
一种侧后雷达系统控制逻辑的设计研究
2016-11-10 07:38王崇阳
汽车实用技术 2016年9期
王崇阳
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
一种侧后雷达系统控制逻辑的设计研究
王崇阳
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
∶文章论述了基于微波雷达的侧后雷达系统的控制逻辑。该侧后雷达系统实现了盲区监测,换道辅助,倒车警告,追尾警告,开门警告功能。针对上述功能,逐一进行功能描述,论述了系统的控制逻辑设计。其内容主要包括系统各功能的开启条件,报警条件,报警类型和功能逻辑,最后综述了各功能报警逻辑的优先级。
∶微波雷达;控制逻辑;功能描述;开启条件;报警条件
10.16638/j.cnki.1671-7988.2016.09.058
CLC NO.: U463.65Document Code: AArticle ID: 1671-7988 (2016)09-169-06
前言
在现今的汽车行业中,车辆的驾驶安全性越来越受重视,车辆的安全性由被动安全逐步发展到主动安全。驾驶车辆的过程中车辆侧后方后视镜盲区是驾驶员的盲区,因此在高速换道、后方车辆超车、低速倒车时都会引发交通事故造成伤亡。侧后雷达系统是为了更好的满足于高速或者拥挤的城市交通驾驶者而设计的,通过安装在汽车尾部保险杠位置的24GHz微波雷达传感器来监测盲区内的车辆或行人,可以防止在变道时与盲区内的车辆或行人相撞。
