
地铁隧道形变检测定位系统实现
2016-11-21 09:47王星
电子设计工程 2016年21期
王星
(北京交通大学 机械与电子控制工程学院,北京 100044)
地铁隧道形变检测定位系统实现
王星
(北京交通大学 机械与电子控制工程学院,北京 100044)
检测地铁隧道是否发生形变关系到列车行车安全。近年来,基于激光扫描测量原理的车载式隧道形变检测系统有了长足发展,但仍然存在相对定位精度不高的问题,导致最终的形变检测精度受限。本文设计了基于多传感器融合的地铁隧道形变检测定位系统,能够将同一线路同一位置多次检测的数据匹配,快速定位隧道位置,利于建立隧道模型。实验结果表明,该系统能够有效进行相对定位,精度可达±10cm,具有一定的工程应用价值。
多传感器融合;相对定位;地铁隧道;形变检测
地铁隧道在长期运营过程中,由于车辆通行、地面建筑施工以及土层压力等综合因素,可能导致隧道产生局部形变,威胁到列车行车安全[1-2]。随着城市轨道交通的发展,基于激光扫描测量原理的车载式隧道形变检测系统取得了长足的发展[3-4]。
基于激光扫描测量原理的车载式隧道扫描系统的代表有德国Spacetec公司生产的TS3型系统和意大利Mermec公司研制T?SIGHT 100型系统。TS3型系统扫描频率可达到300 Hz,扫描范围为360°,检测车度可达100 km/h[5];T·SIGHT 100型系统扫描频率为100 Hz,精度可达3 mm[6]。国内对隧道形变检测研究起步较晚,车载式检测系统尚无相对成熟产品[7]。
基于激光扫描测量原理的车载式隧道形变检测系统在高速测量的情况下需要多次测量,以采集足够隧道信息[8-9],由于转速传感器获得的公里标累计误差较大,导致定位精度不高[10-11],无法使得多次检测的数据匹配,导致建立隧道模型存在难度,精度受限。文中设计了一种多传感器融合的地铁隧道形变检测定位系统,克服了同一线路同一位置多次测量后数据不匹配的问题,实现快速定位隧道位置的功能,为后续形变分析提供保障。
1 多传感器融合定位原理
车载系统的里程标记是由固定在轮毂上的转速传感器实现,累计误差较大[12-13],导致同一位置多次检测数据无法匹配,因此利用车载系统已有传感器,在不增加成本的前提下,采用多传感器信息融合技术,通过激光扫描测距仪、转速传感器及激光位移传感器进行组合,利用各传感器之间的优劣互补,提高整个系统的容错性和可靠性[14-15],实现基于隧道及轨道特征的高可靠性、高精度的相对定位,解决同一线路同一位置多次检测数据不匹配的问题。
