
表面肌电采集与在线识别系统
2016-11-17 10:13何可人罗锦宏
计算机测量与控制 2016年3期
何可人,孙 伟,罗锦宏,邹 凌
(1.常州大学 信息科学与工程学院,江苏 常州 213164; 2.常州市生物医学信息技术重点实验室, 江苏 常州 213164; 3.常州信息职业技术学院, 江苏 常州 213164)
表面肌电采集与在线识别系统
何可人1,2,孙 伟1,2,罗锦宏3,邹 凌1,2
(1.常州大学 信息科学与工程学院,江苏 常州 213164; 2.常州市生物医学信息技术重点实验室, 江苏 常州 213164; 3.常州信息职业技术学院, 江苏 常州 213164)
设计了一套简易且分辨率高的表面肌电采集与在线识别系统;系统硬件部分包括信号两级放大、带通滤波、精密整流、16位AD转换芯片ADS1120、AVR单片机等部分;软件部分基于JAVA编程,具有实时滤波、显示并存储肌电信号、在线识别手部动作等功能;系统放大增益倍数为100~2 500可调,根据不同被试同一动作的肌电信息,微调放大倍数以减少个体差异;当放大倍数为1 000倍时,识别精度达0.3 μV;此外还设计了训练范式,根据被试的训练数据提取在线识别算法的参数,以提高识别准确率;实验结果表明:该系统具有较好的稳定性,能够准确识别四类手部动作,平均识别率达84.37%。
表面肌电;采集;在线识别
0 引言
表面肌电(surface electromyography,sEMG) 是人体运动时肌肉收缩产生的生物电反应在皮肤表面处时间和空间上的综合,是一种简单、无创、容易被受试者接受的肌电活动[1]。sEMG信号不仅可在静止状态测定肌肉活动,而且可在各种运动过程中持续观察肌肉活动的变化;不仅是一种对运动功能有意义的诊断评价方法,而且也是一种较好的生物反馈治疗技术。国内外的大量实验数据和文献表明健康人人体皮肤表面的肌电信号振幅约为100~5 000 μV,均方根在0~1.5 mV,频率为20~500 Hz[2],肌电信号信噪比低,易受背景噪声干扰。虽然专用的陷波电路可以滤除大部分工频干扰,但陷波后数据传输过程中依然会受到新的背景噪声的影响。针对表面肌电动作的识别,国内外大多采用BP神经网络、朴素贝叶斯、支持向量机分类器等离线算法[3],离线算法固然识别率高,但占用资源太大不能做到实时控制受控对象。
本文设计出一套高分辨率的表面肌电采集与手部动作在线识别系统。本系统也可以输出识别信号实时控制各种实物,提高了肌电的实用性,也为康复工程、运动医学和人机交互等研究提供了一种可靠的运动信息捕获系统。
