
外骨骼机器人的人体步态感知系统设计*
2016-11-15 06:12周攀,杨勇,马磊,舒杨
传感器与微系统 2016年10期
周 攀, 杨 勇, 马 磊, 舒 杨
(1.西南交通大学 电气工程学院,四川 成都 610031;2.中国工程物理研究院 总体工程研究所,四川 绵阳 621900)
外骨骼机器人的人体步态感知系统设计*
周 攀1, 杨 勇1, 马 磊1, 舒 杨2
(1.西南交通大学 电气工程学院,四川 成都 610031;2.中国工程物理研究院 总体工程研究所,四川 绵阳 621900)
针对下肢负重外骨骼机器人与其穿戴者运动协调的问题,设计一种人体步态感知系统,对人体下肢关键部位的运动状态采集和预测。用6个MTI—30姿态传感器采集人体下肢的姿态数据;以ARM微处理器STM32F407为计算单元,对采集的步态数据解算、预测和传输;用非线性时间序列分析Takens算法预测人体下肢关键部位的旋转运动。实验结果表明:该系统功能稳定,能准确对人体下肢的步态数据采集和预测,预测结果稳定可靠,为外骨骼控制器提供可靠的参考信息。
外骨骼; 姿态传感器; 步态感知; Takens算法; ARM
0 引 言
下肢负重外骨骼是一种可穿戴机器人,通过为人体提供外力支持,达到降低人体的负荷、提高人体持久运动能力的目的,在提高单兵作战能力、专配维修作业及医疗助残方面有广泛的应用前景[1~5]。
下肢负重外骨骼工作机理为感知系统实时捕获人体步行状态,控制器产生控制信号驱动机械骨骼跟随人体运动。从感知系统捕获人体步态到输出控制信号,以及驱动机构(通常为电机或液压)驱动外骨骼关节到达目标轨迹均需要一定的时间,而此过程人体已经运动到另一状态,因此,机械外骨骼步态滞后于穿戴者步态,从而干扰穿戴者的行走行为。为解决此问题,其控制系统的参考信号应当超前于人体的运动状态,需要对人体运动步态进行实时、准确的捕获和预测。
针对上述问题,本文设计一种步态感知系统,系统使用6只姿态传感器MTI—30采集人体下肢步态数据,用ARM微控器对步态数据进行在线预测,为外骨骼控制器提供可靠的参考信息。
1 系统总体结构
人体下肢运动信息复杂多变,步态感知系统是实现人机信息交互,实时控制的硬件基础,其总体结构如图1所示。步态感知系统由6只姿态传感器(左右腿分别使用3只传感器)和1个数据处理主板组成,主要包括两个功能:下肢关节角度感知和下肢关节旋转角度预测。
传感器的配戴方式如图2所示,人体下肢的圆点表示姿态传感器,在人的大腿、小腿和脚掌上按同样的方式分别配戴一个姿态传感器,可通过两个相邻传感器的数据进行简单的代数运算得出膝关节、踝关节的角度信息。

图2 传感器配戴方式Fig 2 Diagram of sensor allocation mode
2 硬件设计
2.1 传感器
系统的传感器采用的是XSENS公司的MTI—30姿态传感器,该传感器包含三轴加速度计、三轴陀螺仪和三轴电子罗盘,内嵌低功耗的ARM处理器,各轴角度输出通过其自带的卡尔曼滤波器最优估计得出,静态及动态导向误差分别为0.2°,0.5°,姿态解算速率最高可达500 Hz,本文的步态感知系统将解算速率配置为100 Hz,即每10 ms向主板传输一次采样数据。传感器信号输出采用的是RS—232协议,为了能够和主板上ARM微控器通信,需要电平转换,将RS-232协议的电平转换为TTL电平。如图3所示,电平转换采用芯片MAX3387,该芯片有3个电平转换通道。
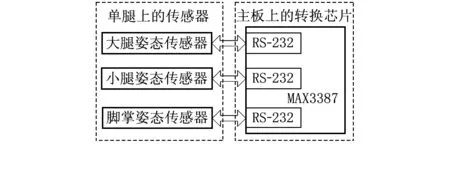
图3 传感器接口硬件框图Fig 3 Hardware block diagram of sensor interface
2.2 数据处理主板
系统的主板由2个电平转换芯片、3个微控器、一个无线模块构成,其硬件框图如图4所示。电平转换芯片选择的是MAX3387,作为微控器和姿态传感器之间通讯的中转站,负责TTL电平和RS—232电平之间的转换。微控器采用的是ARM内核的STM32F407单片机,该单片机集成了UART,SPI等通信模块,能够简化硬件和软件设计,主频可达168 MHz,内嵌浮点运算单元(FPU),可以快速处理浮点运算,图中1#,2#微控器分别处理左脚、右脚的传感器数据,并通过SPI模块发送给1#微控器。由于两只脚的传感器数据分别在不同的微控器上并行计算,因此,需要将两只脚的数据同步整合,1#微控器主要作用是对另外两个微控器的数据进行整合,实现时间同步并通过无线模块发送到外骨骼控制器或者上位机。无线模块采用的是XBee-PR 900HP,其传输速度可达250 kbps,在城市的通信距离长达100 m。

