船舶燃机电机混合动力控制方法
2016-11-10 07:51:04陈虹丽王子元赵凯岐
海军航空大学学报 2016年1期
陈虹丽,王子元,赵凯岐
(1.哈尔滨工程大学自动化学院,哈尔滨150001;2.中国电子科技集团第43研究所,合肥230022)
船舶燃机电机混合动力控制方法
陈虹丽1,王子元2,赵凯岐1
(1.哈尔滨工程大学自动化学院,哈尔滨150001;2.中国电子科技集团第43研究所,合肥230022)
在对现有混合动力控制系统进行研究的基础上,提出了新型的燃气轮机和异步电机混合动力系统。采用模块化的设计方法,建立了燃气轮机、异步电机、S.S.S.离合器、并车齿轮箱、并车控制器和螺旋桨等部件的数学模型,进而构建了整个系统的仿真模型。利用外特性法建立了燃气轮机的仿真模型;采用电流滞环跟踪PWM方法建立了异步电机仿真模型,实现了弱磁调速;建立了S.S.S.离合器的可靠的仿真模型,能够研究并车时的冲击;设计了2种推进方式投切策略,实现了混合动力仿真;设计了并车控制器以实现并车过程调节。对混合动力控制策略和并车过程进行了仿真,结果表明所提出的混合动力系统能够正常工作,并车控制器工作较好,并车策略有效,能够减小并车过程中的冲击。
混合动力;控制器;并车
现代船舶动力装置主要有内燃机、蒸汽轮机、燃气轮机、电动机、核动力装置,这些装置各有优缺点。文献[1-6]都提到了联合推进方式,这种方式即为本文研究的混合动力方式。在本文后续介绍中将不再区分混合动力和联合动力2种名称。混合动力系统一般由2种型式的推进装置组成,在低速工况时,只有1个推进设备工作;在高航速或全速工况时,另外1个推进装置工作或2个推进装置共同工作[7]。船舶混合动力推进方式十分适于工况变化较大的情况。目前国内外的研究,比较成熟的是燃气轮机和柴油机的组合,多见于柴柴混合动力、柴燃混合动力、燃燃混合动力等形式。燃机电机(简称燃电)混合动力是一种新型动力形式,由燃气轮机和电动机混合推进。目前,国内外还没有文献研究过这种混合动力推进方式。为获得短时间的最大航速要求的最大功率,采用单机组功率大,单位重量尺寸小的燃气轮机作为加速装置;为方便控制、调速和推进,节省燃料,可以使用异步电动机作为巡航装置。在混合动力装置中,燃气轮机和异步电机各自发挥优势,适用于工况变化大的情况,基本解决了动力装置的单位重量尺寸、续航力、耗油率等问题。
1 混合动力系统结构
本文主要考虑2种推进方式:①正常航行时,异步电机作为推进电机,推动船舶运行,此时燃气轮机根据需要处于停转或惰转状态;②加速运行时,异步电机与燃气轮机共同推进。
按照燃气轮机的推动情况,混合动力系统可分为2种情况:①1台燃气轮机通过齿轮箱的传动作用,同时带2个螺旋桨负载,如图1 a)所示;②2台燃气轮机通过减速齿轮箱的传动作用,降低转速,各带1个螺旋桨负载,如图1 b)所示。

图1 船舶混合动力系统结构示意图Fig.1 Structure of ship with hybrid power