1 系统整体设计与方案概述
为保障系统使用方便性与被试的安全性,本文采用了一次性Ag/AgCl贴片式表面电极。由于电极采集的信号非常微弱、本身存在噪声,并且由于肌电信号非线性和随机性的特点,首先需要对获取的肌电信号进行适当的放大、滤波处理。为减小在线识别算法的时间复杂度,硬件部分加入整流模块。16位模拟前端ADS1120可以得到高分辨率的数字信号,然后将数字信号通过SPI接口传至以ATmega128为核心的主控模块。主控模块控制采集进程,并将采集到的数字肌电信号通过串口转USB模块传送至上位机采集程序。通过JAVA编写的上位机程序,滤除工频干扰、显示并存储肌电信号、实现手部动作在线识别、识别信号在界面上实时显示。实验中通过硬件微调放大倍数与软件开发训练范式两方面结合,以减少个体差异,保障识别精度;利用反馈小车进行有任务的训练,检测系统稳定性。本系统的整体框架如图1所示。
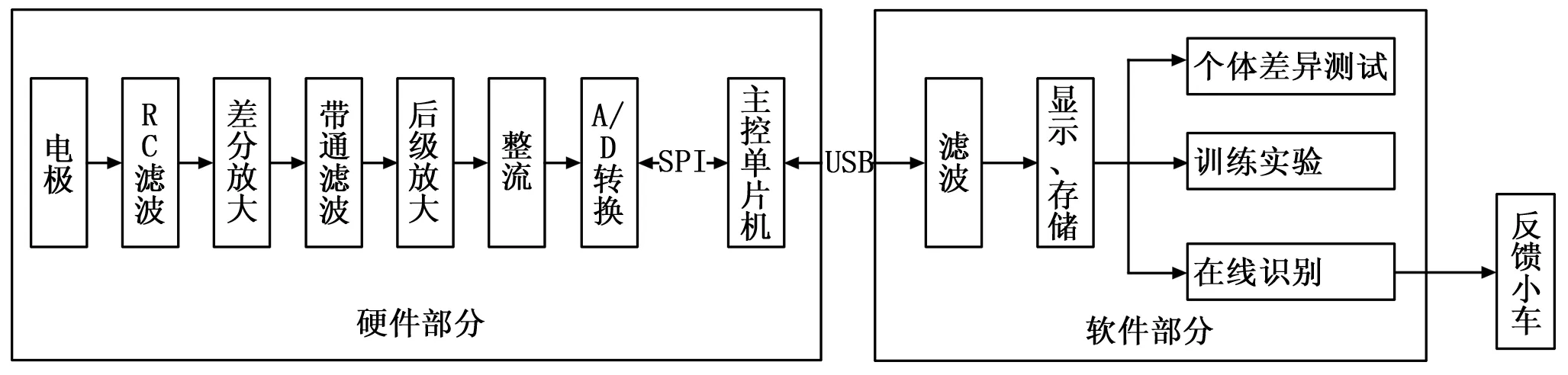
图1 采集、识别系统整体框图
2 硬件部分
2.1 放大电路
表面肌电信号电极输入时会受到环境中的各种干扰源的影响。如何有效地抑制甚至去除其中的干扰,对表面肌电信号后续处理及应用至关重要。除工频外的其它干扰信号对每颗电极的影响基本相似,因而采用差分输入的方式,使干扰信号在差分电极上近似形成共模信号,再利用高共模抑制比的差分放大器来抑制这部分信号[4]。本设计中选用了低功耗、高精度、低噪声仪表放大器INA128。输入失调最大为50 μV。输入失调漂移为0.5 μV/℃,共模抑制比为120 dB(G=100)。其增益计算公式为
(1)
式中,RG为管脚1和管脚8之间的电阻,G为增益值。
由于表面肌电信号是微弱信号,为了避免其它信号的干扰,增益值要足够大,但增益值如果太大可能在第一级就出现饱和,因此RG的值不能太小,增益也就不会太高。另一方面,对于单级放大器来说,增益和输出信号的电压变化范围是互相约束的,为了能获得高增益,又能获得较大的输出摆幅,因此使用两级放大器[5]。两级放大总的放大倍数为两级放大倍数的乘积,但后级放大器同时放大了前级的误差,为保障信号质量,前级放大远大于后级放大。本设计中后级放大电路采用集成运放OPA134,其增益计算公式为:
(2)
前级放大器中RG是100~500欧姆阻值可调电阻,放大倍数为100~500倍;后级放大器中R4为10 K欧姆的电阻,RG2为10~50 K欧姆阻值可调电阻,放大倍数为1~5倍。总放大倍数100~2 500倍之间,电路原理如图2所示。
