
基于图像传感器的上下文快速压缩感知算法*
2016-11-15 06:33:34茅正冲唐雨玉
传感器与微系统 2016年10期
茅正冲, 唐雨玉, 韩 毅
(江南大学 轻工过程先进控制教育部重点实验室,江苏 无锡 214122)
基于图像传感器的上下文快速压缩感知算法*
茅正冲, 唐雨玉, 韩 毅
(江南大学 轻工过程先进控制教育部重点实验室,江苏 无锡 214122)
针对快速压缩感知算法在目标被遮挡、光照变化较大时存在跟踪不稳定的问题,提出了基于图像传感器的上下文快速压缩感知跟踪(FCT)算法。新算法首先在Haar-like特征中引入时空上下文特征,通过目标周围的空间信息和时间上的递推关系协助估计目标的位置。通过改进的随机测量矩阵同时提取目标的纹理特征和灰度特征,加强了特征的稳定性,提高跟踪的准确性。通过方差分类器预判定候选样本,减少判定的次数,并减少错误的候选样本。改进的FCT算法对光照、旋转、尺度缩放都有良好的不变性,且不易发生跟踪漂移。实验证明:改进的FCT算法优于压缩感知跟踪(CT)算法和FCT算法。
快速压缩跟踪算法; 压缩感知; 随机测量矩阵; 方差分类器; 朴素贝叶斯分类器
0 引 言
运动目标跟踪是机器视觉、模式识别等领域的一个重要课题,应用领域广泛[1]。运动目标跟踪是指在连续的视频图像序列中能够实时跟踪到运动的物体[2]。压缩感知跟踪[3](compressive tracking,CT) 算法指出,只要信号满足一定的稀疏性,就能通过少量的数据实现信号的无失真重建[4]。在CT算法的基础上,Zhang K提出了一种与数据无关的基于多尺度图像特征提取的外观模型算法,即快速压缩感知跟踪(fast compressive tracking, FCT)算法,FCT算法具有更好的鲁棒性、高效性[5]。
本文对FCT算法提出改进,首先引入时空上下文特征来协助估计目标的位置,实现更准确地跟踪;再对随机测量矩阵进行改进,改进后的随机测量矩阵提取的目标特征都有较高的稳定性。最后在贝叶斯分类器中引入方差分类器,通过预判定阈值预处理候选样本,可以减少分类器的判定次数,也能减少错误的候选样本,提高运行速度。
1 改进的FCT算法分析
FCT算法,在选取图像块时采用由粗到细的搜索策略降低算法的计算复杂度[6],同时提高了算法稳定性。改进的FCT算法分别从提取Haar-like特征、设计随机测量矩阵、朴素贝叶斯分类器的构建与更新进行改进。
1.1 Haar-like与时空上下文特征
FCT算法提取图像的Haar-like特征, Haar特征模板只有白色和黑色两种矩形,每个Haar特征值为白色矩形像素的总和减去黑色矩形像素的总和。
Haar-like特征表达式为
(1)
式中 w为矩形ri的权,N为构成特征的矩形数目,RectSum(ri)为矩形ri围成的图像的灰度积分。
Haar特征能够在图像的任何位置,所以Haar特征可达到106,计算量非常大。Haar-like特征反映了图像灰度值的变化,具有更好的抗噪声能力,使用积分图像能够提高计算速度,满足实时性的要求。但当目标被遮挡或消失时,会出现跟踪漂移甚至目标丢失的情况,所以,本文引入时空上下文特征来协助估计目标的位置。
视频序列中的运动目标通常都处在相对稳定的时间和空间上下文环境中,目标在不同时刻的状态以及目标与其空间环境中的其他物体都存在紧密的联系,因此,可以利用目标的时空上下文信息来协助估计目标在下一帧中的位置。时空上下文特征分为目标周围的空间信息和时间上的递推关系。其中,时间上下文信息主要是目标运动的速度、加速度和目标的运动轨迹;空间上下文信息主要为目标周围的局部子区域及与目标相关的其他邻近物体[7]。
目标的上下文特征主要通过图像的灰度和位置信息来表示,表达式为
Xc={c(z)=(I(z),z)|z∈Ωc(x*)}
(2)
式中x*为已确定的目标位置,即跟踪到的目标中心位置的坐标;I(z)为图像在位置Z处的灰度值,描述整个上下文Z的外观;Ωx(x*)为位置x*的领域,表示上下文区域,包括目标区域以及目标周围与运动相关的区域[8]。
改进后的特征表达式为
feature=a×HLi+(1-a)×Xc
(3)
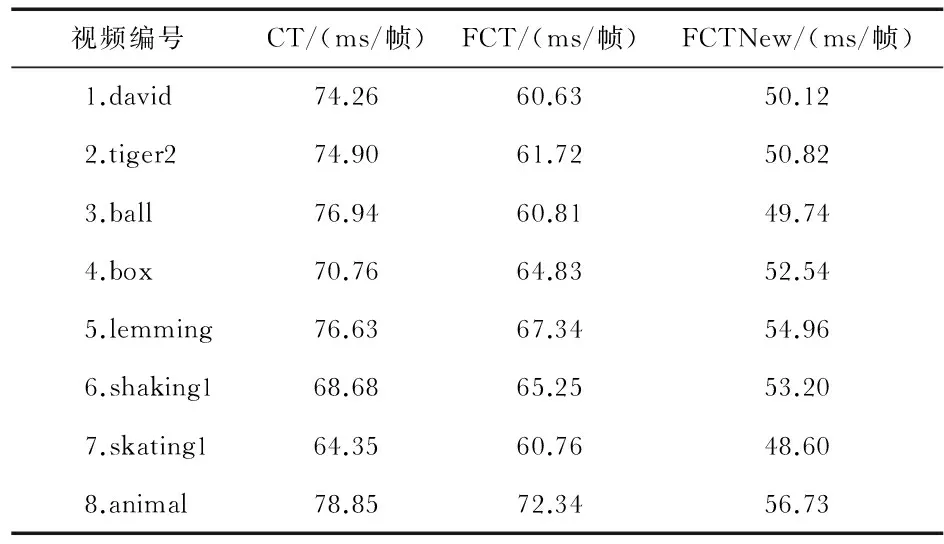
式中 0 1.2 随机测量矩阵及其改进 FCT算法采用一个满足RIP条件的随机测量矩阵将高维信号投影到低维空间中,经过测量矩阵R转换后的低维特征V仍然可以最大概率地保留原始高维特征X的特性。所以,只要存储R中的非零项,计算量很小,稀疏矩阵R元素定义为 (4) 这里,ρ=o(m)=m/(algm)=m/(10a)=m/(6a),rij~N(0,1),a为常数,m为106~1010。 在式(4)中,rij的产生是随机的,所以,fij存在三种情况:只有1;只有-1;同时存在1和-1。当都为1或都为-1时,特征表现为灰度特征,当1和-1同时存在时,特征表现为纹理特征[9]。在运动目标的纹理变化时或者是目标所处的周围环境变化时,目标的纹理特征表现稳定,但当目标产生运动时,目标的灰度特征表现稳定。 为进一步加强目标跟踪的鲁棒性,对式(4)进行改进 (5) 改进后的测量矩阵,可同时提取运动目标的纹理和灰度特征,且两种特征各占1/2,所以,提取的目标特征有较高的稳定性,跟踪效果良好。 1.3 朴素贝叶斯分类器和方差分类器 FCT算法采用贝叶斯分类器确定目标位置,假设V中的每个元素都是独立分布的,即 (6) (7) (8) Dγc={Z|‖I(Z)-It-1‖<γc} (9) (10) Dα={Z|‖I(Z)-It‖<α} (11) Dζ,β={Z|ζ<‖I(Z)-It‖<β} (12) 对于多尺度图像跟踪时,采用式(13)每5帧更新跟踪位置和尺度 (13) 式中It(Z)为跟踪位置,S为尺度,Vs(Z)为特征向量,Γ为低维特征。 (14) (15) 提取出图像特征后,通过分类器来选取候选样本,计算量较大,影响算法的实时性。所以,本文引入方差分类器对候选样本作预判定[10],先根据式(16)计算目标区域的灰度值方差 D(x)=E(x2)-E2(x) (16) 式中x为候选目标,E(x)为目标区域的灰度值均值,E(x2)为目标区域灰度值平方之后的均值,D(x)则为目标的灰度值方差。当候选样本的灰度值方差小于D(x)的1/2时,则为目标样本的几率很小,予以去除[11],即 (17) 式中D′(x)为候选样本的灰度值均值,D(x)则为目标的灰度值方差。通过对候选样本的预处理,减少分类器的判定次数,减少了运算量,同时减少了错误的候选样本,提高算法的稳定性。 1)在图像传感器采集视频序列后:手动选取跟踪目标;根据式(9)~式(12)训练正负样本;利用式(5)生成训练样本的特征;初始化分类器参数。 2)读取新一帧图像,粗略地一些采集图像块,选取候选目标1,通过式(3)计算特征,选取H(V)最大的位置1。 3)再精细地采集图像块,挑选出满足式(17)的候选目标区域2,计算区域2内目标的特征,并选择H(V)最大的位置为新一帧的目标位置。 4)得到目标的位置后,根据式(14)、式(15)更新分类器;多尺度图像跟踪时,根据式(13)每5帧更新跟踪位置和尺度。 5) 跳转至步骤(2)处进行下一帧的处理。 实验平台为PC,内存为4.00 GB,操作系统是Windows 7,程序编写采用Matlab2013a。为了对比三种算法,采用8个原作者论文中的视频进行测试,具有代表性。运算结果如表1所示。 表1 三种算法跟踪时间 从表1可以看出,FCTNew算法的运算速度快于CT算法和FCT算法。选取具有代表性David和Tiger2进行分析,跟踪效果图如下。其中,点线框为CT算法,虚线框为FCT算法,实线框为FCTNew算法。 图1 David视频序列Fig 1 David video sequence 在David视频序列中,从图1(a),(b)和(c)可以看出:光照发生变化时FCTNew算法跟踪最为准确。在图1(d),(e)中,当目标发生旋转并且尺度变化时, FCTNew算法的跟踪偏移量最小。在图1(f)和(h)中,CT算法出现明显的跟踪漂移,而FCTNew算法仍能实现准确跟踪。可得出结论,与CT算法和FCT算法相比,FCTNew算法对光照、旋转、尺度缩放有较强的鲁棒性,且能有效解决跟踪漂移的问题。 从图2中可看出:目标被完全遮挡时,FCTNew算法跟踪效果最好,且在后续视频帧中目标也没有丢失。 图2 Tiger2视频序列Fig 2 Tiger2 video sequence 图3和图4中右上角的数据为所有点的中心位置误差的均值,均值越小说明平均误差越小,算法的准确性越高。从误差曲线图可看出:FCTNew算法最好,FCT算法次之,CT算法最差。 图3 David视频序列的跟踪误差曲线图Fig 3 Tracking error curve of David video sequence 图4 Tiger2视频序列跟踪误差曲线图Fig 4 Tracking error curve of Tiger2 video sequence 综上,改进的FCT算法优于CT和FCT算法,能更好地应用于实际。 新算法引入了时空上下文特征;对原来的随机测量矩阵进行了改进;最后引入方差分类器对候选样本进行预判定。通过仿真实验可证明,改进的FCT算法在时效性和准确性上,都优于CT算法和FCT算法。 [1] Yilmaz A,Javed O,Shah M.Object tracking:A survey [J].ACM Computing Surveys,2006,38(4):1-45. [2] Yang G,Liu H.Survey of visual tracking algorithms [J].CAAI Transactions on Intelligent Systems,2010,5(2):95-105. [3] Zhang Kaihua,Zhang Lei,Yang Ming-Hsuan.Real-time compressive tracking[C]∥Computer Vision-ECCV,2012:866-879. [4] Donoho D L.Compressed sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306. [5] Zhang Kaihua,Zhang Lei,Yang Ming-Hsuan.Fast compressive tracking[J].Pattern Analysis and Machine Intelligence,2014,36(10):2002-2015. [6] Babenko B,Yang Ming-Hsuan,Belongie S.Robust object tracking with online multiple instance learning[J].Pattern Analysis and Machine Intelligence,2011,33(8):1619-1632. [7] Dinh T B,Vo N,Medioni G.Context tracker:Exploring supporters and distracters in unconstrained environments[C]∥2011 IEEE Conference on Computer Vision and Pattern