
群目标跟踪自适应IMM算法
2016-11-17 05:43胡国平刘进忙
哈尔滨工业大学学报 2016年10期
汪 云,胡国平,刘进忙,周 豪
(空军工程大学 防空反导学院,西安 710051)
群目标跟踪自适应IMM算法
汪 云,胡国平,刘进忙,周 豪
(空军工程大学 防空反导学院,西安 710051)
为提高对机动群目标在高量测误差下的跟踪性能,提出了一种自适应IMM群目标跟踪算法.首先,在群质心状态估计中,引入带有多重次优渐消因子的强跟踪滤波算法,提高机动阶段时对群质心状态估计的精度.其次,在扩展状态估计中,考虑量测精度对于扩展状态的影响,将量测误差和扩展状态同时纳入到量测似然函数的构建中,应用新息计算和渐消记忆迭代过程自适应更新量测误差协方差矩阵.最后,通过quasi-Bayesian方法自适应更新模型转换概率,利用量测数据修正模型转换概率,抑制非匹配模型作用,放大匹配模型作用,实时匹配跟踪模型与目标运动状态.仿真实验结果表明,该方法有效提高了对群质心状态和扩展状态的估计精度.
群目标;模型转换概率;强跟踪;质心状态;扩展状态
群目标跟踪场景,如机群编队和地面移动车队,一系列拥有类似运动方式的空间临近目标组成跟踪对象.在群目标跟踪问题中,群目标的量测数目是时变的,传统多目标跟踪算法难以实现对群目标的稳定跟踪[1].文献[2]按照群内目标数目将群目标跟踪分成两类:大群目标跟踪和小群目标跟踪.其中大群目标主要是指:由大量目标组成,并由此导致无法跟踪全部个体目标而仅适合跟踪群整体状态的群目标类型;而小群目标主要是指:由相对较少的目标组成,在估计群整体状态的同时又可跟踪群内个体目标的群目标类型.学者针对大群目标跟踪,采用群整体跟踪方法,该方法主要有两类算法:概率密度假设(PHD)滤波算法[3-4]和贝叶斯递推算法.PHD滤波算法可用于多群目标的跟踪问题,解决群内目标数目未知和数据关联问题[5-7].它的缺点是无法内在区分假设密度传播中哪部分是由于估计不确定产生的,并且算法较为复杂,不利于实际工程应用.Koch[1]推导了群目标的贝叶斯递推算法,提出利用随机矩阵描述群的扩展状态,基于群的质心状态跟踪,实现对群整体运动的跟踪,有效地解决了单群目标的跟踪问题,但它忽略了量测误差对扩展状态的影响.文献[8]在IMM算法框架下,采用启发式近似方法,考虑量测误差情况,实现了对单群目标的有效跟踪,但它没有考虑对群目标强机动情况进行处理.文献[9]在文献[8]的基础上,利用变分贝叶斯迭代方法进行量测更新,提高了跟踪精度,但其模型转换概率需要先验设定,与复杂群目标运动模式不相符.
本文重点针对机动单群目标在高量测噪声环境中的整体跟踪问题,提出了群目标跟踪自适应IMM算法.其中,使用强跟踪算法修正群目标机动时的质心状态,基于新息计算更新量测误差协方差修正对群扩展状态的描述,利用量测数据修正quasi-Bayesian方法自适应更新后的模型转换概率.最后仿真验证本文算法的有效性.
1 基于随机矩阵的群跟踪算法
将多个目标跟踪问题等效成单个群整体跟踪问题,跟踪群目标的质心状态和扩展状态,群目标的每个量测等效为群质心量测扩展状态下散射的结果[10].
1.1 量测似然函数构建

但是和形式难以进行贝叶斯推导,故常采用如下变换形式[11]:


(1)

通过数学推导,式(1)可以写为[11]
(2)
(3)
式(3)表示均值为aA的Wishart分布函数.其中,d为SPD矩阵X的维数,a为自由度且满足a≥d,A为协方差矩阵,etr(·)为exp(tr(·))的缩写.
1.2 群状态联合先验概率密度函数构建
xk和Xk的联合先验概率密度函数为
向量xk的条件概率密度函数为