系统中柴油发电机组为整条船供电,包括设备用电、生活用电,以及异步电动机工作所需的电力。燃气轮机输出端可根据需要加减速齿轮箱,并且为实现动力切换,输出端须加自动同步离合器。选择1~2台燃气轮机是根据实际所要求的功率确定的。由于离合器的工作性质,为了实现倒车,可以使用可调桨距的螺旋桨,或者采用正、倒车减速齿轮箱。
并车系统的仿真控制结构如图2所示,整个系统由燃气轮机、异步电机、S.S.S.离合器、并车齿轮箱、并车控制器和螺旋桨等组成。
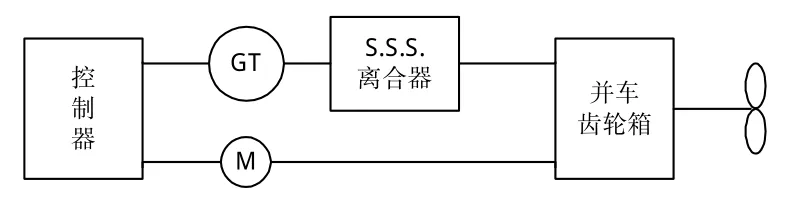
图2 并车仿真结构Fig.2 Structure of paralleling system
2 混合动力系统数学模型
2.1异步电机推进系统
异步电动机具有非线性、强耦合、多变量的性质,要获得高动态调速性能,必须分析异步电动机的转矩和磁链控制规律。目前,得到成熟应用的方案是矢量控制。本文使用的是电流跟踪PWM控制,控制结构如图3所示。
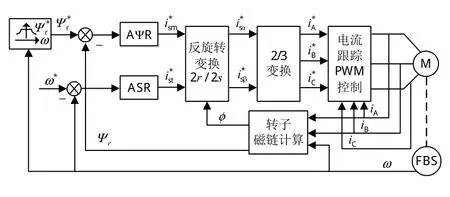
图3 三相电流闭环控制的矢量控制系统结构图Fig.3 Structure of vector control system controlled by 3-phase current
电流跟踪PWM控制系统的基本工作原理是:将定子电流2个分量的给定值和进行变换,得到三相电流给定值,与电机实际的三相定子电流比较,采用电流滞环控制型PWM变频器,改变定子三相电流。
对于所研究的异步电机,电动机输出的转矩与直流电源输出电压的大小、磁通大小成正相关关系。在启动和低速时,为了达到较大的转矩,快速提高转速,同时充分利用电机功率,磁通保持在一定水平;当转速超过基速时,在频率不变的情况下,就必须弱磁。为在弱磁时保持较大的电磁转矩,一般使磁通ψ按照与转子转速1/ωr成正比的关系变化,基本能够达到次最优的最大转矩输出[8]。
采用弱磁调节后,在基速区(基速nN以下范围),转矩恒定,磁链恒定;在弱磁区(基速nN以上范围),转矩与转速成反比关系,磁链与转速成反比关系,这样输出功率恒定。
弱磁调速应注意电机自身的电压、电流过载能力,即考虑由发热和功率决定的电压、电流限制。相关公式为[9]:

式(1)、(2)中:Vs是逆变器能够为电机提供的最大电压,受可调直流电压Vdc以及PWM调制策略限制;Is是电机能承受的最大电流,受逆变器电流等级和发热等级限制。
在确定转矩电流iq的限幅值时,应利用公式的变形确定。这样既保证了电机能够以较大的转矩加速,也能保证异步电机不会工作在超出额定功率的状态。
2.2燃气轮机推进系统
船舶燃气轮机主要由压气机、燃烧室和涡轮等部件组成[10]。燃气轮机是一种强非线性的气动热力学系统,其数学模型一直是人们研究的重点。部件法是常见的建模方法,但是这种方法严重依赖各部件的特性曲线。本文中,燃气轮机建模的重点是求得功率输出与2个工作参数,即动力涡轮转速和喷油流量的关系。燃气轮机的外特性表示燃气轮机动力涡轮输出力矩MPT,是关于动力涡轮转速和燃气轮机燃油供给量的函数,该特性在实际中表示为一条曲线[11]。
