双轴驱动混合动力公铁牵引车建模与性能仿真
2016-11-16 05:22朱诗顺
军事交通学院学报 2016年10期
喻 剑,朱诗顺,孙 燕
(1.军事交通学院 研究生管理大队,天津 300161; 2.军事交通学院 军用车辆系,天津 300161)
● 车辆工程Vehicle Engineering
双轴驱动混合动力公铁牵引车建模与性能仿真
喻剑1,朱诗顺2,孙燕2
(1.军事交通学院 研究生管理大队,天津 300161; 2.军事交通学院 军用车辆系,天津 300161)
为模拟研究混合动力公铁牵引车性能,分析了混合动力公铁牵引车运行时的受力情况,在Simulink环境下建立整车动力学模型和双轴驱动速度控制模型、驱动力控制模型,构建了混合动力公铁牵引车仿真模型。利用该模型进行整车动力性能仿真,结果表明整车性能参数接近实测值,验证了仿真模型的合理性。
混合动力;公铁牵引车;建模仿真
进行混合动力公铁牵引车性能仿真是降低整车研发成本,缩短研发周期的重要途径。汽车仿真软件Advisor已被广泛用于电动汽车及混合动力汽车的仿真分析中,但由于最初开发条件的限制,该软件不能直接用于混合动力公铁牵引车动力性能仿真。本文针对混合动力公铁牵引车运行特点,对Advisor进行二次开发[1-2],在Simulink环境下建立混合动力公铁牵引车双轴驱动仿真模型,用于混合动力公铁牵引车的动力性与经济性仿真。
1 混合动力公铁牵引车系统结构
混合动力公铁牵引车采用串联结构型式,主要部件包括发动机、电动机、动力电池组、发电机及液压导向系统。发动机—发电机组输出功率可向动力电池组充电,也可以直接用于驱动车辆。动力电池组可以直接输出功率至驱动电机,实现纯电动行驶。公路、铁路转换行驶时,动力电池组向液压系统提供动力,传输至导向机构,完成牵引车的上轨或下轨作业,动力系统原理如图1所示。

图1 动力系统原理
2 仿真模型的建立
2.1车辆行驶受力分析
设四轮驱动混合动力公铁牵引车在坡度为α的铁路线上牵引作业,初速度为V0,末速度为Vt,加速度为a,驱动力为Ft,牵引车在行驶过程中受到空气阻力为Fw,滚动阻力为Ff,坡度阻力为Fi,加速阻力为Fj,铁路货车对牵引车的牵引阻力为Fq,牵引车铁路牵引时受力分析图如图2所示。
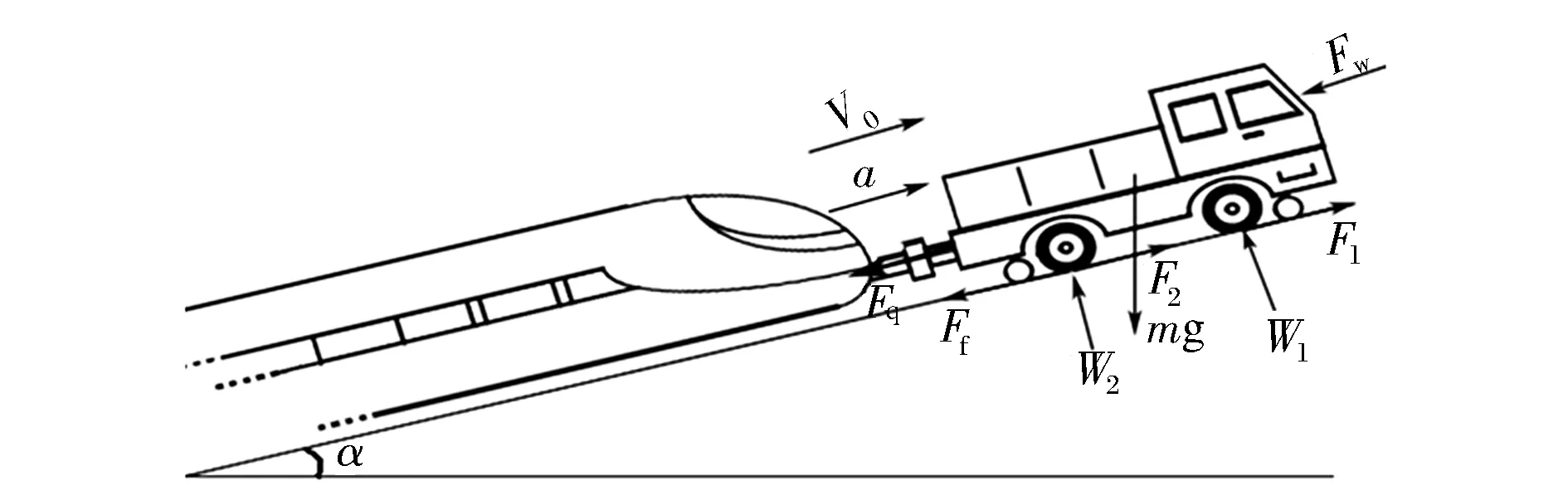
图2 双轴驱动混合动力公铁牵引车受力分析
根据汽车行驶平衡方程:
Ft-Fw-Ff-Fi-Fq=δma
(1)
牵引车极限驱动力:
Fmax=F1+F2=W1×μ+W2×μ=μmgcosα
(2)
式中:W1为牵引车前轴负荷,N;W2为牵引车后轴负荷,N;m为牵引车质量,kg;μ为黏着系数;δ为牵引车回转质量系数,δ取1.1。
其中,加速度为
(3)
平均速度为
(4)
空气阻力为
(5)
式中:ρ为空气密度,ρ= 1.225 8 N·s2·m-4;Cd为空气阻力系数;A为迎风面积,m2。
滚动阻力为