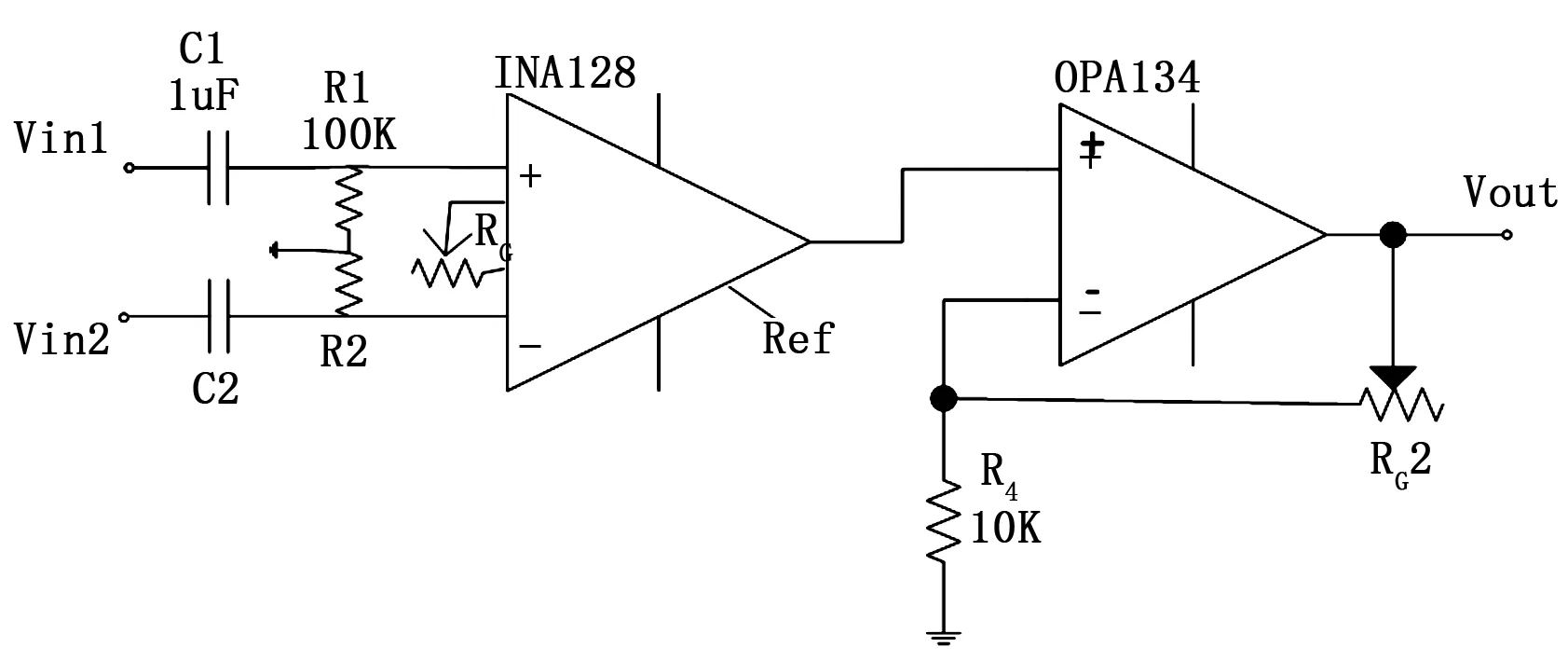
图2 差分放大、后级放大电路
2.2 滤波电路

50 Hz的工频对肌电采集中干扰最严重,降低这些干扰多采用双T陷波电路。但这类电路对称性要求高,元器件精度要求严格,否则直接影响陷波频率和品质因素(Q值),因此对制作工艺或筛选器件带来困难,而且调节起来相当困难。因此,本设计使用软件滤波以降低硬件成本和复杂度。
Butterworth滤波器的特点是通频带的频率响应曲线最平滑。本设计中带通滤波其采用二阶高通滤波器和二阶低通滤波器组成的四阶带通滤波器,原理如图3所示。

图3 带通滤波电路
2.3 整流电路
表面肌电信号具有交变性,交变性指表面肌电信号是一种无序的交流电压信号,它与肌肉冲动时产生的肌张力大致成比例,在不同肌肉运动下所取得的表面肌电信号幅值不同。本设计在信号完成放大、滤波之后,添加了精密整流电路[7]如图4所示。图中D1、D2为IN4148,这是一种小型的高速开关二极管,开关比较迅速,广泛用于信号频率较高的电路进行单向导通隔离、通讯、电脑板、电视机电路及工业控制电路。精密整流电路利用二极管的开关特性以及运算放大器OPA134搭建的电压跟随电路,当输入信号为正时进行同相电压跟随,当输入信号为负时进行电压反向跟随,从而把输入信号都转换为正信号。在线识别程序采用表面肌电的功率信息,若输入信号为负,则对于每一次采集的数据都需要做求信号幅值的平方。而电压信号都为正时可以大大降低了在线识别算法的时间复杂度,提高识别效率。

图4 精密整流电路
2.4 主控模块设计
本系统选用ATmega128单片机作为主控制器,它采用哈佛结构,通过在一个时钟周期内执行一条指令,使其可以取得1MIPS/MHz的性能,一定程度上缓解系统在功耗和处理速度之间的矛盾[8]。
为保障采集的肌电信号的精度,选用16位高精度AD转换芯片ADS1120,单片机通过SPI接口与AD芯片进行数据交互。使用2.5 V的外部参考以保障电压的稳定性,提高信号质量。本系统中采集20~500 Hz信号,经过整流后频域最大值为1 000 Hz,所以根据奈奎斯特采样定理,采样频率为2 KHz。实验中一般放大倍数为500倍左右,配合16位的AD芯片,系统可识别精度为0.3 μV左右。
3 软件部分
3.1 在线滤波
考虑到JAVA跨平台的特点,本设计上位机软件部分使用JAVA开发完成,以方便移动设备端的移植。上位机程序与肌电采集设备利用串口进行通讯。comm.jar开发包提供了对USB串口通讯的支持。软件部分主要实现对肌电信号实时信号滤波、显示与存储数据、在线识别。