图4 数据处理主板硬件框图Fig 4 Hardware block diagram of data processing mainboard
3 软件设计
3.1 传感器数据接收软件设计
MTI—30姿态传感器的数据是按照特定格式的数据帧封装的,因此,需要设计软件来解算数据帧。如图5所示,系统通过中断来实现数据解算,STM32单片机的UART模块每接收1个字节的数据就促发一次中断,因此,传感器的一帧数据需要促发多次中断才能解算完毕。

图5 数据帧解算流程Fig 5 Resolving flow chart of data frame
3.2 主程序软件设计
左、右脚传感器数据处理流程如图6(a)所示,当程序检测到3只传感器的采样数据都已接收成功,计算出膝盖、脚踝的夹角数据,通过非线性时间序列分析Takens算法可以对关节的旋转角度进行预测,将预测量及其他数据通过SPI模块发送给1#微控器,该算法将在下一节进行介绍。数据转发也按照MTI—30的帧格式封装,因此,1#微控器解算数据帧的方式和解算传感器数据帧是一样的,如图5所示,其主程序流程图如图6所示。
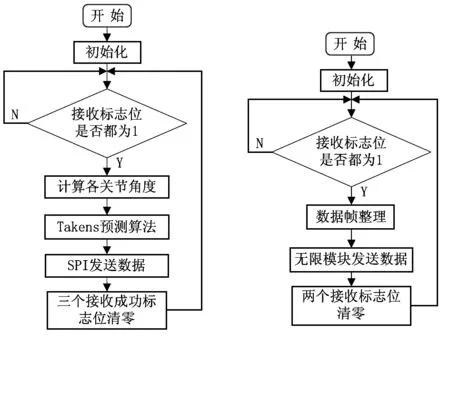
图6 主程序流程图Fig 6 Flow chart of main program
3.3 步态预测Takens算法
20世纪80年代,Packard等人提出了由非线性时间序列来重构奇异吸引子相空间的思想方法[6],并研究其非线性动力学特性。于此同时,Takens独立地提出用延时坐标法和标量时间序列来重构奇异吸引子相空间[7],奠定了非线性时间序列分析的基础。对非线性时间序列动力学因素的分析,目前广泛采用的是延迟坐标相空间重构方法[8]。
根据Takens嵌入定理,对于给定时间序列y(t)∈R,0≤t≤n,给定适当的延迟时间h和嵌入维数p,则可得延迟矢量[9]
D(t)=[y(t),y(t-h),…,y(t-h(p-1))]T
(1)
以相空间重构及Takens嵌入定理为理论基础与数学工具,本文所实现的数据预测算法流程如下[10]:
1)在每个采样时刻t,t≥hp得到一个延迟矢量D(t);
2)计算当前时刻D(t)与之前观测到的所有D(i),hp≤i≤t之间的欧氏距离δ(i)=‖D(t)-D(i)‖;


(2)


(3)
预测阶数k主要由外骨骼系统执行机构响应速度决定,微控器中的预测阶数k应当可以通过程序设置,以适应不同的驱动机构。由于课题研究的下肢负重外骨骼是面向能够正常行走的成年人,因此,针对身高1.70 m的成年男性在3.6 km/h的正常步行速度下进行实验,使用动作捕捉系统OptiTrack得到的下肢各关节运动角度信息,数据的采样率为100 Hz,对数据按照上述的方式进行仿真,统计出不同预测阶数下的重构参数,如表1所示,k取{3,5,7,9}表示预测采样点未来{30,50,70,90}ms的数据,最后一列为仿真时的最高预测准确率。