值得注意的是,该曲线是在燃气轮机稳定平衡工况下计算或测量得到的,而燃气轮机是一个大惯性系统,当燃油供给量变化时,动力涡轮力矩将明显滞后于外特性曲线上相应的数值,对于LM2500这样的大型燃气轮机,将在8~10 s后才达到外特性曲线所指示的数值[12]。为此,引入瞬态扭矩比KE,其定义为:

利用燃气轮机的外特性曲线和瞬态扭矩比KE曲线可以构建瞬态扭矩仿真模型,这2条曲线可以通过文献[12]得到。在仿真时,根据燃油量的变化规律,从外特性曲线上查取动力涡轮力矩MPT,乘以瞬态扭矩比KE,得到动态过程中动力涡轮瞬态转矩,该力矩可以作为惯性方程中的被积函数,进而求解得到燃气轮机转速。
2.3自动同步离合器
自动同步离合器,简称3S离合器(Synchronous-Self-Shifting Clutch)主要由主动件、从动件和中间件3部分组成。中间件在主动件上,二者以螺旋齿花键互相连接。3S离合器能够根据转速差自动地啮合和脱离,起到切入或切出动力的作用。
本文研究的为非中继式离合器,非中继式离合器依靠棘轮、棘爪完成离合,功率较中继式离合器小[13]。
3S离合器是研究并车控制过程中的关键,必须建立准确的数学模型。通过对主动件、中间件、从动件进行受力分析,可以得到相应的力矩方程。
主动件的力矩方程为

式中,J1、ω1、ε1分别为主动件的转动惯量、角速度和角加速度。
中间件的力矩方程为

从动件的力矩方程为

式中,J2、ε2分别为从动件的转动惯量和角加速度。
非中继式离合器受力分析的具体内容可参见文献[14-16]。
2.4并车齿轮箱
设M1、n1分别为设备1的输入转矩和转速,M2、n2分别为设备2的输入转矩和转速,M、n分别为输出转矩和转速,考虑齿轮箱传递功率的效率η,则有

2.5螺旋桨负载
螺旋桨吸收主机的功率并将其转换为船舶运动需要的推进力,并与船一起沿轴向移动。螺旋桨在水中运动时受到阻力矩Mp,其与螺旋桨的推力方向相反。为克服阻力矩而使螺旋桨按照给定转速np旋转,螺旋桨应发出推力Tp。
对于几何参数确定的螺旋桨,桨径D、水密度ρ都是常数,扭矩和推力表示为:
3 并车控制及仿真
3.1并车控制策略
考虑实际情况,设计舰船的工作过程为:正常运行时,舰船由异步电机驱动,此时燃气轮机可有2种工作方式,即处于停止工作状态或不为舰船提供功率的惰转状态,此时燃气轮机的输出转速低于并车齿轮箱输入轴处转速。当须要提高航行速度时,同时给定电机和燃气轮机的转速(另一种情况下燃机需加载到低于电机的转速),此时双机同时加速。设定正常航行时异步电机处于近额定工作状态,随着输出转速升高,转速超过异步电机的基速,异步电机进入弱磁调速范围,输出转矩下降,舰船推进所需的转矩相应由燃气轮机补足。如此进行下去,直到2台原动机达到各自的设定转速。本文中,异步电机和燃气轮机的设定转速相同,即认为并车齿轮箱中燃气轮机与电机的转速比为1∶1;其他比值可进行换算,不失一般性。
