
高斯混合交互式多模型容积信息滤波算法
2016-11-15 06:33谢会来刘以安
传感器与微系统 2016年10期
谢会来, 刘以安, 王 刚, 彭 愫
(1.江南大学 物联网工程学院,江苏 无锡 214122;2.中国舰船研究院,北京 100192;3.武汉理工大学 信息工程学院,湖北 武汉 430063)
高斯混合交互式多模型容积信息滤波算法
谢会来1, 刘以安1, 王 刚2, 彭 愫3
(1.江南大学 物联网工程学院,江苏 无锡 214122;2.中国舰船研究院,北京 100192;3.武汉理工大学 信息工程学院,湖北 武汉 430063)
针对机动目标跟踪中由于目标机动使系统的非线性强度增大,导致系统的线性误差增大和跟踪精度明显下降、甚至发散的问题,提出了基于高斯混合的交互式多模型容积信息滤波(GMIMM-CIF)算法,实现对机动目标的精确跟踪。新算法在每次输入交互之后,保留概率较大的几个假设,并利用一个高斯混合项替换最优多模型算法中剩余的假设,从而使算法中假设的数量保持恒定;用容积信息滤波器(CIF)代替传统的非线性滤波器,通过估计信息状态向量和信息矩阵而不是估计状态向量和协方差,可以减小系统的非线性误差。通过仿真对比实验,验证了该算法可以提高机动目标的跟踪精度。
机动目标跟踪; 高斯混合; 交互式多模型; 容积信息滤波
0 引 言
机动目标跟踪是利用探测器所获得的运动目标的量测,估计目标的位置和速度等运动状态,在国防与民用领域具有重要的应用价值。目前应用较为普遍的是交互式多模型(IMM),这种算法原理清晰、结构简单、运算量相对适中,广泛应用于目标跟踪等领域[1]。缺点是模型先验概率、模型转移概率以及模型集的组成均无法先验确知;不合理的假设,导致算法得到的目标状态估计始终只能是混和次优解。为了提高IMM算法的性能,设计了许多非线性滤波器,如交互式多模型容积卡尔曼滤波器(IMM-CKF)[2,3]、交互式多模型无迹卡尔曼滤波器(IMM-UKF)[4]。
文献[5]提出了交互式多模型容积信息滤波(IMM-CIF)算法,CIF算法通过估计信息状态向量和信息矩阵,可以减少系统的非线性误差;IMM算法通过马尔可夫链同时处理所有模型,从而提高滤波器的快速反应能力[6,7]。文献[8]提出了基于高斯混合的交互式多模型(GMIMM)算法,它是在最优多模型滤波算法的基础上,每次交互之后,只保留其中概率较大的几种假设,将其余的假设合并为一种假设,使系统中假设的数量保持恒定,从而避免了最优多模型滤波算法中假设的数量呈指数增长的问题。与IMM算法相比,GMIMM算法具有更高的跟踪精度。