微波雷达具有工作频率高,波长短,天线尺寸小,不但可以探测目标的距离,而且还可以测定相对速度和方位。适应性强,受雨雪雾等恶劣气候条件影响小;不受光线的影响,可在黑暗中正常工作等优点。
侧后雷达系统具备盲点监测功能(BSD)、换道辅助功能(LCMA)、倒车辅助警告功能(CTA)、防追尾警告(RCW)、开门警告(PW)。
1、侧后雷达系统的控制逻辑
侧后雷达具有盲区监测(BSD)、换道辅助(LCMA)、倒车辅助警告(CTA)、防追尾警告(RCW)和开门警告(PW)五个功能。各功能的监测区域以及监测目标均不相同,针对车辆的档位、速度和目标车辆的信息,采用不同的功能进行报警。
侧后雷达功能逻辑如图1所示。
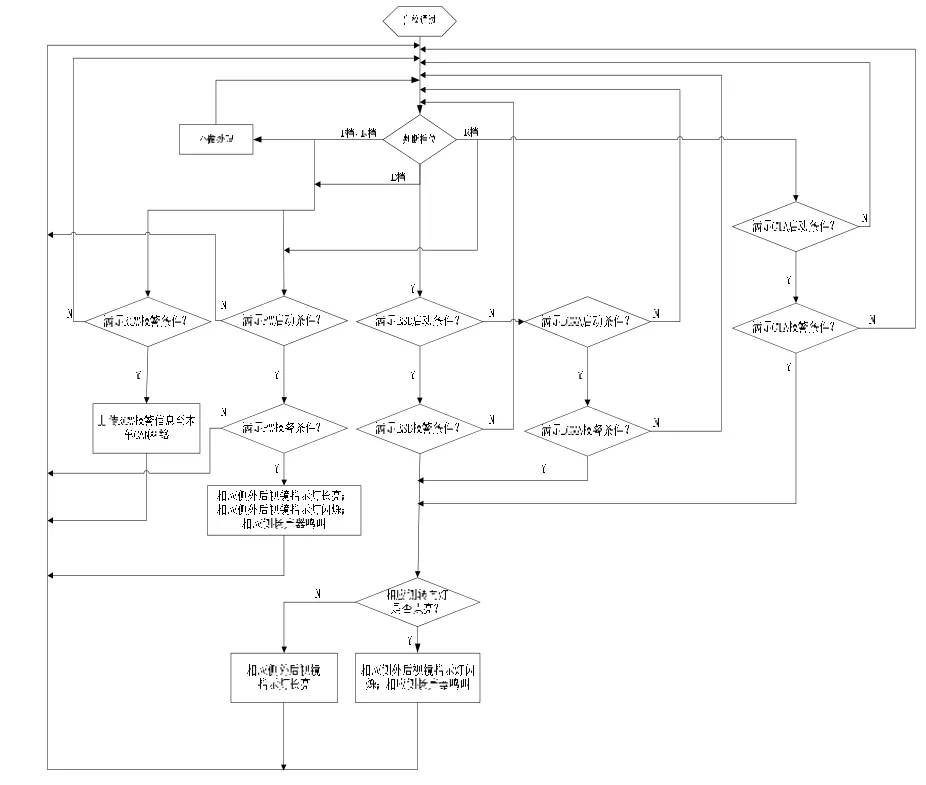
图1 侧后雷达功能逻辑图
2、侧后雷达系统功能描述
2.1盲区监测功能(BSD)
2.1.1功能描述
侧后雷达对本车的驾驶员视野盲区进行监测。当有车辆出现在该区域且满足报警条件时,将对驾驶员做出警告。盲区监测功能报警区域如图2所示。
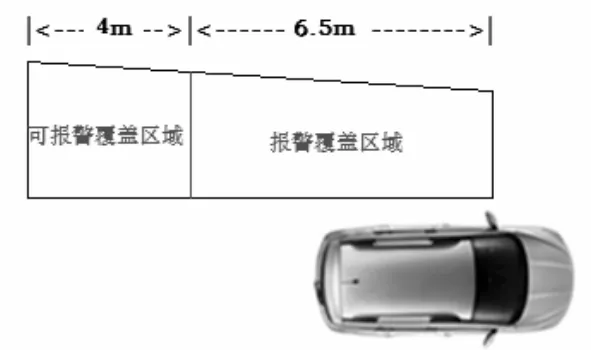
图2 盲区监测报警区域示意图
车辆两侧车道从外后视镜向车辆后方6.5米范围内为必须报警区域,6.5米至10.5米为可报警区域,可根据需要进行设置,不做强制要求。
2.1.2开启条件
盲区监测功能在路面弯道半径不小于170m且本车行驶速度不低于30km/h时启动,速度回落至25km/h及以下时禁止。在车辆进入倒档、空挡、停车档时,此功能禁止。
盲区监测功能的启动、禁止条件和报警逻辑如下所示。