矩阵Xk的条件概率密度函数为
(4)
(5)

因此,对应的Bayesian滤波的一步预测公式为
(6)
(7)
扩展状态的预测公式[1]为
1.3 群状态联合后验概率密度函数构建
xk和Xk的联合后验概率密度函数为
量测转移矩阵为
新息协方差为
滤波增益为
对应的Bayesian滤波的运动状态更新公式为
扩展状态量测更新公式为
(8)
(9)
需要指明的是,群质心的条件后验概率密度p(xk|Xk,Zk)不能直接估计扩展状态Xk|k和质心的误差协方差Var(xk|Zk).

而Var(xk|Zk)可由p(xk|Zk)估计得到[9]:
2 群目标跟踪问题及解决方法
2.1 问题分析
对现有的单群跟踪IMM算法进行分析,主要存在以下问题:1)群质心状态估计在目标机动时误差增大;2)量测噪声和扩展自由度的先验设定,不能实时描述目标扩展状态的变化;3)转换概率矩阵的先验设定,不能随目标运动模式的变化进行自适应调整.
基于上述问题分析,在群质心状态估计中,引入带有多重次优渐消因子的强跟踪滤波算法,提高机动阶段时对群质心状态估计精度;在扩展状态估计中,考虑量测精度对于扩展状态的影响,将量测误差协方差和扩展状态同时纳入到量测似然函数的构建中,并且基于新息计算和渐消记忆迭代过程自适应更新量测误差协方差矩阵;通过quasi-Bayesian方法自适应更新模型转换概率的算法,并且利用量测数据修正模型转换概率,抑制非匹配模型的作用,放大匹配模型的作用,优化模型与目标运动模式的实时匹配.
2.2 多重次优渐消强跟踪算法
强迫输出残差近似高斯白噪声,根据目标运动情况实时调整增益,设置的渐消因子为[13]
其中:
式中:γ(k)为新息;γ(1)为初始新息;ρ(0<ρ≤1)为遗忘因子,一般取ρ=0.95;ξ(ξ≥1)为弱化因子,可以使状态估计值更加平滑.
对多重次优渐消因子Ak进行Cholesky分解可得:

2.3 自适应量测噪声估计
当群内目标数目较大时,传感器获得大量目标量测数据,对量测数据的处理显得尤为重要,因此必须考虑传感器的量测精度对扩展状态估计的影响.

而量测噪声协方差矩阵通常先验设定,这与复杂群目标跟踪环境不相符,因此基于渐消记忆迭代过程,充分利用新息和最近时刻的量测值,自适应更新测量误差协方差矩阵[14]:
式中,φ(0<φ≤1)为遗忘因子,一般取φ=0.95.
2.4 模型转换概率自适应算法
为了实时估计模型的转换概率矩阵,使用quasi-Bayesian方法能在计算量和估计精度上取得较好的平衡[15].

因此,最小均方根误差下的模型转换概率矩阵估计为
初始化参数为
∂i(0)=[αi1(0),…,αim(0)]T,

递推过程为
在IMM算法中,概率越大的子模型与真实的目标运动模式匹配程度越高,其他子模型向这一子模型转移的概率应越大.可以充分利用当前的量测,在线更新IMM算法中模型转移概率,使之符合实际跟踪场景.
考虑到转移概率值的非负性,取对数形式的模型[16]概率变化率为
归一化后的转移概率计算公式为
3 群目标跟踪自适应IMM算法
使用m个子模型进行跟踪,群目标跟踪自适应IMM算法递推步骤如下.
Step 1 模型条件初始化.



2)混合估计.

