
基于PKS系统锅炉温度控制的研究
2016-11-12 05:44赵波张宝
自动化博览 2016年3期
赵波,张宝,2
(1. 河南理工大学,河南 焦作 454174)
(2. 中铝中州铝业有限公司,河南 焦作 454174)
基于PKS系统锅炉温度控制的研究
赵波1,张宝1,2
(1. 河南理工大学,河南 焦作 454174)
(2. 中铝中州铝业有限公司,河南 焦作 454174)
1 引言
锅炉出口温度的稳定控制十分重要,太高浪费燃料,太低则不能达到工艺的要求。本文针对锅炉的温度进行了研究,运用串级控制方式,以锅炉为被控对象,以锅炉出口水温为主被控参数,以炉膛内水温为副被控参数,首先进行了理论的研究,利用仿真软件对串级回路各参数的变化对锅炉温度的影响进行了仿真研究。在生产实践中,利用霍尼韦尔PKS DCS为控制器,构成锅炉温度串级控制系统;采用PID算法,运用DCS功能块图编程语言进行编程,实现锅炉温度的自动控制。
2 锅炉温度串级PID控制研究
(1)锅炉温度控制现状
现有锅炉温度共有三个测点,测点1和2分别安装在蒸汽管道的中间位置,距离比较近,测点3安装在蒸汽管道的出口位置,通过现场的热电偶元件(K型号)传给温度变送器,再通过温度变送器传到DCS系统,进而对蒸汽温度进行测量。三个温度测量点量程都是0℃~800℃,正常工作下,温度不会低于515℃或者高于545℃,所以正常运行时汽包温度应在正常温度15℃上下范围波动。
(2)串级调节回路特点分析
主蒸汽温度调节的主要困难在于引起蒸汽温度变化的扰动因素很多,不容易控制。如蒸汽流量、火焰中心位置、燃烧工况、烟汽温度和流速、炉膛受热面结焦和过热器积灰的变化等,都会使主蒸汽温度发生变化。其中起主要作用的是蒸汽流量和减温水流量两个方面。由于被控对象(过热器通道)具有较大的延迟和惯性以及运行中要求有较小的温度控制偏差,所以采用单回路调节系统往往不能获得较好的调节品质。针对主汽温调节对象调节通道惯性延迟大、被调量信号反馈慢的特点,应该从对象的调节通道中选择一个比被调量反应快的中间点信号作为调节的补充反馈信号,以改善调节通道的动态特性,提高调节系统的控制品质。
(3)主蒸汽温度调节系统的组成及原理
图1为主蒸汽温度调节原理图,正常运行时,主要是通过两级减温器来调节主蒸汽温度。第一级喷水减温器设在分隔屏出口,用以保护后屏不超温,作为过热器温的粗调;第二级喷水减温器设在后屏出口,作为细调,一级和二级喷水减温控制系统均系串级控制系统。一级喷水减温控制系统调节的主参数为后屏出口温度,副参数为一级减温器出口温度(作为前馈信号)。二级喷水减温控制系统的被控对象为末过出口温度,副参数为二级减温器出口温度(作为前馈信号)。由于两级减温器调门的开度与正参数不是成比例关系,因此正常运行时应保持减温器具有一定的开度。

图1 主蒸汽温度调节原理图
3 锅炉温度串级PID控制系统设计
由图2可以看出,此串级控制回路是用两个串联的PID控制器和一个执行器来控制主汽温度。其基本原理就是系统根据主蒸汽温度设定值和反馈值y1的偏差e,作为主调节器的输入,主调节器经过PID运算后的输出u,作为副调节器的输入设定值,此设定值与二级喷水减温器的出口温度反馈y2的偏差e2作为二级过热器出口温度调节器的输入,其输出u2作为执行器的输入动作指令。一般在主蒸汽温度调节系统中,副调节回路动态特性的迟延和惯性比较小,在这种情况下,副回路的调节过程快得多,当副回路消除喷水扰动时,主蒸汽温度基本上不受影响。因此,当副回路动作时主回路可以看作是开路,主回路动作时,副回路可以看作是迅速动作的随动系统,即二级减温器出口温度基本上与校正信号e成比例变化。