为了提高机动目标的跟踪精度,本文提出了基于高斯混合的交互式多模型容积信息滤波(GMIMM-CIF)算法。GMIMM-CIF算法在输入交互完成之后,保留其中r种概率较大的假设,将剩余的假设合并为一个假设,然后将这r+1种假设作为CIF的输入进行模型匹配滤波,在每个滤波周期结束之后,将联合状态估计和协方差一同反馈。CIF算法估计信息向量和信息矩阵,它通过信息空间进行传播使得滤波器更容易初始化。仿真结果表明:GMIMM-CIF算法比GMIMM-CKF、IMM-CIF和IMM-CKF更准确、鲁棒性更强。
1 CIF算法
CIF算法通过估计信息状态向量和信息矩阵,包括时间更新与测量更新两个步骤。
1.1 时间更新
(1)
式中 Sk-1|k-1为k-1时刻开方值,它可以通过k-1时刻信息矩阵的逆矩阵[Yk-1|k-1]-1进行求解,并用于计算k-1时刻第i个容积点Xi,k-1|k-1,即
(2)
(3)

(4)
(5)

(6)
(7)
1.2 测量更新

(8)
式中 Sk|k-1为k-1时刻一步开方值,它可以通过k-1时刻一步预测信息矩阵的逆矩阵[Yk|k-1]-1进行求解。k-1时刻第i个一步容积点的计算公式为
(9)
k-1时刻第i个一步传播容积点的计算公式为
Zi,k|k-1=h(Xi,k|k-1)
(10)
(11)
k-1时刻互协方差矩阵Pxz,k|k-1的计算公式为
(12)
通过式(6)和式(12)求解得到
(13)
(14)
Yk|k=Yk|k-1+Ik
(15)
(16)
(17)
(18)
式中In为维数为的单位矩阵。
2 GMIMM-CIF算法
GMIMM-CIF算法的每一个循环过程包括输入交互、高斯混合、模型匹配滤波、模型概率更新和输出交互5步骤。
2.1 输入交互
k-1时刻的输入为
(19)
k-1时刻每一个单高斯分量的概率ui,l|j(k-1)的计算公式为
(20)
(21)
k-1时刻模型j混合后的协方差的计算公式为
(22)
2.2 高斯混合
通过上述的输入交互过程,模型j产生(r+1)m个混合项,选择其中r项概率较大的混合项,并且将剩余的混合项合并为一项,混合后的结果为
(23)
2.3 模型匹配滤波(CIF滤波)
2.4 模型概率更新
k时刻模型中第l个混合项的后验概率的计算公式为
(24)
式中 标准化常量c为
(25)
2.5 输出交互
每种模型的滤波器输出是一个高斯分布的加权组合,但这里混合项的总数翻了1倍,因为在每个模型中有多个高斯混合项,输出平均值的计算公式为
(26)
协方差的计算公式为
(27)

(28)
模型概率uj(k)通过每个模型中相应的混合项的概率求和获得
(29)
3 仿真分析
3.1 仿真初始条件设定