3.2并车控制器
常用的并车控制器有3种[17]:单反馈调速器、主从调速器、双反馈调速器。本文采用双反馈调速器作为并车控制器,双反馈调速器同时接收燃机和电机的转速反馈值,根据转速差在设定值的基础上修正当前燃机和电机的转速设定,其基本原理如下:
式(10)、(11)中:n0为设定转速;n1f为燃机的转速反馈值;n2f为电机的转速反馈值。
3.3仿真
异步电机模型采用Simulink模块库中的封装模型,功率为75 kW。燃气轮机采用160 kW的异步电机封装模型进行模拟。仿真使用固定步长的ode4算法,步长设为2 ms。异步电机的相关参数见表1。

表1 异步电机的参数Tab.1 Parameters of asynchronous moto
按照图2构建系统仿真模型,具体控制控制目标为:控制器控制异步电机起动到1 400 r/min,电机起动过程中负载转矩与转速平方成正比(以后的负载转矩始终与系统输出转速平方成正比);通过控制器设定异步电机起动0.7 s后,燃气轮机起动,设定燃气轮机起动完成后转速为1 300 r/min;燃气轮机起动完成后,双机共同等待提速指令;设定目标转速为2 800 r/min,双机开始并车。
异步电机起动完成后,承受负载转矩约为500 N⋅m。在燃气轮机起动过程中和等待并车过程中,由于转速小于异步电机,燃气轮机处于惰转状态,这样燃气轮机并不输出转矩。提速指令发出后,并车控制器工作。转矩设定将负载按照比例k=TGT/TM进行分配,本文中取k=9∶1,即并车后燃气轮机应能分配1 800 N⋅m大小的负载,电机应能分配200 N⋅m大小的负载。并车后双机输出转速应相等。
仿真时,并车齿轮箱考虑了0.97的能量传递效率,因而实际输出转矩将小于设定值。
混合动力控制系统仿真结果如图4~9所示。
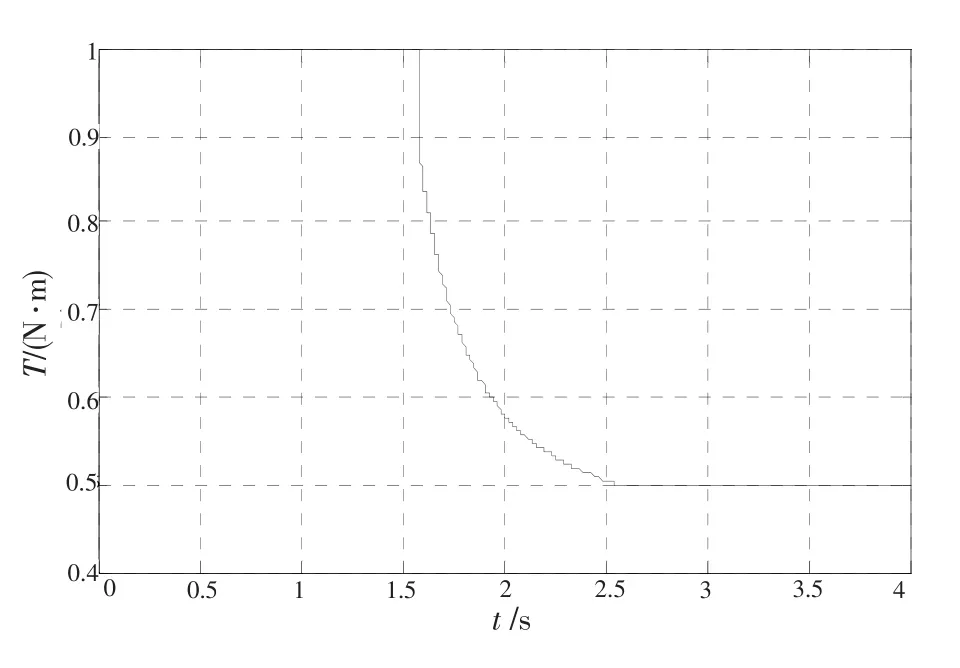
图4 异步电机给定磁链Fig.4 Setting flux linkage of asynchronous motor

图5 离合器中间件位移曲线Fig.5 Displacement of the middle part of S.S.S.clutch
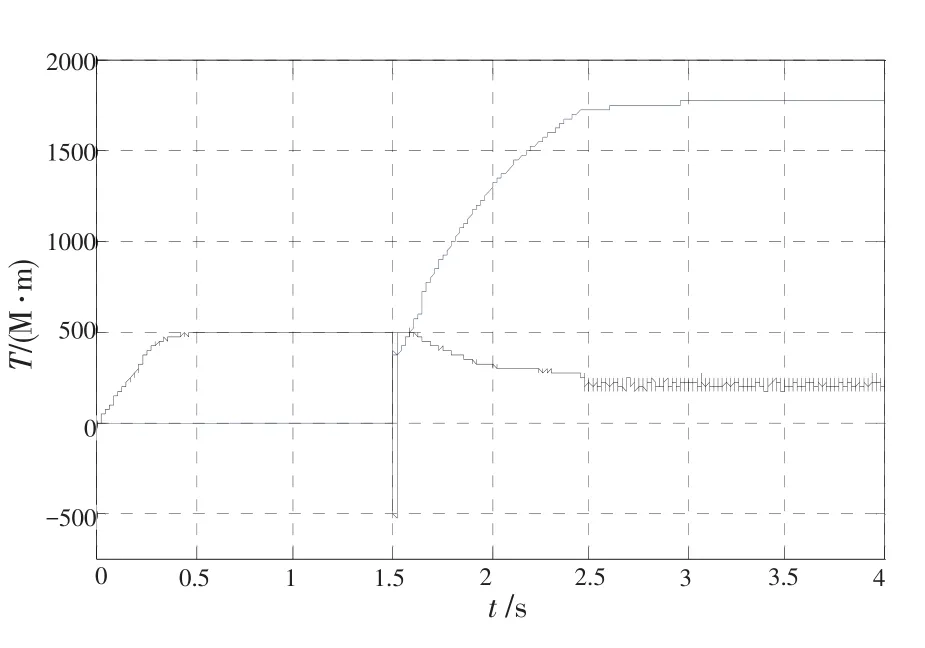
图6 燃气轮机和异步电机输出转矩Fig.6 Output torque of gas turbine and asynchronous motor
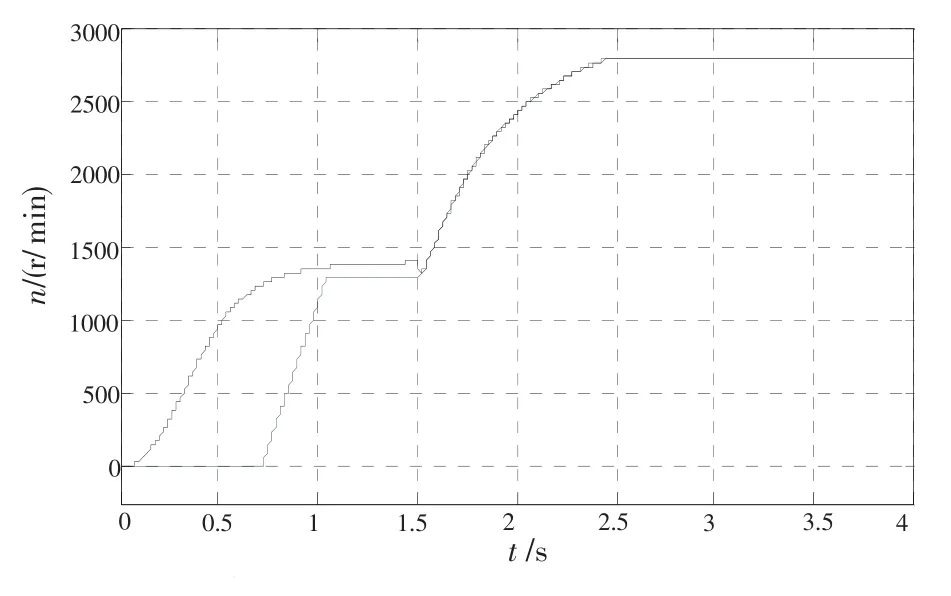
图7 燃气轮机和异步电机输出转速Fig.7 Output speed of gas turbine and asynchronous motor