(10)
(11)

(12)
Step 2 模型条件滤波.
其中:


其中
Step3 模型概率和转移概率矩阵更新.
Step 4 估计融合.
4 仿真实验


它的运动轨迹如图1所示,其中黑色的实点表示群目标真实量测,椭圆代表群扩展状态在置信水平为0.9时的置信区域.
将本文改进的群目标跟踪自适应IMM算法(简称为IMM3)对比文献[8-9]中的算法(简称为IMM1和IMM2),进行100次Monte-Carlo仿真实验.图2,3分别给出了3种算法的群质心位置和速度估计的RMSE比较结果.从图中结果可知,本文提出的IMM3算法在目标作匀速运动时期内,滤波精度与IMM1和IMM2算法相当.在群目标作机动的9~10s、17~20s和27~34s段时间内,IMM2算法通过采用变分贝叶斯迭代法,增加了对无噪量测的联合估计,滤波精度高于IMM1算法.而IMM3算法的滤波精度明显要高于IMM1算法和IMM2算法,由于本文算法在状态预测协方差中引入多重次优渐消因子,可在线实时调整增益矩阵,因而具有较强的模型失配的鲁棒性和突变状态的跟踪能力.

图1 密集群目标的运动轨迹

图2 群质心位置均方根误差
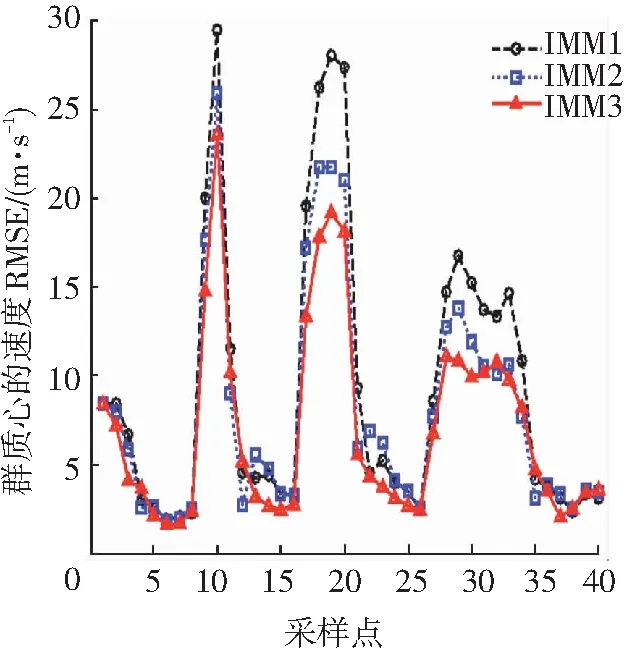
图3 群质心速度均方根误差
图4比较了3种算法群扩展状态估计的均方根误差,计算公式为[8]
由图2,3可知,IMM2算法由于利用变分贝叶斯推导方法,增加了对无噪量测的联合估计,将传感器量测误差合理纳入到滤波方程中,对扩展状态的估计要优于IMM1算法.而本文提出的IMM3算法,把量测误差和扩展状态同时纳入到量测似然函数的构建中,基于新息计算和渐消记忆迭代过程自适应更新量测误差协方差,提高了对扩展状态的估计精度,仿真效果最优.

图4 扩展状态均方根误差
图5给出了3种算法的模型概率变化对比.在群目标匀速运动的阶段,过程噪声和扩展状态灵敏度都较低,目标运动状态与模型CV1更为匹配;而在机动阶段,过程噪声和扩展状态灵敏度都偏高,目标运动状态与模型CV3更为匹配.本文算法利用量测数据自适应修正模型转换概率,放大匹配模型的作用,抑制非匹配模型的作用,优化模型与目标运动模式的实时匹配.从图5中结果可看出,本文算法在选取匹配模型时的模型概率更高.

图5 模型概率变化曲线
表1是3种方法的平均跟踪误差对比,可以看出本文所提出的群目标跟踪自适应IMM算法,滤波精度最高.