Recognition(CVPR),IEEE,2011:1177-1184. [8] Zhang K,Zhang L,Yang M,et al.Fast tracking via spatio-temporal context learning[J].Computer Vision and Pattern Recognition,2013,1939(1311):127-141. [9] Xie Yuan,Zhang Wensheng,Qu Yanyun.Discriminative subspace learning with sparse representation view-based model for robust visual tracking[J].Pattern Recognition,2014,47(3):1383-1394. [10] Kalal Z,Mikolajcayk K,Matas J.Tracking-learning-detection[J].Pattern Analysis and Machine Intelligence,2012,34(7):1409-1423. [11] Xie Chengjun,Tan Jieqing,Chen Peng.Collaborative object tra-cking model with local sparse representation[J].J Vis Commun Image R,2014,25(2):423-434. Fasting compressive sensing algorithm with context based on image sensor* MAO Zheng-chong, TANG Yu-yu, HAN Yi (Key Laboratory of Advanced Process Control for Light Industry,Ministry of Education,Jiangnan University,Wuxi 214122,China) Aiming at problems that fast compressive tracking(FCT),algorithm has poor robustness in target occlusion and illumination changes,propose a FCT algorithm with context based on image sensors.First,the new algorithm introduces temporal and spatial context features in the Haar-like feature,and assists to estimate target position by spatial information around target and time recurrence relation.By improved random measurement matrix,extract simultaneously texture features and gray features of target,stability of feature is enhanced,accuracy of target tracking is improved.Pre-judge candidate sample by variance classifier,reduce number of decision,reduce number of wrong candidate samples.The improved FCT algorithm has good invariance for illumination,rotation and scale changes,tracking drift also not easy to happen.It can be proved that the improved FCT algorithm is superior to CT and FCT algorithms. fast compressive tracking(FCT) algorithm; compressive sensing(CS); random measurement matrix; variance classifier; naive Bayes classifier 2016—01—06 国家自然科学基金资助项目(60973095); 江苏省自然科学基金资助项目(BK20131107) 10.13873/J.1000—9787(2016)10—0131—04 TP 391 A 1000—9787(2016)10—0131—04 茅正冲(1964-),男,江苏启东人,硕士,副教授,主要从事机器人视听觉识别的研究工作。



2 改进的FCT算法步骤
3 实验结果与分析




4 结 论
猜你喜欢
中学生数理化·七年级数学人教版(2023年6期)2023-05-25 12:17:42
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09 06:09:10
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:32
电子测试(2018年1期)2018-04-18 11:52:35
初中生世界·九年级(2017年10期)2017-11-08 21:30:36
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