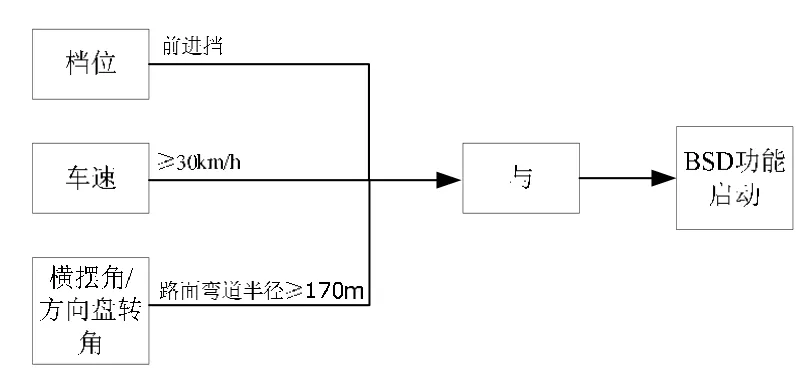
图3 BSD功能启动条件
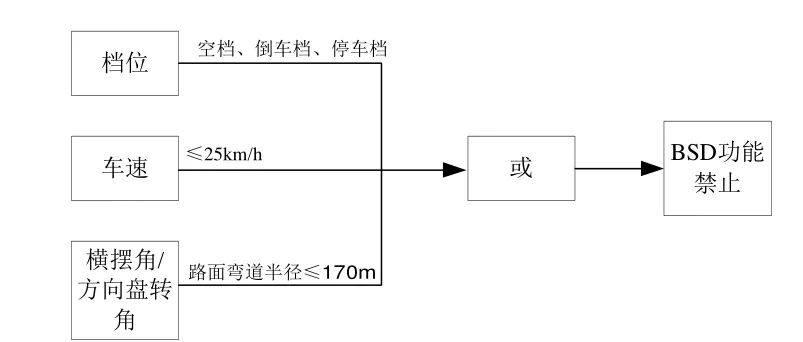
图4 BSD功能禁止条件
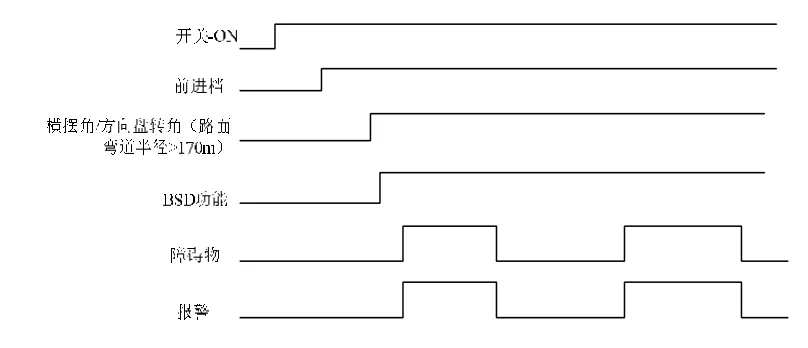
图5 报警逻辑图
2.1.3报警条件及类型
盲区监测的报警功能在以下情况中任意一种发生时生效:
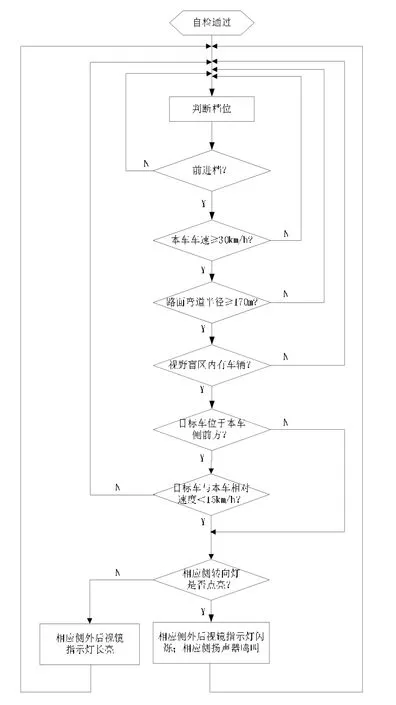
图6 盲区监测功能逻辑图
a) 当有车辆从后方进入本车盲区时,立即进行报警;
b) 当本车以小于15km/h的相对速度对目标车辆进行超车,使其进入本车视野盲区 时,进行报警。
盲区监测功能的报警类型有标准型报警和增强型报警两种。
a) 标准型报警
当有报警信息产生,且本车转向灯未点亮时,为标准型报警。此时,外后视镜处的报警指示灯长亮。
b) 增强型报警
当有报警信息产生,且本车转向灯点亮时,为增强型报警。此时,外后视镜处的报警指示灯闪烁,同时蜂鸣器鸣叫。
2.1.4多目标报警
盲区监测功能可对多个目标车辆进行监测,分析出各自的距离和速度信息,以最先达到视野盲区且速度符合报警条件的目标车辆为报警目标,对驾驶员做出提醒。
盲区监测功能的功能逻辑如图6所示。
2.2换道辅助功能(LCMA)
2.2.1功能描述
侧后雷达对本车的左右相邻车道进行监测,当有车辆从该区域迅速向本车靠近时,侧后雷达对其距离和速度信息进行分析,从而得出该车和本车可能发生碰撞的时间TTC。若TTC小于预设的报警阈值,则立即进行报警。