50 Hz工频干扰是最大的干扰之一,但经过整流后干扰频率为100 Hz。采集软件采用一个100 Hz数字陷波器来去除工频干扰。使用双二阶滤波器,它是一种二阶递归线性滤波器,包含两个极点和两个零点,可以由如下公式实现:
(3)
式(2)中,x[n]、x[n-1]和x[n-2]是陷波器的输入。系数b0、b1和b2用来确定零点,a1、a2用来确定极点的位置。这些系数的值可以由以下公式确定:
(4)
(5)
(6)
(7)
fN是工频,fsample是采样频率2 kHz。BW是工频陷波器的带宽,本设计中是10 Hz。
3.2 个体差异
为保障识别精度,减少个体差异,系统结合微调硬件放大倍数与软件开发训练范式两方面。
当被试初次接受实验时,先调用测试程序。上位机循环显示“休息动作”、“下翻动作”的图例来引导被试进行相应的动作,根据被试一整套“下翻动作”幅值的信息来反馈出前级的硬件放大倍数,微调采集电路中的两级运放的放大比例。
同时软件开发手部4个动作的训练范式,范式采用流程化设计,整个范式分为4个循环,共160个trail组成。每个循环有40个trail,范式动作分为握拳、展拳、手腕内翻、手腕外翻4种,每种均为10个trail,各循环的每次范式动作均为随机呈现。单次trail持续时间3 s,包含范式动作图片呈现时间2 s,休息动作呈现时间1 s。并且界面上实时显示当前trail标号,便于标记错误动作,在数据处理时排除干扰,提高识别准确率。训练范式如图5所示。
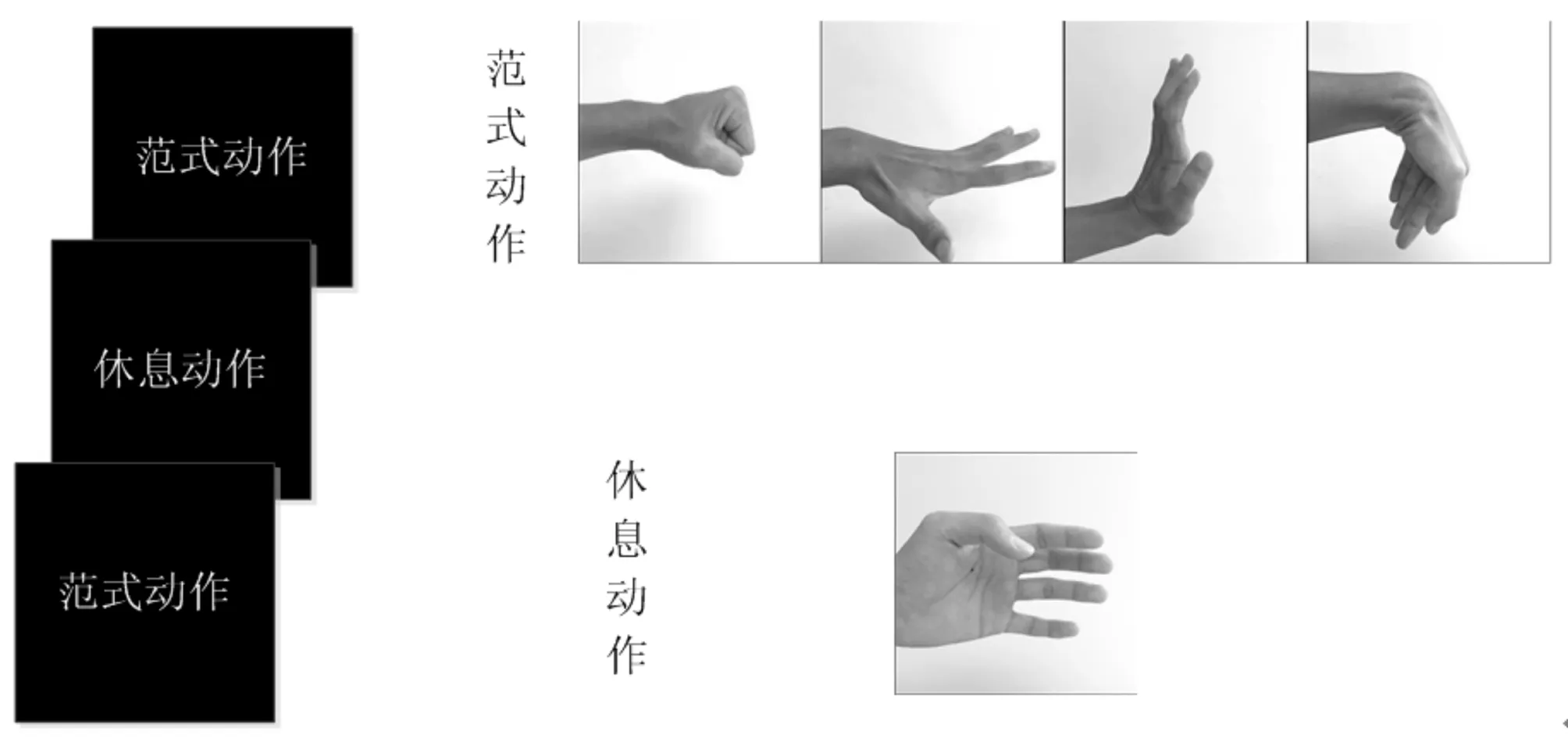
图5 训练范式图
3.3 在线识别
在上位机采集软件图形应用界面中,用户点击开始按键来触发上位机与单片机进行通讯。单片机接收到消息后,启动初始化程序,开始采集肌电数据。
目前肌电模式识别所采用信号的特征选取一般倾向于尝试使用各种特征提取方法,然后选择满足系统要求的最优肌电信号特征。这些特征包括时域(time domain, TD)特征、频域(frequency domain, FD)特征,以及时频域(time-frequency domain, TFD)特征[9]等。肌电动作的识别,大多采用BP神经网络、朴素贝叶斯、支持向量机分类器等经典的离线算法,离线算法虽然可以使识别率达92%左右[10],但无法做到实时控制,实时性不高。因而针对肌电特点、提高肌电识别的实时性与实用性,本系统使用在线识别算法。
