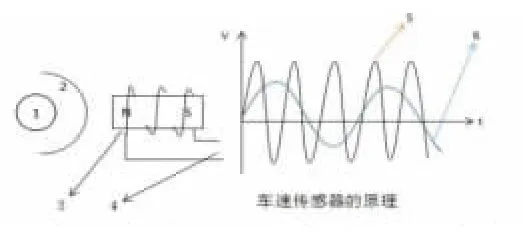
图1 电磁感应式车速传感器组成
2 激光测距传感器的介绍
激光测距传感器是利用发射器发射激光脉冲后经障碍物反射被接收器接收所经过的时间来计算距离(如图2所示)。由于激光光速的发射角小,因此测量距离远,它具有测量精度高、易操作、测量时间短、使用寿命长等优点,它被广泛应用于起重机防碰安全系统,汽车防碰撞安全控制,干滩监控系统,监控信号触发控制等领域,对于人民的生活有着积极的作用。
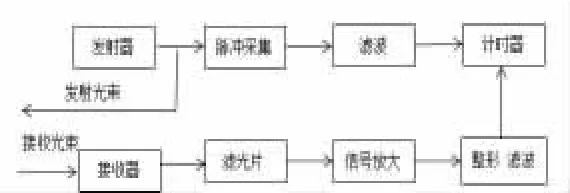
图2 激光测距传感器原理
3 安全车距预警的原理
安全车距预警装置(如图3所示)采用激光测距传感器,车速传感器,报警装置和安全车距设置器。当激光发射器发出激光脉冲后计数器开始计时,遇到障碍物后向各个方向散射,部分反射回来被接收器接收且计数器停止计时,计算出两车的距离后,在下一时刻再次计算两车距离。如果两车距离越来越远说明前车速度比后车速度快即不存在安全车距问题,如果两车距离越来越近,则可以计算出两车的相对速度并把数据传给电子控制单元用于提前分析两车的相遇时间,可以做到提前预警。当车距在安全车距内,电子控制单元发出信号减少空气进入使车速降低并报警提醒司机减速。
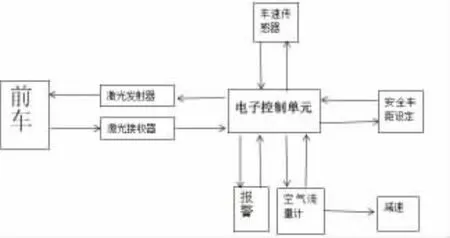
图3 安全车距预警原理
4 安全车距预警的计算
已知第一次传感器从发射到接受所用时间为t,激光
在空气中的传播速度为c,这时两车车距为L:

由于光速远大于汽车车速,所以汽车的行驶速度忽略不计。若车距L大于司机设定的安全车距,则电子控制单元不报警。若车距L小于安全车距,则汽车在下一时刻发射激光并接收激光所用时间为t1,这时两车车距为L1:

根据(1)(2)两式求得两次激光所用时间差为t2,两次激光测距所测得的车距距离差为L2,则两车的相对速度为Vr:

通过车速传感器的信号,电控组件根据感应电压的频率计算出本车的车速为Va,根据(3)式求得前车的车速为Vb:

因为汽车在行驶过程中具有许多不确定的因素,所以两车的距离每时每刻都在进行更新,这些数据传给电子控制单元,电子控制单元根据两车的距离来进行调整,达到安全行车的目的。
5 电子控制单元的程序化设计
首先,司机根据不同天气,驾驶技术的熟练程度自主设定安全距离。当计算出的车距大于安全车距程序返回再次计算下一时刻的车距,若计算出的车距小于安全车距,程序继续计算前车的车速和减速,主程序返回计算下一时刻车速。程序流程如图4所示。

图4 程序流程图
6 警报和安全车距设置
由电子控制单元连接的报警装置处于驾驶室,司机可以通过汽车下方屏幕随时看到和前车的距离,在屏幕下方司机可以自主设定安全车距,但是《中华人民共和国道路交通安全法》规定:机动车在高速路上行驶,车速超过每小时100km时,安全距离在100m以上;车速小于100km时,安全距离不得少于50m,因此应该遵守国家规定的安全距离。当车距小于安全距离时,语音报警器发出“请注意车距”的报警声并且电子控制单元开始发送减速信号。
7 结语
经过激光传感器的测距,在行车过程中通过报警装置能更好的安全规避障碍物,达到安全行驶的目的。该装置经过实验结果表明,能够在司机设定的安全车距内发出报警并减速,具有很好的实用效果。通过这个设计,可以有效减少车祸的发生和财产的损失,这种采取安全规避障碍物的装置,在国家规定范围内具有很好的实用,可行,安全的特点,具有很好的发展前景。
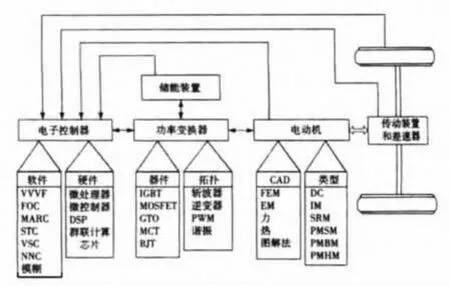
图1 电动汽车驱动系统
(2)储能装置的选择。电动汽车使用的储能器件有燃料电池、蓄电池和超级电容等,也有的电动汽车将几种储能器件组合使用。目前越来越多的制造商使用超级电容,其特点是内阻小、电容量大,充放电性能优良。
(3)变换器选择。变换器能够将电压控制在合理的范围内,提高电机的性能,变换器还能够将电动汽车的机械能转化为电能储存在蓄电池中,新能源汽车使用的主要是DC/DC变换器,这种变换器的优点是结构简单、成本低廉等。
(4)功率变换器。功率变换器是将交流电压转换为电动汽车需要的稳定直流电压,电动汽车中的功率变化器能够将发电机发出的交流电转换为直流电,供给用电器使用或者储存在储能设备中。
4 结语
综上,文章分析了电动汽车制动能量回收的主要原理和主要过程,介绍了制动能量回收系统的应用现状以及制动能量回收系统的设计方法。
[1]张运花.电动汽车制动能量回收系统的设计[J].汽车实用技术,2013,(4):112.
[2]孙泽昌.电动汽车制动能量回收系统研究[J].农业机械学报,2012,(2):53.
[3]付海涛.电动汽车制动能量回收系统的分析研究[J].时代农机,2016,(4):80.
Design of Safe Vehicle Distance Warning Device
HUANG De-yong,YU Shi-jun
(Automotive Engineering Institute,Dezhou College,Dezhou,Shandong 253000,China)
The article calculates the distance between the car and the car before it by using the speed sensor and laser ranging sensor moment calculation default of transmitting and receiving device.When the distance is less than the safe distance,the car alarm and slows down;when the distance is greater than the safe distance,the alarm stops and the speed recovers.Safe distance can be stipulated by the state security distance,and set in different weather conditions.
safety car distance warning;speed sensor;laser ranging sensor;warning
U463.6
A
2095-980X(2016)10-0062-02
2016-09-14
黄德永,主要研究方向:交通运输。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
测控技术(2018年6期)2018-11-25
装备制造技术(2018年8期)2018-10-17
莫愁·时代人物(2018年7期)2018-09-12
通信电源技术(2018年5期)2018-08-23
莫愁(2018年20期)2018-07-19
汽车维护与修理(2018年1期)2018-04-04
制导与引信(2017年3期)2017-11-02
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车维护与修理(2015年5期)2015-02-28