2.2.2开启条件
换道辅助功能在路面弯道半径不小于170m且本车行驶速度不低于30km/h时启动,速度回落至25km/h及以下时禁止。在车辆进入倒档、空挡、停车档时,此功能禁止。
换道辅助功能的启动、禁止条件如下所示。
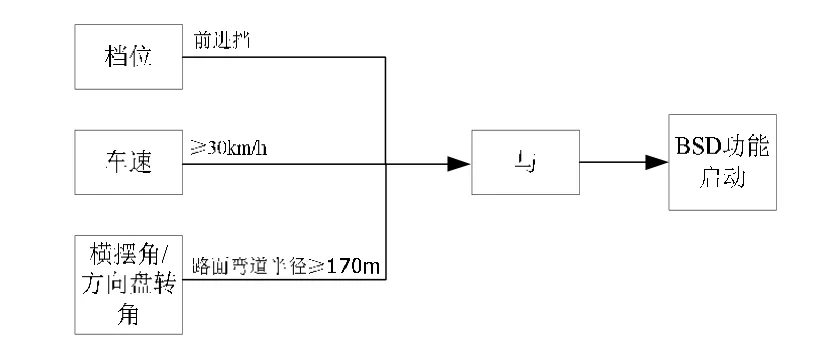
图7 LCMA功能启动条件
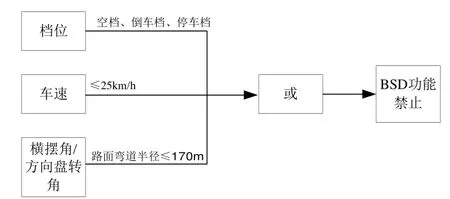
图8 LCMA功能禁止条件
2.2.3报警条件及类型
换道辅助的报警功能在满足以下条件时生效:

图9 换道辅助功能TTC——距离关系示意图
当有目标车辆从两侧车道快速迫近时,若潜在碰撞发生时间(TTC)小于预定安全反应时间,立即进行报警。
换道辅助功能的报警极限距离为70m。根据目标车辆与本车的距离不同,预定的报警阈值时间不同。换道辅助报警TTC值与距离之间的关系如图9所示。
换道辅助功能的报警类型有标准型报警和增强型报警两种。
a) 标准型报警
当有报警信息产生,且本车转向灯未点亮时,为标准型报警。此时,外后视镜处的报警指示灯长亮。
b) 增强型报警
当有报警信息产生,且本车转向灯点亮时,为增强型报警。此时,外后视镜处的报警指示灯闪烁,同时蜂鸣器鸣叫。
2.2.4多目标报警
换道辅助功能可对多个目标车辆进行监测,分析其各自的距离和速度信息,得出各目标车辆的TTC,以最先达到TTC报警阈值的目标车辆为报警目标,对驾驶员做出提醒。
2.2.5功能逻辑
换道辅助功能的功能逻辑如图10所示。