(6)
坡度阻力为
Fi=mgsinα
(7)
加速阻力为
(8)
由于牵引车在铁路线牵引作业方式为直线牵引,因此牵引阻力主要考虑运行阻力、坡度附加阻力以及加速阻力[3]。铁路牵引阻力为
Fq=W0+Wi+Wj=w0Mg+wiMg+γMa
(9)
式中:W0为被牵引货车行驶阻力,N;Wi为被牵引货车坡度阻力,N;Wj为被牵引货车加速阻力,N;γ为被牵引货车回转质量系数,取1.08;w0为行驶阻力系数;wi为坡度阻力系数;M为被牵引货车质量,kg。
其中,行驶阻力系数(空货车)为
w0=(2.23+0.005 3v+0.000 675v2)×10-3
坡度阻力系数为
wi=0.1×tanα
2.2整车模型的建立
整车模型包括前馈计算路径及后馈计算路径。前馈路径根据车轴模块传递的实际牵引力和车速,计算出下一步长的初始速度(当前步长的末速度)。依据式(1),可以得出平均车速的二次多项式方程:
Mg(w0+wi)+mg(sinα+f1cosα)-
(10)
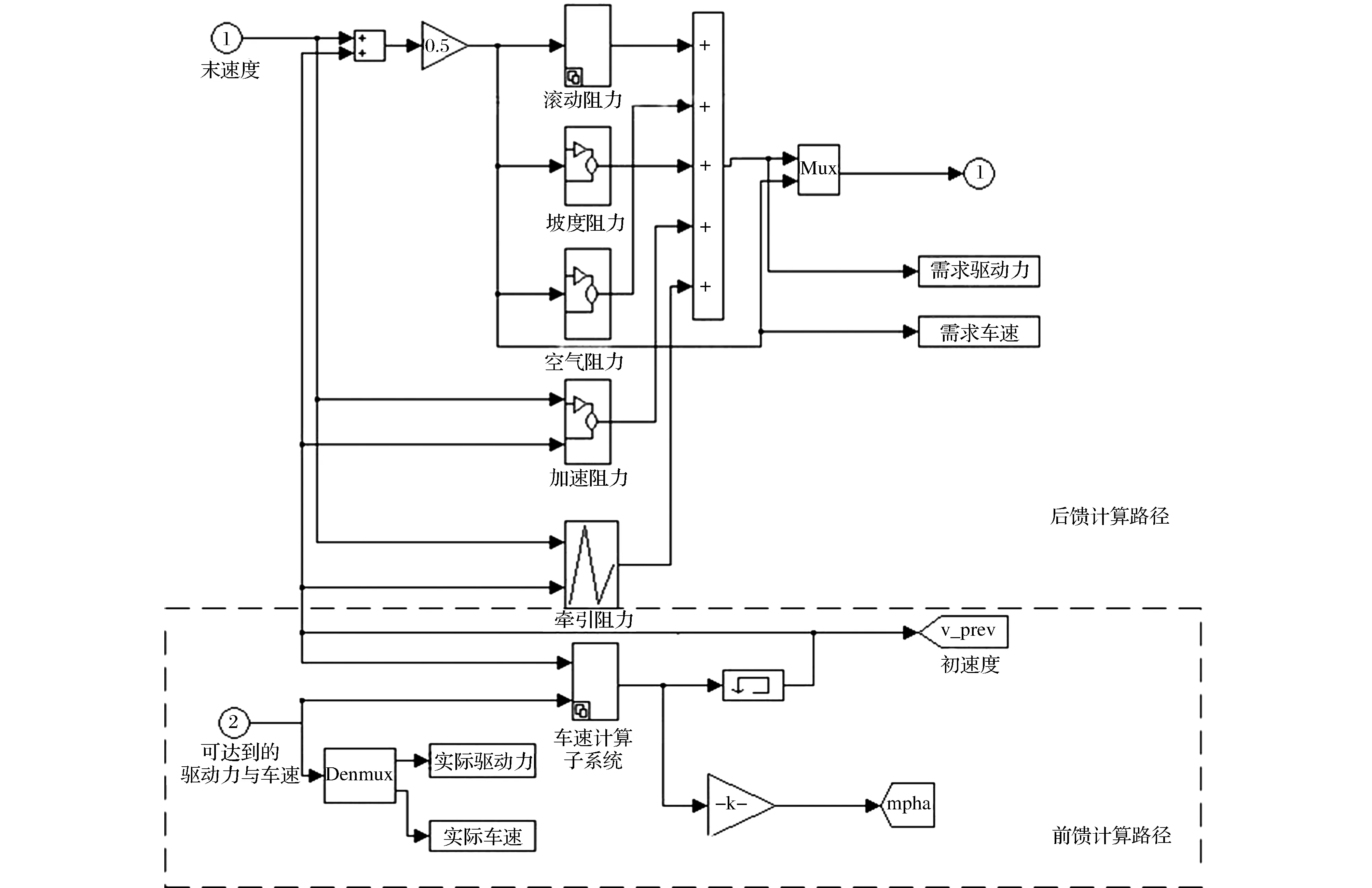
图3 整车模型
2.3双轴驱动整车控制模型的建立
Advisor仿真平台只提供前轴驱动(FWD)控制模块,需要对原整车控制模块进行修改,使其变为适用于混合动力公铁牵引车的双轴驱动(4WD)型式。该模块的建模思路是限制计算的驱动力不超过轮胎与轨道间的最大黏着力,以及限制整车速度不超过其最大驱动力所能提供的极限速度[4]。
将式(2)—(9)带入式(1)中求解,得到在车轮黏着极限时,即牵引车所能达到最大驱动力情况下能产生的最大速度Vt:

(11)
同理,当牵引车制动时,制动力达到极限黏着力,即Fmax提供制动力,方向相反。因此在牵引车达到制动黏着极限时所能达到的最小车速为
Vt′=[-mgμcosα-mg(f1cosα+sinα)-
(12)
通过上述分析,当牵引车在铁路牵引作业时,双轴驱动车速控制模块将限制牵引车速度不超过其实际运行能力。在Matlab/Simulink环境下,建立的四轮驱动车速控制模块如图4所示。
四轮驱动牵引车无论是在加速还是减速情况下,驱动轮载荷保持不变,即最大驱动力不变,整车动力性能不受影响。驱动力控制模块是限制牵引车最大驱动力不超过车轮与铁轨间的极限黏着力[5]。在Matlab/Simulink环境下,建立的整车驱动力控制模块如图5所示。
3 性能仿真
某型混合动力公铁牵引车动力系统各部件参数见表1。循环工况根据铁路牵引作业实测数据得到的铁路牵引一般循环工况(如图6所示)。

图6 铁路牵引循环工况

部件参数名称 数值发动机最大功率/kW45额定转速/(r·min-1)3200最大转矩/(N·m)165电动机额定功率/kW30额定转速/(r·min-1)1470额定转矩/(N·m)195最大转矩/(N·m)390蓄电池电池电压/V512电池容量/(A·h)120电池能量/(kW·h)45