各传感器定位信息如表1所示。列车对同一线路多次检测获取线路状态数据。首先通过转速传感器对列车进行里程定位,获得线路公里标,选择公里标误差最小的一次检测数据作为基准数据,其余数据作为被校准数据。然后通过激光扫描测距仪对列车进行粗校准定位,利用激光扫描仪获取隧道特征,识别站台区间、洞体区间及区间分界点。将被校准的区间分界点对应的公里标与基准公里标进行对比校准,从而实现每一个隧道区间内列车的粗校准里程定位。最后通过激光位移传感器对各隧道区间进行细校准定位,利用激光位移传感器获取轨道特征,识别钢轨扣件。将被校准隧道区间内每一个扣件公里标与扣件基准公里标进行对比校准,从而实现隧道区间内列车的细校准里程定位。
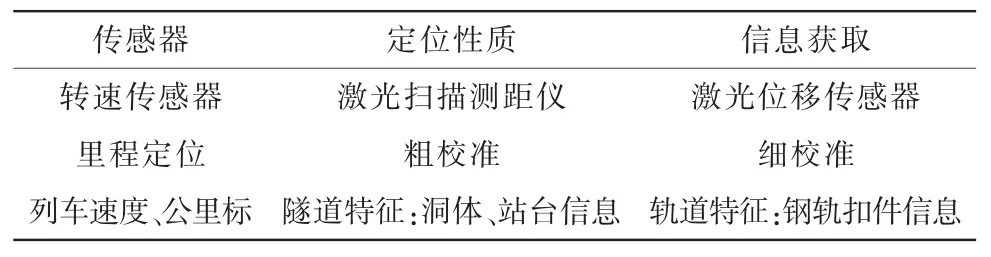
表1 传感器定位信息
2 系统硬件设计
地铁隧道车载形变检测定位系统方案如图1所示。采用激光扫描测距仪实时连续采集隧道轮廓信息;以位移计为列车姿态修正工具,补偿列车在不平稳状态下激光扫描测距仪所测数据产生的误差;转速传感器对列车测速定位,获得公里标,实现检测断面与里程的匹配;同时需要同步信号系统实现同一里程的所有采样数据在同一时钟存储,以保证断面测量的精度。采用FPGA作为中央处理器,对以上传感器信号进行采集处理,实现数据的采集、缓存,同步信号的添加等,并通过USB接口芯片上传给PC机。同时,激光位移传感器高速采集轨道特征通过PCI上传给PC机。
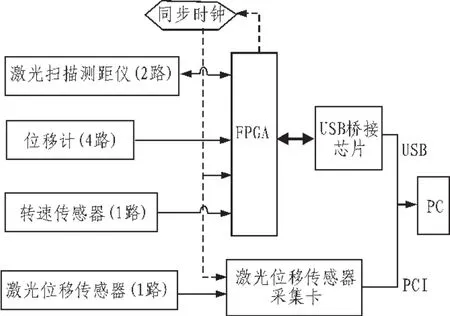
图1 车载形变检测定位系统框图
3 系统软件设计
系统软件实现分为粗校准定位和细校准定位两部分,设计结构如图2所示。
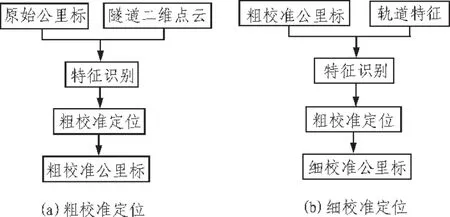
图2 系统软件设计结构图
3.1确定基准数据
转速传感器获取线路公里标,第n个脉冲对应的公里标:

式中,d为车轮直径,m为转速传感器每周输出的脉冲数,S0为起始公里标。由于每次检测产生的误差大小不一致,需要将各次检测得到的公里标数据与地铁公司提供的原始数据对比,以公里标误差最小的检测数据作为基准数据。
3.2粗校准定位
粗校准定位是将隧道以区间划分,由激光扫描测距仪获取的隧道二维点云数据进行特征识别,识别洞体区间、站台区间及隧道区间分界断面。首先将被校准数据与基准数据对应隧道区间分界断面的公里标进行精确校准匹配,然后假设隧道区间误差是在区间内均匀产生,因此可将区间内断面数据对应的公里标以数据压缩形式进行校准匹配。该校准方法可用下式表示:

式中,Si表示被校准数据粗校准后第i个断面数据对应的公里标,Si(D-1)表示基准数据当前隧道区间D与上一隧道区间分界断面的公里标,SiD表示基准数据当前隧道区间D与下一隧道区间分界断面的公里标,同理,S′i、S′i(D-1)、S′iD表示被校准数据相应的公里标,不再赘述。粗校准完成后,可将定位误差减小到30cm以内。
3.3细校准定位
由于激光位移传感器的采样频率远高于激光扫描测距仪频率,因此粗校准定位完成后,各隧道区间可利用激光位移传感器进行细校准定位。激光位移传感器识别出隧道区间内每个扣件,将该隧道区间划分为更小的扣件区间。轨道扣件间隔60 cm循环出现,粗校准定位后误差已减小到30 cm以内,因此可确定基准隧道区间与被校准隧道区间扣件的一一对应关系,该校准方法可用下式表示:

式中,Sr表示被校准数据细校准后第r个激光点数据对应的公里标,Sr(E-1)表示基准数据当前扣件区间E与上一扣件区间分界点的公里标,SrE表示基准数据当前扣件区间E与下一扣件区间分界点的公里标,同理,S′r、S′r(E-1)、S′rE表示被校准数据细校准相应公里标,不再赘述。
激光位移传感器对应的公里标细校准定位完成后,根据扣件区间分界点公里标确定其对应的隧道断面公里标,按式(3)方式对隧道断面公里标数据进行细校准定位,获得最终隧道断面数据对应的公里标。细校准完成后,可将定位误差减小到10cm以内。
4 系统验证与分析
为验证该地铁隧道形变检测定位系统的可行性,在地铁环境进行了实验。将车载系统安装于检测车,沿同一线路重复检测了7次,其中1次误差最小的数据作为基准,校准其余6次数据。
基准数据与校准数据同一隧道区间分界断面临近位置粗校准前后隧道轮廓对比如图3所示,由图3(a)可知,原始校准数据与基准数据均有不同程度的偏移,分界断面全部错位,由图3(b)可知,粗校准后校准数据与基准数据基本重合,分界断面完全重合。为验证粗校准定位精度,从6次被校准的数据中提取了24个特征断面进行精度验证,误差结果如表2所示,平均误差为10.7 cm,误差均小于30 cm,满足粗校准定位精度要求。
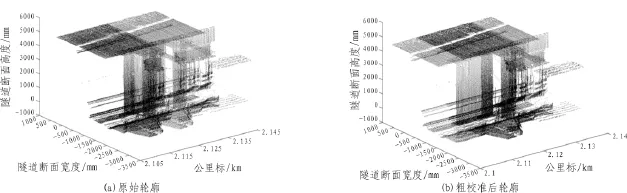
图3 粗校准前后隧道轮廓图
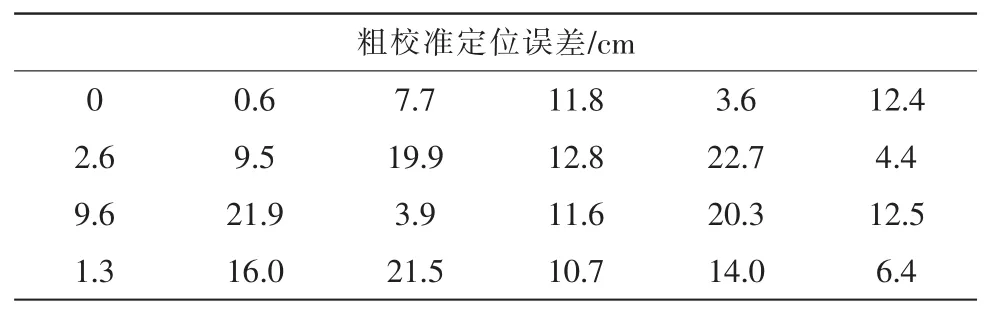
表2 粗校准定位误差
基准数据与校准数据同一隧道区间分界断面对应轨道位置细校准前后轨道特征对比如图4所示,由图4(a)可知,原始校准数据与基准数据存在较大偏差,各扣件完全错位;由图4(b)可知,经过粗校准定位,各扣件错位程度减小到30cm以内;由图4(c)可知,经过细校准定位,各扣件尖端已完全重合,并且错位程度进一步减小,均小于10 cm,满足最终定位要求。细校准后的24个隧道特征断面公里标误差结果如表3所示,平均误差为4.1cm,均小于10 cm,满足多传感器定位算法精度要求。

图4 细校准前后扣件特征对比图
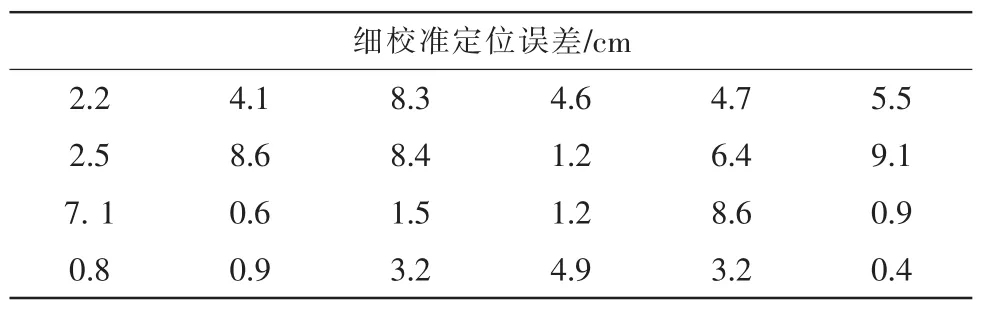
表3 细校准定位误差
5 结 论
文中基于多传感器融合技术,设计了地铁隧道形变检测定位系统,完成了系统硬件设计、软件设计,并在地铁环境进行验证。实验结果表明,该系统能够将同一线路同一位置多次检测的隧道轮廓数据匹配,实现快速定位,定位精度为±10 cm,为隧道模型可靠性提供保障。下一步将研究隧道模型建立方法,进行隧道形变分析。
[1]赵兵帅,黄腾,欧乐等.基于椭圆拟合的隧道断面监测及其应用[J].水利与建筑工程学报,2013,11(1):130-133.