表1 平均跟踪误差对比
表2给出了3种算法的平均单步运行时间比较,从表2中结果可知,IMM1算法的运行时间最短,IMM2由于增加了变分贝叶斯迭代滤波环节,因此运行时间要高于IMM1算法,而本文算法自适应更新概率转换矩阵并且计算渐消因子,因而花费更对的时间,但是跟踪精度最高.
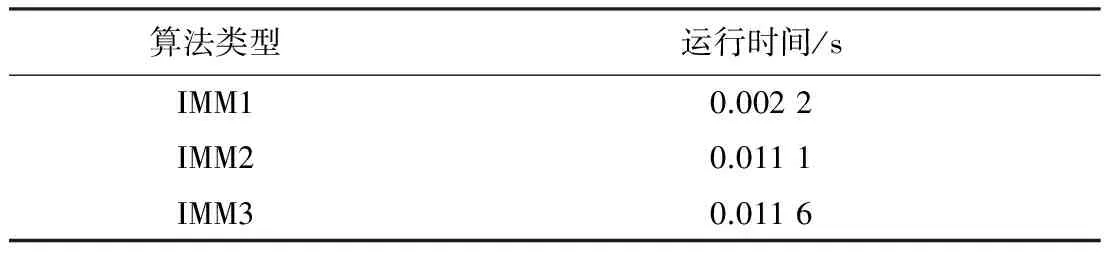
表2 平均单步运行时间比较
综合考虑算法的精度和时间,本文所提出的群目标跟踪自适应IMM算法,具有更好的性能.
5 结 论
1)引入带有多重次优渐消因子的强跟踪滤波算法修正群质心状态估计,基于新息计算和渐消记忆迭代过程自适应更新量测误差协方差矩阵.
2)量测似然函数的构建纳入量测精度影响,优化扩展状态估计;通过quasi-Bayesian方法自适应更新模型转换概率,利用量测数据修正模型转换概率,优化模型与目标运动模式的实时匹配.仿真实验结果表明,与两种方法对比,本文方法具有较好的自适应跟踪能力.
[1] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042-1059. DOI: 10.1109/TAES.2008.4655362.
[2] MIHAYLOVA L, CARMI A Y, SEPTIER F. Overview of Bayesian sequential Monte Carlo methods for group and extended object tracking[J]. Digital Signal Processing, 2014, 25: 1-16.DOI:10.1016/j.dsp.2013.11.006.
[3] MAHLER R. PHD filters of higher order in target number [J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523-1543.DOI: 10.1109/TAES.2007.4441756.
[4] 连峰,韩崇昭,刘伟峰, 等. 基于SMC-PHDF的部分可分辨的群目标跟踪算法[J].自动化学报,2010,36(5):731-741.DOI: 10.3724/SP.J.1004.2010.00731.
LIAN Feng, HAN Chongzhao, LIU Weifeng, et al. Tracking partly resolvable group targets using SMC-PHDF [J]. ACTA Automatica Sinica,2010,36(5):731-741. DOI: 10.3724/SP.J.1004.2010.00731.
[5] GRANSTRÖM K, LUNDQUIST C, ORGUNER U. Extended target tracking using a Gaussian mixture PHD filter [J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3268-3285.DOI: 10.1109/TAES.2012.6324703.
[6] GRANSTRÖMK, ORGUNER U. A PHD filter for tracking multiple extended targets using random matrices[J]. IEEE Transactions on Signal Processing, 2012, 60(11): 5657-5671.DOI: 10.1109/TSP.2012.2212888.
[7] GRANSTRÖM K, ORGUNER U. On spawning and combination of extended/group targets modeled with random matrices [J]. IEEE Transactions on Signal Processing, 2013, 61(3): 678-692. DOI: 10.1109/TSP.2012.2230171
[8] FELDMANN M, FRANKEN D, KOCH W. Tracking of extended objects and group targets using random matrices [J]. IEEE Transactions on Signal Processing, 2011, 59(4):1409-1420. DOI: 10.1109/TSP.2010.2101064.
[9] ORGUNER U. A variational measurement update for extended target tracking with random matrices[J]. IEEE Transactions on Signal Processing, 2012, 60(7):3827-3834.DOI: 10.1109/TSP.2012.2192927.
[10]FELDMANN M, KOCH W. Comments on "Bayesian approach to extended object and cluster tracking using random matrices"[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 1687-1693.DOI: 10.1109/TAES.2012.6178088.
[11]LAN Jian, LI X R. Tracking of extended object or target group using random matrix-Part I: New model and approach[C]//Proceedings of the 15th Inter-national Conference on Information Fusion. Singapore: IEEE, 2012: 2177-2184.
[12]周聪,肖健.改进强跟踪滤波算法及其在汽车状态估计中的应用[J].自动化学报,2012,38(9):1520-1527.DOI: 10.3724/SP.J.1004.2012.01520.
ZHOU Cong, XIAO Jian. Improved strong track filter and its application to vehicle state estimation [J]. ACTA Automatica Sinica,2012,38(9):1520-1527.DOI: 10.3724/SP.J.1004.2012.01520.