图2 主蒸汽温度调节系统方框图
4 锅炉温度串级PID控制MATLAB仿真研究
PID Controller 模块的结构图如图3所示。

图3 PID Controller 模块结构图
通过用PID控制器、模糊控制器和模糊PID控制器分别对系统进行控制,可以得到响应曲线如图4所示。

图4 三种控制对比的响应曲线图
黄色为PID控制曲线,绿色为模糊PID控制响应曲线,紫色为模糊控制响应曲线。从图中可以看出基于模糊PID控制器的系统的性能指标为:调节时间Ts=450秒,超调量δ=27%,稳态误差为ess=0,由仿真的曲线很容易看出,采用串级PID的方法来控制锅炉温度,可以使系统超调小、稳定性高,而且调节时间也显著减少了。
当模型参数改变时,假设模型变为GS=1/(1+60S),用上述三种方法对其通过以上对PID控制、串级控制和模糊自整定PID控制三种方案的理论分析和仿真研究,不难得出:用PID方法来控制系统容易产生超调和振荡;而串级控制虽说可以减少控制系统的振荡,却产生了稳态误差,并且稳态误差比较大;最后采用模糊PID的方法来控制系统既克服了单纯采用PID控制及模糊控制的缺点,同时也使系统实现了超调量小、调节时间短、稳态误差小的性能指标。因此本文选用模糊自整定PID串级控制为锅炉温度控制系统的控制方案。
5 锅炉温度串级控制的实现
(1)组态逻辑控制
此主蒸汽温度一共有3个,位号分别为:G7TT0271、G7TT0272、G7TT0273,测点1和2分别安装在蒸汽管道的中间位置,距离比较近,测点3安装在蒸汽管道的出口位置,通过现场的热电偶元件(K型号)传给温度变送器,再通过温度变送器传到DCS系统,进而对蒸汽温度进行测量。从锅炉出来的蒸汽温度经过二级减温,分为1级减温水减温和2级减温水减温,每个减温站又分为南侧和北侧减温装置,通过人工调节1、2级南侧和北侧的减温水调节阀开度来控制减温水流量以达到减温目的,在二级减温装置出来后得到需要的蒸汽温度。G7TV0043代表二级减温水1#调节阀回路,G7TV0044代表二级减温水2#调节阀回路。
两个串级PID回路分为主控制回路和副控制回路。
主控制回路(G7TV0043PID)用三取中的方法对三个水位进行选取,三个温度分别为G7TT0271、G7TT0272、G7TT0273,用signalsela块进行三取中的算法将输出的值作为PV值,然后与主蒸汽温度的设定值进行比较作为副调节器的输入值。主控制回路组态画面如图5所示。
副控制回路G7TV0043Y和G7TV0044Y(如图6所示)、G7TT0251和G7TT0253分别为二级减温水温度值,作为副控制回路的输入值PV,和主回路的输入值(即G7TV0043PID的OP),两者进行比较,然后进行PID调节,最后输出到二级减温水调节阀的给定值,去控制减温水阀的开度大小。
(2)手动回路保护
如果遇到锅炉运行状况不稳定,或者由于工艺变化,导致PID运行性能不好或下降时,可以人工进行手动调节,暂时可以调控生产需要。
由图7调节画面可以看到,左侧为主控制回路的调节画面,右图为副控制回路的调节画面,其MD(即Mode)分别为AUTO和CAS方式,说明是在自动状态,若出现紧急情况,可把MD设置为MAN,即手动模式,根据工艺需要进行温度的调节。

图5 主控制回路组态画面
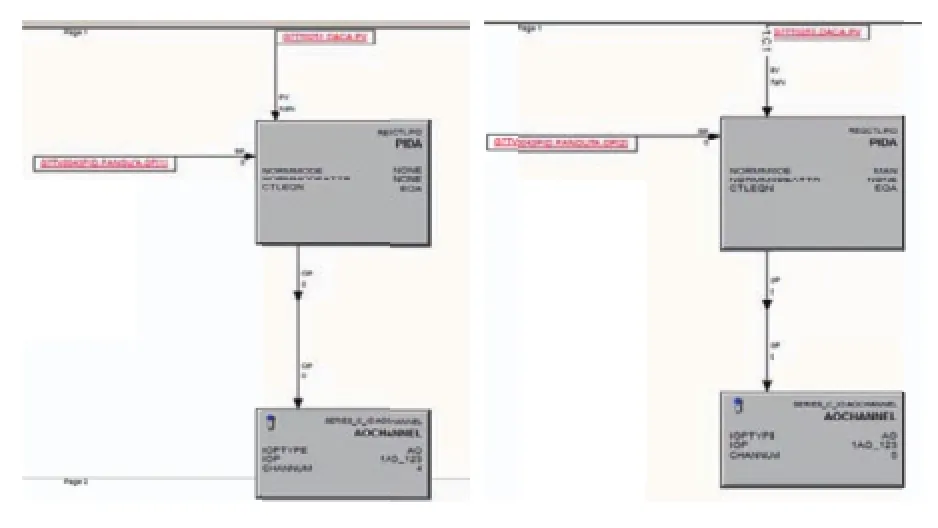
图6 副控制回路之G7TV0043Y和G7TV0044Y

图7 自动调节画面显示
(3)结论
系统设计完成后的调节画面如图8所示:

图8 最终的调节画面
查看温度趋势图如图9所示:

图9 温度趋势画面
串级PlD控制系统主汽温度趋势图的波动可以看出,副调节器起粗调作用,主调节器起细调作用,当减温水流量发生扰动或者副回路受到其它外来的扰动时,通过副调节器的调节作用能尽快消除扰动,减弱对主汽温度的影响。主蒸汽温度在扰动作用下,波动范围在±5℃,完全满足实际工艺要求。
6 结语
前馈控制是将扰动信号经前馈控制器处理后用以消除扰动对被调量的影响,它是按扰动进行的补偿控制,所以前馈控制又叫作“扰动补偿”。由自动控制原理知道,扰动补偿属于开环控制。前馈控制对系统的稳定性无影响,只要原系统是稳定的,施以前馈控制后,系统仍然稳定。只能对于可以测量的扰动作用进行扰动补偿。前馈控制器的结构、参数取决于被控制对象与扰动通道的特性。从本设计系统可知,此系统对各种典型影响因素的干扰均能做出快速反应,具有较高的调节质量和调节精度,能够维持汽包水位的稳定,保障机组的安全稳定运行。
通过此次系统控制系统的设计,可看出PKS系统具有强大的硬件和软件功能,能很好地实现系统的设计要求,采用串级PlD控制对主汽温调节进行改造,串级PID控制系统主、副两个调节回路的工作相对比较独立,系统投运时的整定、调试直观方便。其实际控制效果良好。
[1] 郭晨. 智能控制器与锅炉专家控制系统的研究[D]. 舟山: 浙江海洋学院图书馆, 1997.
[2] 潘新民, 王燕芳. 微型计算机控制技术[M]. 北京: 电子工业出版社, 2011, 1 - 2.
[3] 山西省电力工业局编. 热工仪表及自动装置[M]. 北京: 中国电力出版社, 2004, 8.
[4] 李杰. 工业锅炉给水控制系统的研究[D]. 西安: 长安大学, 2008.
[5] 葛芦生, 陶永华. 新型PID控制及其应用[J]. 工业仪表及自动化装置, 1998 ( 3 ): 1 - 5.
[6] 林德杰. 过程控制仪表及控制系统[M]. 北京: 机械工业出版社, 2008. [7] Kwan H W, Anderson J H. Mathematics model of a 200MW boiler.Int. J. Control. 1970, 12 ( 6 ).
[8] Astrom K J, Ecklund E. A simplified nonlinear model of a drum boilerturbine unit, Int. J. Contr. 1972, 16 ( 1 ): 145 – 169.
[9] performance at Essar Steel[J]. Iron & Steel Engineer, 1998, 75 ( 12 ): 31 - 36.
[10] Honeywell Experion PKS中文培训教程[Z].
Study on Control of Boiler Temperature Based on PKS System
本文采用霍尼韦尔PKS系统进行锅炉温度系统的设计,对于锅炉温度的控制提出了采用串级方式进行调节,通过理论和实际相结合,对串级控制系统的原理进行探讨,通过Matlab仿真软件,研究最优控制的参数,并在PKS系统中通过程序组态和画面显示,达到良好的调控效果,最后验证相关结论。
锅炉温度;PKS系统;串级;Matlab软件
In this paper, the Honeywell PKS system is used to design the temperature system of boil, and the cascade control is proposed to control the boil temperature. By combining theory and practice, the principle of the cascade control is studied. By the Matlab software, the optimal control parameters is studied, and it can therefore achieve the good control affect by using routine configuration and image display in the PKS system. Finally, the related results are demonstrated.
Boiler temperature; PKS system; Cascade; Matlab software
B
1003-0492(2016)03-0082-03
TP273
赵波(1956-),男,博士,教授,博士生导师,现任河南理工大学机械与动力工程学院院长,享受国务院政府特殊津贴,河南省省管优秀专家,省杰出人才创新基金获得者,省跨世纪学术技术带头人,机械工程省一级重点学科带头人,省先进制造技术创新型科研团队带头人,省高校优秀共产党员。
张宝(1984-),男,湖北枣阳人,中级人力资源师,本科,2008年毕业于武汉科技大学人力资源专业,现就职于河南焦作中铝中州铝业有限公司人力资源部。
猜你喜欢
当代水产(2022年4期)2022-06-05
电子乐园·下旬刊(2022年5期)2022-05-13
学校教育研究(2020年13期)2020-07-07
中国特种设备安全(2019年8期)2019-10-14
中国设备工程(2019年18期)2019-01-18
宇航计测技术(2018年3期)2018-09-08
文理导航·科普童话(2017年4期)2018-02-10
中国化肥信息(2017年12期)2017-02-10
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27