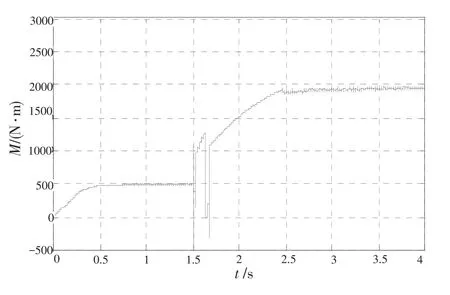
图8 并车齿轮箱输出转矩Fig.8 Output torque of gas paralleling gear box

图9 并车齿轮箱输出转速Fig.9 Output speed of gas paralleling gear box
从图4可以看出,异步电机在并车过程中很好地实现了弱磁调速;从图5可以看出,作为动力切入的关键部件,离合器的模型工作正常;从图6~9可以看出,仿真结果完全符合预期控制策略要求,燃气轮机在1.5 s时刻切入动力,从图8可以看到并车对输出转矩产生的冲击,从图9可以看到并车对输出转速的冲击。
4 结论
在对现有混合动力控制系统进行研究的基础上,本文提出了新型的燃气轮机和异步电机混合动力系统。采用模块化的设计方法,建立了燃气轮机、异步电机、S.S.S.离合器、并车齿轮箱、并车控制器和螺旋桨等部件的数学模型,进而构建了整个系统的仿真模型。利用外特性法建立了燃气轮机的仿真模型;采用电流滞环跟踪PWM方法建立了异步电机仿真模型,实现了弱磁调速;建立了S.S.S.离合器的可靠的仿真模型,能够研究并车时的冲击;设计了2种推进方式投切策略,实现了混合动力仿真;设计了并车控制器以实现并车过程调节。对混合动力控制策略和并车过程进行了仿真,仿真结果表明关于燃气轮机和电机这种新型混合动力系统的设计是正确的;双反馈的并车调节器及燃机、电机内部的各种调节器运行正常,并取得了很好的效果;离合器和并车齿轮箱等并车重要设备模型正确;控制策略设计是有效的,在并车控制器的调节作用下,能够减小并车时的冲击。因此,关于混合动力系统的整体设计是正确的,能够为后续这方面的研究提供一定的借鉴。
[1]王明为,糜杰,李淑英,等.CODAG动力装置控制系统研究[J].船舶工程,2006,28(2):39-42. WANG MINGWEI,MI JIE,LI SHUYING,et.al.Research on control system of combined diesel and gas turbine(CODAG)power plant[J].Ship Engineering,2006,28(2):39-42.(in Chinese)
[2]沈小刚,刘永文.船用同步离合器棘轮棘爪碰撞问题的仿真分析[J].船舶工程,2010,32(3):24-26. SHEN XIAOGANG,LIU YONGWEN.Simulation analysis of the diesel collision to the ratchet and pawl mechanism in marine synchronous clutch[J].Ship Engineering,2010,32(3):24-26.(in Chinese)