仿真场景中,目标与传感器在二维平面内运动。假设目标的初始位置为(12 000,0)m,初始速度为8节(4.12 m/s),初始航向角为225°,在30~35 s做顺时针110°的转弯运动,在65~70 s做逆时针110°的转弯运动,两次的转弯速度都为ω=0.375°/s,其余时间做匀速直线运动。假设传感器的初始位置为(0,4 500)m,初始速度为10节(5.15 m/s),初始航向角为180°,在10,45,75 s传感器向不同的方向做转弯运动,其余时间做直线运动,目标传感器的真实航迹如图1所示。
图1 目标与传感器的运动轨迹Fig 1 Motion trail of target and sensor
传感器的采样间隔为T=12s,匀速直线运动阶段的过程噪声功率谱密度为1×10-5m2/s3,转弯运动阶段的过程噪声功率谱密度为7.5×10-7rad2/s3。传感器测量方位、距离误差的标准差分别为σβ=1°,σd=20m。
3.2 仿真结果分析
图2~图3是用GMIMM-CIF、GMIMM-CKF、IMM-CIF和IMM-CKF算法经过20次蒙特卡洛仿真后得到的位置、速度均方根误差(RMSE)曲线。
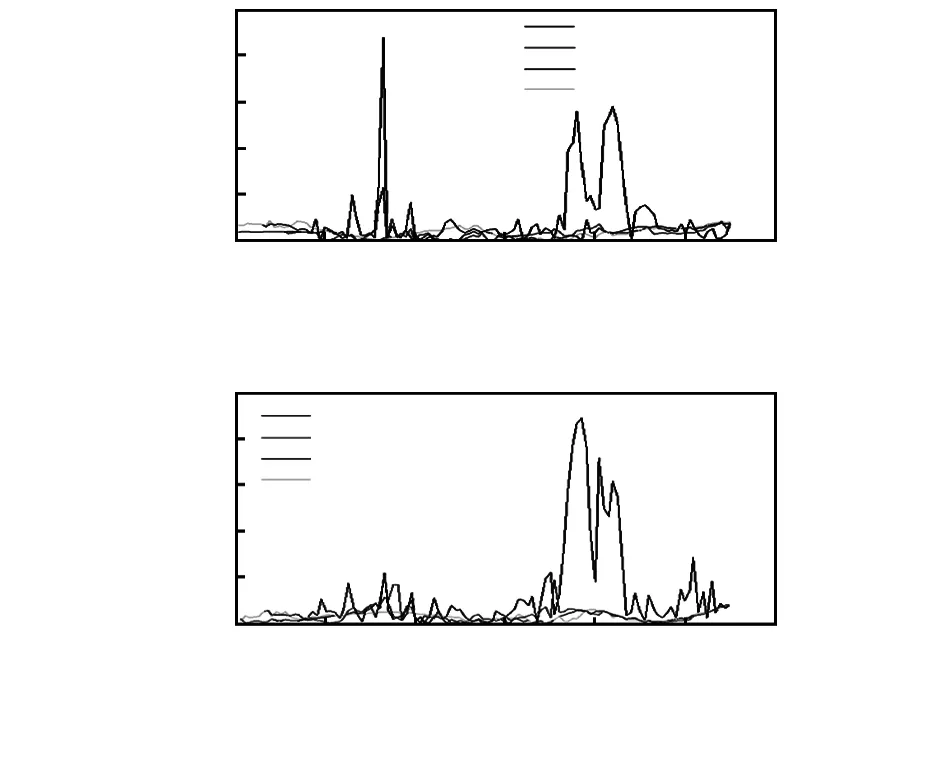
图2 位置均方差Fig 2 Mean square error of position
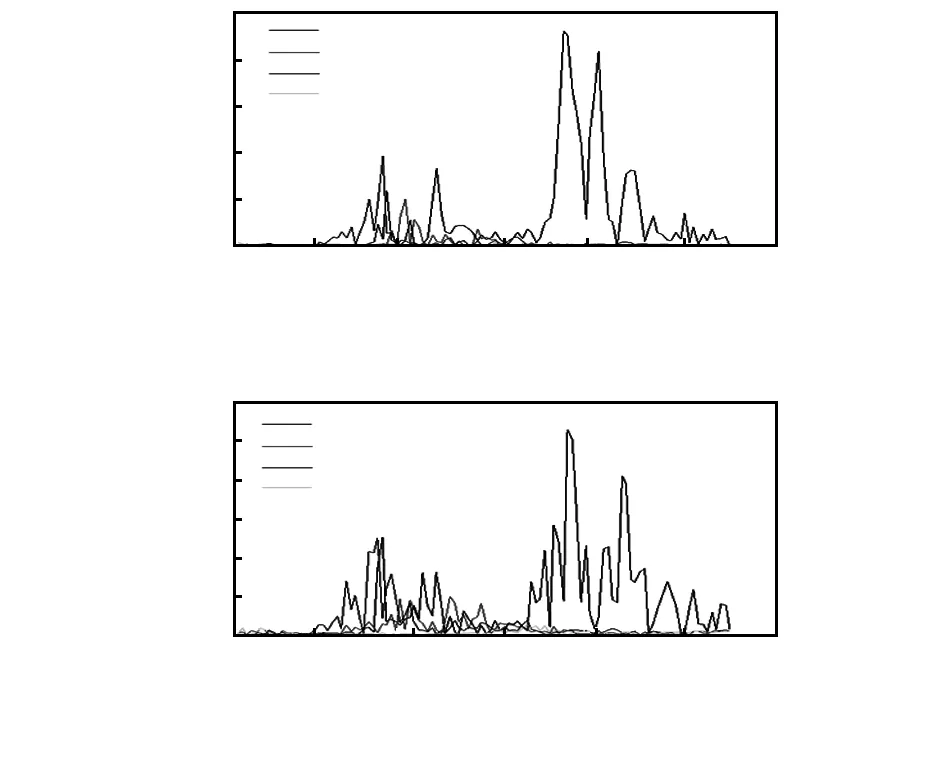
图3 速度均方差Fig 3 Mean square error of velocity
从图2可以看出,在30~35s目标做顺时针110°的转弯运动时,新算法的位置RMSE要明显小于其它三种算法。在65~70s目标做逆时针110°的转弯运动时,四种算法的X轴的位置RMSE都不大,且新算法的位置RMSE要小于其它三种算法;新算法在Y轴的位置RMSE要明显小于其它三种算法。从图3可以看出,在目标机动时,新算法在X轴与Y轴的速度RMSE要小于其它三种算法。而且在整个跟踪过程中,新算法的位置、速度误差均值要明显小于IMM-CIF与IMM-CKF算法;相对于GMIMM-CKF算法,新算法的位置误差均值明显更小,两种算法的速度误差均值都比较小,且相差不大。
通过以上的分析,证明了GMIMM-CIF算法能够明显提高机动目标的跟踪精度,而且在整个跟踪过程中,位置与速度均方根误差都很小,能够对机动目标进行稳定跟踪。
4 结 论
本文提出了GMIMM-CIF算法来提高机动目标的跟踪精度和响应速度。这个算法在GMIMM的基础上引入了CIF,通过马尔可夫链同时处理所有的模型。且CIF算法通过估计信息向量和信息矩阵而不是估计状态向量和协方差,系统的非线性误差明显减小。仿真结果表明:该算法优于GMIMM-CKF,IMM-CIF和IMM-CKF,能有效地提高多模型估计的性能,对机动目标进行稳定跟踪。
[1] 陆新东,胡振涛,刘先省,等.基于IMM多传感器顺序粒子滤波跟踪机动目标算法[J].传感器与微系统,2012,31(4):130-132,136.