通过仿真得到铁路牵引循环工况下的车速跟随曲线(如图7所示)。由图可见,牵引车可以很好地跟随循环工况预定车速,牵引车满载牵引最高速度可达到15 km/h。当牵引车加速至最高速度时,实际车速与需求车速有所偏差,偏差速度在0.15 km/h范围内(如图8所示)。但偏差速度不影响整车的动力性能,满足设计要求。
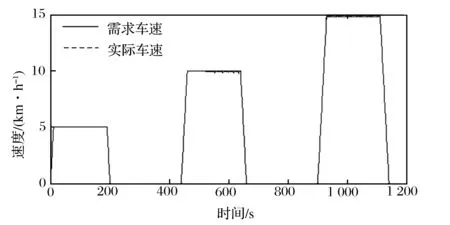
图7 车速跟随曲线

图8 速度偏差曲线
仿真得到动力电池组荷电状态(SOC)变化曲线如图9所示,由图可见,车辆在跟随预定车速行驶过程中,车辆在牵引起步时,SOC下降较快;车辆匀速牵引车,SOC下降较为平缓。由于采用能量回收控制策略,在车辆制动时,SOC值略有上升。因此,动力电池组荷电状态仿真结果符合实际使用情况。

图9 荷电状态变化曲线
为了验证仿真模型的合理性,进行了同吨位混合动力公铁牵引车与内燃公铁牵引车动力性比较,其结果见表2。由表2可知,混合动力公铁牵引车性能仿真结果与内燃公铁牵引车实测结果基本接近。其中爬坡性能相一致,最大爬坡度为12%,满载加速时间偏差最大,为7.5%。由此可见,动力性仿真结果较为准确,验证了混合动力公铁牵引车模型的合理性。
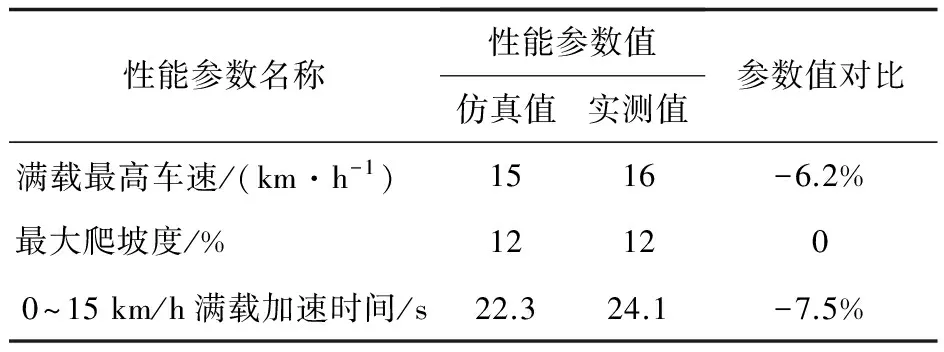
表2 同吨位混合动力公铁牵引车与内燃公铁牵引车动力性比较
4 结 语
针对混合动力公铁牵引车设计需要,对其进行了受力分析,在Matlab/Simulink环境下通过建立整车模型、双轴驱动速度控制模型、驱动力控制模型,构建了适用于混合动力公铁牵引车动力性仿真模型。利用该仿真模型,对混合动力公铁牵引车进行仿真。结果表明,整车动力性能符合设计要求,且动力电池组荷电状态始终保持在合理范围,能量回收控制策略效果明显。通过同吨位混合动力公铁牵引车与内燃公铁牵引车动力性能比较,验证了仿真模型的合理性。
[1]朱诗顺,任永乐,郭猛超,等.多轮驱动混合动力车辆的建模与仿真[J].汽车工程,2009(9):829-833.
[2]朱诗顺,王星博,骆素君,等.基于ADVISOR的4轴全轮驱动车辆驱动系统仿真模块的开发[J].汽车工程,2008(12):1075-1078.
[3]TB/T 1407-1998, 列车牵引计算规程[S].
[4]张宝迪,张欣,席利贺,等.混合动力推土机建模与全工况经济性仿真[J].农业机械学报,2015(6):294-302.
[5]SAME A, STIPE A. A study on optimization of hybrid drive train using advanced vehicle(ADVISOR)[J].Journal of Power Sources,2010,195(19):6854-6963.
(编辑:张峰)
Modeling and Performance Simulation of Two-axle-drive Hybrid Road-rail Towing Tractor