识别的准确度与特征矢量的选取有着密切的关系,对表面肌电信号的动作识别方法通常在时域或在频域中分析数据,实验表明不同的动作下肌电信号的均方根变化很明显,因而本设计采用表面肌电的均方根信息来识别动作。均方根(root mean square,RMS):先求信号幅值的平方,然后使用一个长度为n的移动窗口进行计算,RMS的值由下式算出[11]
(8)
程序中采用阈值判别法,其中四组动作的阈值信息根据每名被试的训练数据得出,并引入肌电信号的时域信息来增强判别准确度。识别程序的流程如图6所示。

图6 识别系统流程图
4 实验测试结果
本次实验差分电极贴在小臂内侧、参考电极贴在手肘外侧。测试表明,表面肌电采集系统的放大滤波部分可以完整的采集到肌电信号,如图7(a)所示。完成不同的手部动作时,肌电收缩强度、持续时间差异较为明显。图7(b)为均方根算法中移动窗口N=600时采集到的4种动作下肌电信号的均方根走势图,图中横坐标表示时间、纵坐标表示均方根,从图中可以看出不同动作的差异比较明显。
本系统实验测试中共采集7名被试(均为健康大学生、右利手)的肌电数据。实验表明,肌电信号受电极位置、放大倍数的影响较大,不同被试数据差异明显。但同一被试、同样电极位置、放大倍数,相同动作的肌电信号比较稳定。识别率如表1所示,平均识别率84.37%,其中握拳达到 88.92%正确率,展拳达到 78.93%正确率,手腕内翻达到 80%正确率,手腕外翻89.64%。

图7 肌电放大器采集数据

被试不同试验任务分类率握拳(M=40)展拳(M=40)上翻(M=40)下翻(M=40)S134313135S238293235S333343336S437343136S536313538S638313136S733313135平均分类率88.92%+5.56%78.93%+4.53%80%+3.82%89.64%+2.67%
实验中为验证系统的稳定性,设计赛道以及智能小车作为受控对象,如图8所示。用手部动作控制小车在赛道上进行有任务的训练,握拳、展拳控制小车左右转向,手掌上翻、下翻控制小车的前进、后退。设计不同模式的小车行径路线,实验表明本系统稳定性良好,可以完整的完成各种模式的任务。

图8 稳定性测试赛道、小车
5 讨论
本肌电采集设备稳定性较高,在线识别率比较稳定,识别效果较好,而且大大降低了电路复杂度和开发成本。针对不同的被试微调放大倍数、先训练再识别,有效的提高了识别率。实验中所设计的带任务的受控小车,对上肢的康复训练有较为明显的效果。本设计也为肌电信号的进一步研究奠定了实践平台。
[1] 胡 巍,赵章琰,路知远,等.无线多通道表面肌电信号采集系统设计[J].电子测量与仪器学报,2009,23 (11):30-35.