[2] Arasaratnam I,Haykin S,Hurd T R.Cubature Kalman filtering for continuous discrete systems:Theory and simulations[J].2010 IEEE Transactions on Signal Processing,2010,58(10):4977-4993.
[3] 魏喜庆,宋申民.基于容积卡尔曼滤波的卫星姿态估计[J].宇航学报,2013(2):193-200.
[4] 张 园,董受全,钟志通,等.防发散无迹卡尔曼滤波自适应网格交互式多模型算法[J].火力与指挥控制,2015(2):40-44.
[5] Yuan G,Zhu W,Wang W,et al.Maneuvering target tracking algorithm based on interacting multiple models[J].Mathematical Problems in Engineering,2015,2015:1-7.
[6] Pakki K,Chandra B,Gu D W,et al.Cubature information filter and its applications[C]∥2011 American Control Conference(ACC),IEEE,2011:3609-3614.
[7] Ge Q,Xu D,Wen C.Cubature information filters with correlated noises and their applications in decentralized fusion[J].Signal Processing,2014,94:434-444.
[8] Laneuville D,Bar-Shalom Y.Maneuvering target tracking:A Gaussian mixture-based IMM estimator[C]∥2012 IEEE Aero-space Conference,IEEE,2012:1-12.
Gaussian mixture interacting multiple model algorithm based on cubature information filtering
XIE Hui-lai1, LIU Yi-an1, WANG Gang2, PENG Su3
(1.School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China;2.China Ship Research and Development Academy,Beijing 100192,China;3.School of Information Engineering,Wuhan University of Technology,Wuhan 430063,China)
Aiming at problem that increasing linear error and obvious decreasing in tracking precision and even diverging because of nonlinear strength increases when target maneuvers in the maneuvering target tracking system,a Gaussian mixture interacting multiple model algorithm based on cubature information filtering(GMIMM-CIF) is proposed to improve the tracking precision.The new algorithm utilizes a Gaussian mixture to replace the exponential number of hypotheses that arises in the optimal multiple model filtering at each step in each mode,thus maintaining a limited number of hypotheses;utilizes cubature information filtering to replace traditional nonlinear filtering,the cubature information filter(CIF) evaluates information state vector and information matrix rather than state vector and covariance, which can reduce the nonlinear error of system.Through simulation comparison experiment,verify that the proposed algorithm can improve tracking precision of maneuvering target.
maneuvering target tracking; Gaussian mixture; interacting multiple model(IMM); cubature information filtering(CIF)
2015—11—02
10.13873/J.1000—9787(2016)10—0138—03
TP 301.6
B
1000—9787(2016)10—0138—03
谢会来(1989-),男,江西赣州市人,硕士研究生,主要研究方向为雷达航迹处理。
猜你喜欢
小学生学习指导(高年级)(2022年4期)2022-04-26
装备制造技术(2020年3期)2020-12-25
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
读写算·高年级(2017年6期)2017-06-27
系统工程与电子技术(2016年2期)2016-04-16
癌症进展(2016年10期)2016-03-20
电影故事(2015年16期)2015-07-14