YU Jian1, ZHU Shishun2, SUN Yan2
(1.Postgraduate Training Brigade, Military Transportation University, Tianjin 300161, China;2.Military Vehicle Department, Military Transportation University, Tianjin 300161, China)
To simulate the performance of hybrid road-rail towing tractor, the paper analyzes its force condition at runtime, and establishes whole vehicle dynamics model, two-axle-drive speed control model and driving force control model under Simulink. It also establishes hybrid road-rail towing tractor simulation model, and simulates the dynamics performance of the whole vehicle with this model. The result shows that the performance parameter of whole vehicle is close to the measured value, which can verify the reasonability of the simulation model.
hybrid; road-rail towing tractor; modeling simulation
2016-05-27;
2016-08-29.
2014年企业合作项目.
喻剑(1991—),男,硕士研究生;
朱诗顺(1960—),男,博士,教授,博士研究生导师.
10.16807/j.cnki.12-1372/e.2016.10.011
U464.173
A
1674-2192(2016)10- 0044- 05
猜你喜欢
商用汽车(2022年7期)2022-10-11
小哥白尼(趣味科学)(2021年6期)2021-11-02
中国核电(2021年3期)2021-08-13
北京汽车(2021年2期)2021-05-07
大江南北(2019年11期)2019-11-12
中国外汇(2019年9期)2019-07-13
劳动保护(2019年3期)2019-05-16
专用汽车(2018年10期)2018-11-02
家庭影院技术(2018年9期)2018-11-02
家庭影院技术(2018年3期)2018-05-09