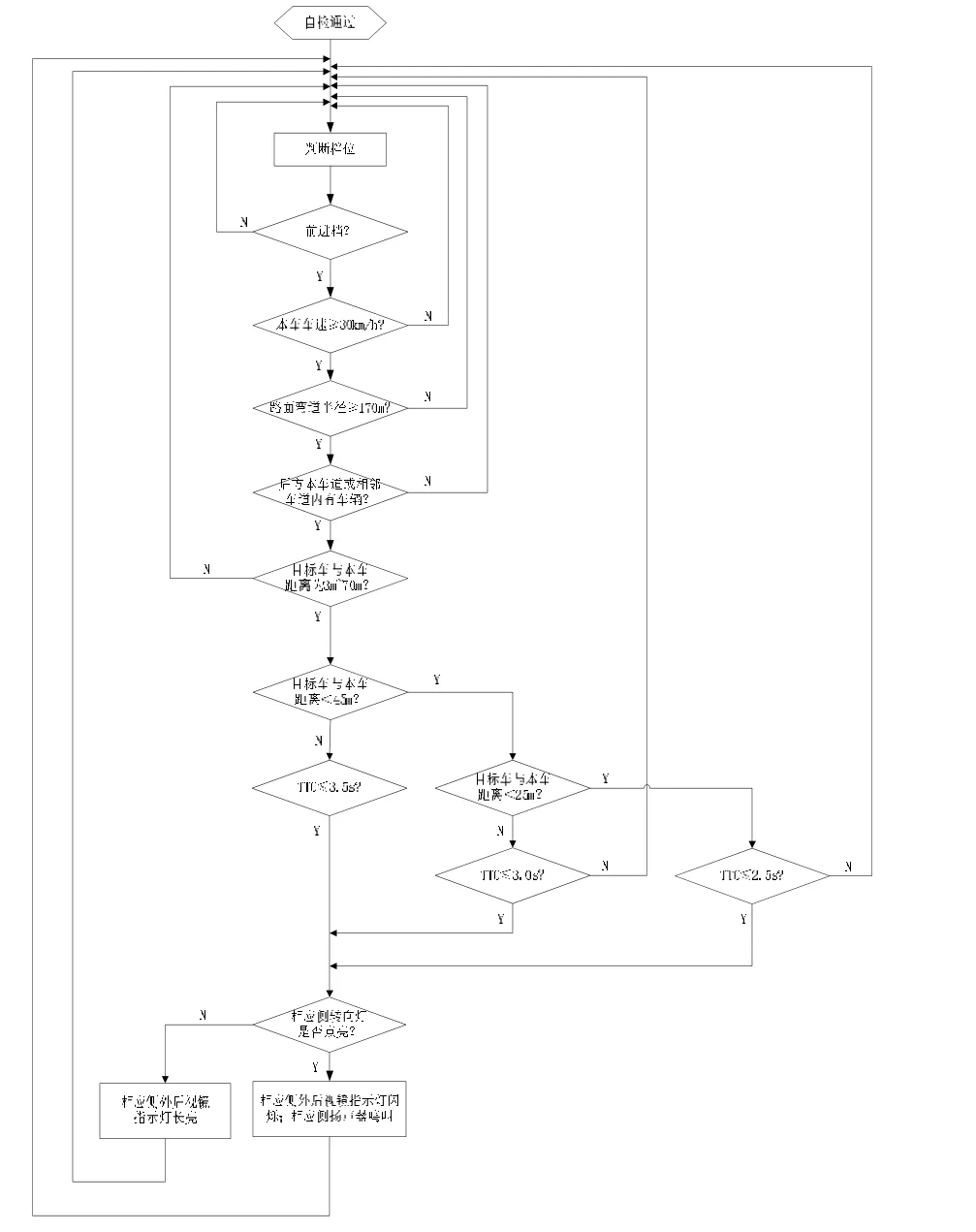
图10 换道辅助功能逻辑图
2.3倒车辅助警告(CTA)
2.3.1功能描述
在本车进行倒车时,侧后雷达可对本车后方的横向车道进行监测,分析该区域内车辆的运动轨迹,与本车的行驶轨迹进行比较,分析其与本车发生碰撞的可能性。当有碰撞可能时,及时对驾驶员做出警告。
在倒车区域较拥挤的场合下,或者驾驶员的视野由于建筑、植被或其他停泊车辆遮挡的情况下,该功能的作用十分明显。
2.3.2开启条件
倒车辅助警告功能在车辆处于倒档行驶且车速不低于2km/h时启动,速度回落至1km/h以下时禁止。在车辆进入倒档、空挡、停车档时,此功能禁止。
倒车辅助警告功能的启动、禁止条件如下所示。
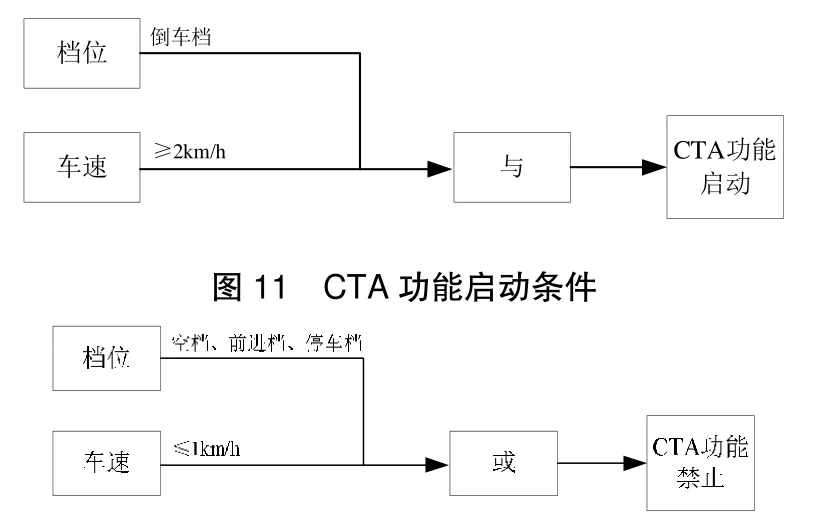
图12 CTA功能禁止条件
2.3.3报警条件及类型
倒车辅助的报警功能在同时满足以下条件时生效:
a)在倒车辅助警告功能覆盖区域内(如图13所示)有运动车辆;
b)目标车辆与本车潜在碰撞时间(TTC)小于预设安全反应时间(见图9)。
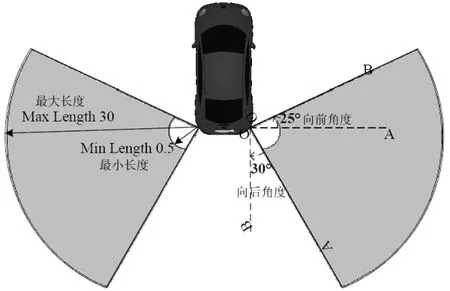
图13 CTA覆盖区域示意图
倒车辅助的报警功能在以下情形下不做报警:
a)目标车辆为静止状态;
b)目标车辆与本车行驶轨迹垂直速度小于4km/h。
倒车辅助警告功能的报警类型有标准型报警和增强型报警两种。
a)标准型报警
当有报警信息产生,且本车转向灯未点亮时,为标准型报警。此时,外后视镜处的报警指示灯长亮。