[2]HargroveL.,EnglehartK.,HudginsB.AComparisonofSurfaceandIntramuscularMyoelectricSignalClassification[J].IEEETransactionsonBiomedicalEngineering. 2007,54(5): 847-853.
[3] 韩晓新.表面肌电信号采集电路的设计[J]. 计算机测量与控制, 2011,19(7):1778-1780.
[4] 朱 昊,辛长宇,吉小军,等. 表面肌电信号前端处理电路与采集系统设计[J]. 测控技术,2008,27(3):37-39.
[5] 连全文,冯全源. 两级运放中共模反馈电路的分析与设计[J]. 微电子学, 2010,40(1):29-32.
[6]DE约翰逊. 有源滤波器精确设计手册[M].北京:电子工业出版社,1985.
[7] 陈国庆,方康玲,刘 宇,等.一种精密有缘绝对值电路的改进与应用 [J].武汉科技大学学报(自然科学版),2005,28(4):369-371,402.
[8] 杨 鹏,孙 乐.基于WindowsCE的嵌入式多生理参数采集显示系统[J].计算机测量与控制,2011,19 (5):1173-1177.
[9]OskoeiMA,HuH.Supportvectormachine-basedclassificationschemeformyoelectriccontrolappliedtoupperlimb[J].IEEETransactionsonBiomedicalEngineering,2008,55(8):1956-1965.
[10] 于 擎,杨基海,陈 香,等.基于BP神经网络的手势动作表面肌电信号的模式识别[J].生物医学工程研究,2009,28(1):06-10.
[11] 侯文生,许 蓉,郑小林,等. 握力大小与前臂肌肉表面肌电活动模式的相关性研究[J].航天医学与医学工程,2007, 20 (4):264-268.
Collection and Online Identification System of sEMG
He Keren1,2, Sun Wei1,2, Luo Jinhong3, Zou Lin1,2
(1.Faculty of Information Science & Engineering, Changzhou University, Changzhou 213164, China;2.Changzhou Key Laboratory of Biomedical Information Technology, Changzhou 213164, China;3.Changzhou College of Information Technology, Changzhou 213164, China)
The system is designed to real-time acquire and online identify high-resolution sEMG signals conveniently. The hardware section consists of a two-stage amplifier, a band pass filter, a precision rectifier, a 16-bit analog to digital converter ADS1120 and an AVR microcontroller. The software section is programmed by Java. It realizes the functions of real-time filtering, displaying and storing sEMG signals, online indentifying the hand motion. The gain of the amplifier is adjustable in the range of 100~2 500.The resolution of the system reaches 0.3 μV when the gain is set to 1 000. What’s more, a paradigm is designed to train the subjects before online identification to improve the classification rate. The experimental results showed that the system has good stability, which can identify the four types of hand motion accurately, and the average recognition rate is 84.37%.
sEMG; collection; online identification
2015-09-28;
2015-10-30。
国家自然基金项目(61201096);常州市科技项目(CE20145055);江苏省青蓝工程资助。
何可人(1979-),男,常州人,硕士,副教授,硕士研究生导师,主要从事嵌入式系统应用方向的研究。
通迅作者:邹 凌(1975-),女,常州人,博士,教授,硕士研究生导师,主要从事脑机接口方向的研究。
1671-4598(2016)03-0241-03
10.16526/j.cnki.11-4762/tp.2016.03.066
TP274
A
猜你喜欢
小学生学习指导(中年级)(2022年9期)2022-09-30
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年1期)2022-03-23
成都信息工程大学学报(2021年4期)2021-11-22
科技传播(2019年24期)2019-06-15
数学大王·低年级(2018年8期)2018-09-03
北京航空航天大学学报(2017年9期)2017-12-18
新高考·英语进阶(高二高三)(2016年4期)2016-09-19
现代电生理学杂志(2016年4期)2016-07-10
小雪花·成长指南(2015年5期)2015-05-25