[3]王明为,糜杰,李淑英,等.CODAG动力装置控制系统研究[J].船舶工程,2006,28(2):39-42. WANG MINGWEI,MI JIE,LI SHUYING,et al.Research on control system of combine diesel and gas turbine(CODAG)power plant[J].Ship Engineering,2006,28(2):39-42.(in Chinese)
[4]李淑英,李杨,孙聿峰,等.柴—燃联合动力装置(CODAG)的实验研究[J].燃气轮机技术,2007,20(1):58-62. LI SHUYING,LI YANG,SUN YUFENG,et al.Experimental research of combined diesel and gas trubine(CODAG)plant[J].Gas Turbine Technology,2007,20(1):58-62.(in Chinese)
[5]王明为.柴—燃联合动力装置(CODAG)仿真与实验研究[D].哈尔滨:哈尔滨工程大学,2006. WANG MINGWEI.Study on simulation and experiment of CODAG power plant[D].Harbin:Harbin Engineering University,2006.(in Chinese)
[6]糜杰.CODAG柴燃(共同工作)联合动力装置测控系统研究[D].哈尔滨:哈尔滨工程大学,2006. MI JIE.The research of control system of combined diesel and gas turbine power plant(CODAG)[D].Harbin:Harbin Engineering University,2006.(in Chinese)
[7]何晓丽.舰船的动力[J].现代舰船,2010(11):61. HE XIAOLI.The power of ship[J].Modern Ships,2010(11):61(in Chinese)
[8]XU XINGYI.Selecting the flux reference for induction machine drives in the field weakening region[J].IEEE Transactions on Industry Applications,1992,28(6):1353-1358.
[9]KIM S H,SUL S K.Voltage control strategy for maximum torque operation of an induction machine in the field-weakening region[J].IEEE Transactions on Industrial Electronics,1997,44(4):512-518.