[13]李振兴,刘进忙,李松,等.一种改进的群目标自适应跟踪算法[J].哈尔滨工业大学学报,2014,46(10):117-123.
LI Zhenxing, LIU Jinmang, LI Song, et al. An improved adaptive tracking algorithm for group targets [J]. Journal of Harbin Institute of Technology,2014,46(10):117-123.
[14]DASHP K, HASAN S, PANIGRAHI B K. Adaptive complex unscented kalman filter for frequency estimation of time-varying signals [J]. IET Science, Measurement & Technology, 2010,4(2):93-103. DOI:10.1049/iet-smt.2009.0003.
[15]JILKOV V P, LI X R. Online Bayesian estimation of transition probabilities for markovian jump systems [J]. IEEE Transactions on Signal Processing, 2004, 52(6):1620-1630. DOI: 10.1109/TSP.2004.827145.
[16]郭志,董春云,蔡远利,等. 时变转移概率IMM-SRCKF机动目标跟踪算法 [J].系统工程与电子技术,2015,37(1):24-30.DOI: 10.3969/j.issn.1001-506X.2015.01.05.
GUO Zhi, DONG Chunyun, CAI Yuanli, et al. Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking [J]. Systems Engineering and Electronics,2015,37(1):24-30.DOI: 10.3969/j.issn.1001-506X.2015.01.05.
[17]LI X R, JILKOV V P. Survey of maneuvering target tracking, part I: dynamic models [J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1333-1364.DOI: 10.1109/TAES.2003.1261132.
(编辑 张 红)
Adaptive IMM tracking algorithm of group targets
WANG Yun, HU Guoping, LIU Jinmang, ZHOU Hao
(Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China)
This paper proposes an adaptive interactive multiple models (IMM) tracking algorithm in order to improve tracking performance of strong maneuvering group targets in high measurement error. First of all, we introduce a strong tracking filtering algorithm with multiple suboptimal fading factors to improve the estimation accuracy of the group centroid in the strong maneuvering stage. Secondly, considering the influence of measurement accuracy on the extension state, the measurement error and extension state are formulated in a likelihood function, and then the error covariance of the measurement can be adaptively updated by using the innovation and the memory fading iterative process. Finally, we use the quasi-Bayesian approach to adaptively update the model transition probability. The model transition probability is modified by the measurement to suppress the non-matching model and amplify the matching model. By this way, the tracking model and targets state can be matched in real time. The simulation results show that, the proposed method is effective to improve the estimation accuracy of the centroid state and the extension state.
group targets; model transition probability; strong tracking; centroid state; extension state
10.11918/j.issn.0367-6234.2016.10.015
2015-05-01
国家自然科学基金(61501495)
汪 云(1989—),男,博士研究生;
胡国平(1964—),男,教授,博士生导师
汪 云,yunyingxikuang@163.com
TN95
A
0367-6234(2016)10-0103-07
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
雷达学报(2017年3期)2018-01-19
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
应用科技(2015年5期)2015-12-09
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