[2]谷川,秦世伟.圆形隧道断面检测数据拟合新方法[J].大地测量与地球动力学,2010,30(5):97-101.
[3]夏国芳,王晏民.三维激光扫描技术在隧道横纵断面测量中的应用研究[J].北京建筑工程学院学,2010,3:21-24.
[4]李长明.隧道断面测量仪中的激光测距[J].探矿工程,1999,(6):15-16.
[5]Chungsik Yoo,Hyun-Kang Shin.Deformation behaviour of tunnel face reinforced with longitudinal pipes—laboratory and numerical investigation[J].Tunnelling and Underground SpaceTechnologyIncorporatingTrenchlessTechnology Research,2002,184.
[6]Ruey-Tsung Lee,Fang-Jung Shiou.Multi-beam laser probe for measuring position and orientation of freeform surface[J]. Measurement,2011(44):1-10.
[7]周奇才,金奇,高嵩,何自强.基于激光测距技术的隧道断面形变检测系统[J].测控技术,2010(5):44-46,49.
[8]郭一诗.融合摄影测量与激光扫描技术的隧道全断面高速动态检测技术研究[D].北京交通大学,2011.
[9]朱宁宁.三维激光扫描在地铁隧道形变监测中的应用[J].测绘工程,2015(5):63-68.
[10]隋国栋,李海锋,许玉德.轨道几何状态检测数据里程校正算法研究[J].交通信息与安全,2009(6):18-21.
[11]李志鹏,许明伟,郭文峰等.基于激光断面的隧道安全监测系统的研究[J].机电一体化,2008,13(1):70-73.
[12]陈艳华.传感器在高速铁路中的应用研究[J].电子设计工程,2009,17(10):34-35.
[13]刘玉.车载式线路全断面检测系统研究[D].北京交通大学,2010.
[14]邓超.多传感器定位在高速铁路的应用[J].铁道通信信号,2006,42(12):28-30.
[15]郭自刚,赵建波,倪明等.基于嵌入式多信息融合的列车测速定位系统[J].计算机工程,2013(12):11-16,21.
Realization of deformation detection positioning system in metro tunnel
WANG Xing
(School of Mechanical,Electronic and Control Engineering,Beijing Jiao-tong University,Beijing 100044,China)
Deformation detection of the metro tunnel is related to the subway driving safety.In recent years,the vehiclemounted tunnel deformation detection system based on laser scanning measurement principle has developed a lot,but the relative positioning accuracy is still not high,which leads to the limitation on the ultimate deformation detection accuracy.In this paper,the deformation detection and positioning system based on multi-sensor data fusion is designed,which can match the multiple metrical data of the same line at the same position and position the tunnel quickly to help building the tunnel model.Experimental results indicate that the system can effectively carry out the relative positioning,with the accuracy of± 10cm.Therefore,this system has a certain engineering application value.
multi-sensor data fusion;relative positioning;metro tunnel;deformation detection
TN98
A
1674-6236(2016)21-0147-03
2015-11-16稿件编号:201511153
王 星(1990—),女,四川成都人,硕士研究生。研究方向:轨道交通安全检测。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
韩国语教学与研究(2022年3期)2022-02-08
铁道建筑技术(2020年11期)2020-05-22
中国外汇(2019年13期)2019-10-10
云南师范大学学报(自然科学版)(2019年2期)2019-04-04
西南交通大学学报(2018年5期)2018-11-08
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
现代制造技术与装备(2016年7期)2016-03-02
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
凿岩机械气动工具(2014年3期)2014-03-01