表1 Takens算法重构参数表
4 实验结果
实验中,选择不同身高的男性实验者共20名,不同身高的女性实验者20名。为了验证步态感知系统采集步态数据的准确率,在实验时,使用步态感知系统和动作捕捉系统OptiTrack同时采集人体下肢各关节的夹角数据。参考式(1),感知系统相对于动作捕捉系统OptiTrack的准确率用PR(e,yo)表示,其中e(t)=yo(t)-y(t),yo(t)表示t时刻OptiTrack的夹角数据,y(t)表示t时刻步态感知系统的夹角数据。实验统计出步态感知系统数据准确率PR(e,yo)均值和预测准确率PR(ek,y)均值如表2所示。
由表2第三列可以看出,步态感知系统和动作捕捉系统OptiTrack的数据非常接近,说明步态感知系统能够准确测量人体下肢的步态数据。由第四列可以看出,预测准确率随着k的增大基本保持不变,有很好的稳定性和准确度。
5 结束语
利用姿态传感器、ARM微控器及无线通信模块设计了人体步态感知系统,该系统利用安装在外骨骼穿戴者下肢的姿态传感器采集人体下肢关节的旋转运动,并通过非线性时间序列分析Takens算法预测人体下肢关节未来一段时间的运动情况。实验结果表明:设计的步态感知系统性能稳定,能够准确、稳定地采集和预测人体下肢的步态数据,为外骨骼控制器提供可靠的参考信息,解决了外骨骼与穿戴者运动不协调的问题,同时解决了外骨骼步态滞后于穿戴者步态的问题。
[1] 赵彦峻,徐 诚.人体下肢外骨骼设计与仿真分析[J].系统仿真学报,2008,20(17):4756-4766.
[2] Ferris D,Lewis C.Robotic lower limb exoskeletons using proportional myoelectric control[C]∥The 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society,Mineapolis,Minnesota,USA:IEEE Engineering in Medicine and Biology Society,2009:2119-2124.
[3] Wehner M,Rempel D,Kazerooni H.Lower extremity exoskeleton reduces back forces in lifting[C]∥ASME Dynamic Systems and Control Conference,Hollywood,California,USA:Dynamic Systems and Control Division,2009:49-56.
[4] Garcia E,Sater J M,Main J.Exoskeletons for human performance augmentation (EHPA):A program summary[J].Journal of the Robotics Society of Japan,2002,20(8):44-48.
[5] 周小华,李 娟,李伟达,等.一种基于多传感器的步态相位实时检测系统[J].传感器与微系统,2016,35(2):91-96.
[6] Packard N H,Crutchfield J P,Farmers J D. Geometry from a time series[J].Physical Review Letters,1980,45(9):712-716.
[7] Takens F.Detecting strange attractors in fluid turbulence[J].Dynamical Systems and Turbulence,1981,898:366-381.
[8] 孟庆芳,彭玉华.混沌时间序列改进的加权一阶局域预测法[J].计算机工程与应用, 2007,43(35):61-64.
[9] 李正周,丁 浩,刘 梅,等.实测海杂波光电图像混沌特性研究[J].传感器与微系统,2013,32(4):27-33.
[10] Herrmann C.Robotic motion compensation for applications in radiation oncology[D].Bavaria:University of Wuerzburg,2013:131-152.
Design of human gait sensing system based on exoskeleton robot*
ZHOU Pan1, YANG Yong1, MA Lei1, SHU Yang2
(1.School of Electrical Engineering,Southwest Jiaotong University,Chengdu 610031,China;2.Institute of Systems Engineering,China Academy of Engineering Physics,Mianyang 621900,China)
Aimed at problem of movement coordinating of exoskeleton with its wearer,a human gait sensing system is designed for aquistition and prediction of lower limbs’ motion state of the wearer.The system uses six attitude sensors called MTI—30 to acquire human gait data.ARM microcontrollers known as STM32F407 are used as data computing units in the system.Acquired gait data are resolved,predicted and transmitted.Predict rotational motion of human legs by nonlinear time series analysis Takens algorithm.The result of experiments show that system has stable function and can accurately acquire and predict human gait data of human legs,the predicted result is stable and reliable,which provides reliable reference data for exoskeleton controller.
exoskeleton; attitude sensor; gait sensing; Takens algorithm; ARM
2016—02—23
国家自然科学基金重点资助项目 (61433011); 国家自然科学基金资助项目(61075104)
10.13873/J.1000—9787(2016)10—0082—04
TP 274
A
1000—9787(2016)10—0082—04
周 攀(1989-),男,四川雅安人,硕士研究生,研究方向为检测技术与自动化装置。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年4期)2022-10-08
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
中华骨与关节外科杂志(2016年3期)2016-05-17
工业设计(2016年6期)2016-04-17
电测与仪表(2016年22期)2016-04-12
电子工业专用设备(2015年4期)2015-05-26