[10]张志华.船舶动力装置概论[M].哈尔滨:哈尔滨工程大学出版社,2001:73. ZHANG ZHIHUA.Introduction to marine power plant [M].Harbin:Harbin Engineering University Press,2001:73.(in Chinese)
[11]吴森,王永生.基于船用燃气轮机外特性的建模方法[J].中国造船,2008,49(4):61-64. WU SEN,WANG YONGSHENG.Establishing mathematical model method based on the external characteristic of maring gas turbine[J].Shipbuilding of China,2008,49(4):61-64.(in Chinese)
[12]翁史烈.船舶动力装置仿真技术[M].上海:上海交通大学出版社,1990:252-253.WENG SHILIE.The simulation technology of marine power plant[M].Shanghai Jiaotong University Press,1990:252-253.(in Chinese)
[13]江嘉铭.S.S.S.离合器的动力学仿真研究[D].哈尔滨:哈尔滨工程大学,2010. JIANG JIAMING.The study of the dynamics simulation for the S.S.S.clutch[D].Harbin:Harbin Engineering University,2010.(in Chinese)
[14]王敏.燃燃联合动力装置特性的仿真研究[D].哈尔滨:哈尔滨工程大学,2007. WANG MI.The simulation study on the dynamic behavior of COGAG power plant[D].Harbin:Harbin Engineering University,2007.(in Chinese)
[15]李杨.船用发电燃气轮机的仿真研究[D].哈尔滨:哈尔滨工程大学,2006. LI YANG.The simulation study on marine gas turbine of electricity generation[D].Harbin:Harbin Engineering University,2006.(in Chinese)
[16]田颖,孙聿峰,卢青春.基于Matlab的自动同步离合器建模与仿真[J].清华大学学报:自然科学版,2004,44(2):255-257. TIAN YING,SUN YUFENG,LU QINGCHUN.Simulation of synchronous-self-shifting slutches based on matlab [J].Journal of Tsinghua University:Science&Technology,2004,44(2):255-257.(in Chinese)
[17]徐斌.舰船主柴油机双机并车控制仿真技术的研究[J].上海船舶运输科学研究所学报,2001,24(2):96-101. XU BIN.The simulation research on the control technology of the naval ship’s paralleled main twin-engine[J]. Journal of Shanghai Ship Shipping Research Institute,2001,24(2):96-101.(in Chinese)
Hybrid Power Control Method of Ship Burning Gas Turbine and Motor
CHEN Hongli1,WANG Ziyuan2,ZHAO Kaiqi1
(1.College of Automation,Harbin Engineering University,Harbin 150001,China; 2.43thInstitute of China Electronic Technology Corporation,Hefei 230022,China)
By taking researching into current hybrid power system,a new hybrid system powered by gas turbine and asyn⁃chronous motor was proposed.Mathematical models of the different parts of the gas turbine and motor power system were researched in this paper.Module method was taken to build the simulation model of different parts,including gas turbine, asynchronous motor,synchronous-self-shifting clutch,parallel gear box,parallel controller and propeller,and obtain the whole system.The simulation model of gas turbine was built by external characteristic;asynchronous motor in method of current hysteresis band PWM control,and realized flux-weaking control;the S.S.S.clutch model was taken advantage of when paralleling.A strategy to switch between two patterns of shipping was designed,thus leading to the hybrid power sys⁃tem,a paralleling controller was applied to help paralleling.Researches were taken about the strategy of controlling of two power and shock when paralleling.It was proved in this paper that the whole hybrid system worked well,the parallel con⁃troller worked well to reduce the shock and the strategy of paralleling was efficient.
hybrid power;controller;parallel
U664.16
A
1673-1522(2016)01-0063-06
10.7682/j.issn.1673-1522.2016.01.012
2015-09-12;
2015-11-20
国家自然科学基金资助项目(51109047);黑龙江省自然科学基金资助项目(F201239)
陈虹丽(1963-),女,教授,博士。
猜你喜欢
山东冶金(2022年3期)2022-07-19 03:24:36
防爆电机(2020年5期)2020-12-14 07:03:58
防爆电机(2020年4期)2020-12-14 03:11:16
制造技术与机床(2017年4期)2017-06-22 11:17:44
风能(2016年12期)2016-02-25 08:45:56
燃气轮机技术(2014年4期)2014-04-16 03:54:07
燃气轮机技术(2014年4期)2014-04-16 03:54:04
燃气轮机技术(2014年4期)2014-04-16 03:54:02
燃气轮机技术(2014年4期)2014-04-16 03:54:01
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:10