b)增强型报警
当有报警信息产生,且本车转向灯点亮时,为增强型报警。此时,外后视镜处的报警指示灯闪烁,同时蜂鸣器鸣叫。
2.3.4多目标报警
倒车辅助警告功能可对多个目标车辆进行监测,分析其各自的运动轨迹,得出各目标车辆的TTC,以最先达到TTC报警阈值的目标车辆为报警目标,对驾驶员做出提醒。
2.3.5功能逻辑
倒车辅助警告功能的功能逻辑如图14所示。

图14 倒车辅助警告功能逻辑图
2.4防追尾警告功能(RCW)
2.4.1功能描述
侧后雷达对本车后方车道进行监测。当有车辆从后方本车道快速逼近,存在与本车的碰撞风险,且潜在碰撞时间小于预设警告阈值时,立即生成报警信息并上传至车辆CAN网络,控制车辆执行报警动作。防追尾警告的最大报警距离可支持到70m(见图15)。
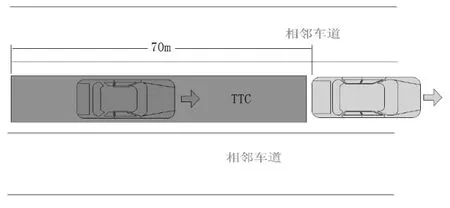
图15 防追尾警告区域示意图
2.4.2 开启条件
防追尾警告功能在本车处于非倒档状态时即启动,无车速限制,用户可通过车内MP5上的RCW功能开关对其进行开启和关闭。
2.4.3报警条件及类型
防追尾警告的报警功能在同时满足以下情况时生效:
a)有车辆位于后方本车道,与本车的距离小于70m;
b)目标车辆与本车的潜在碰撞时间(TTC)小于3s。
防追尾警告的报警类型为:
当有报警信息产生时,雷达模块立即将该信息传送给车辆CAN网络,控制本车的刹车灯进行闪烁,提醒后方车辆的驾驶员注意,及时采取措施。
2.4.4功能逻辑
防追尾警告功能的功能逻辑如图16所示。
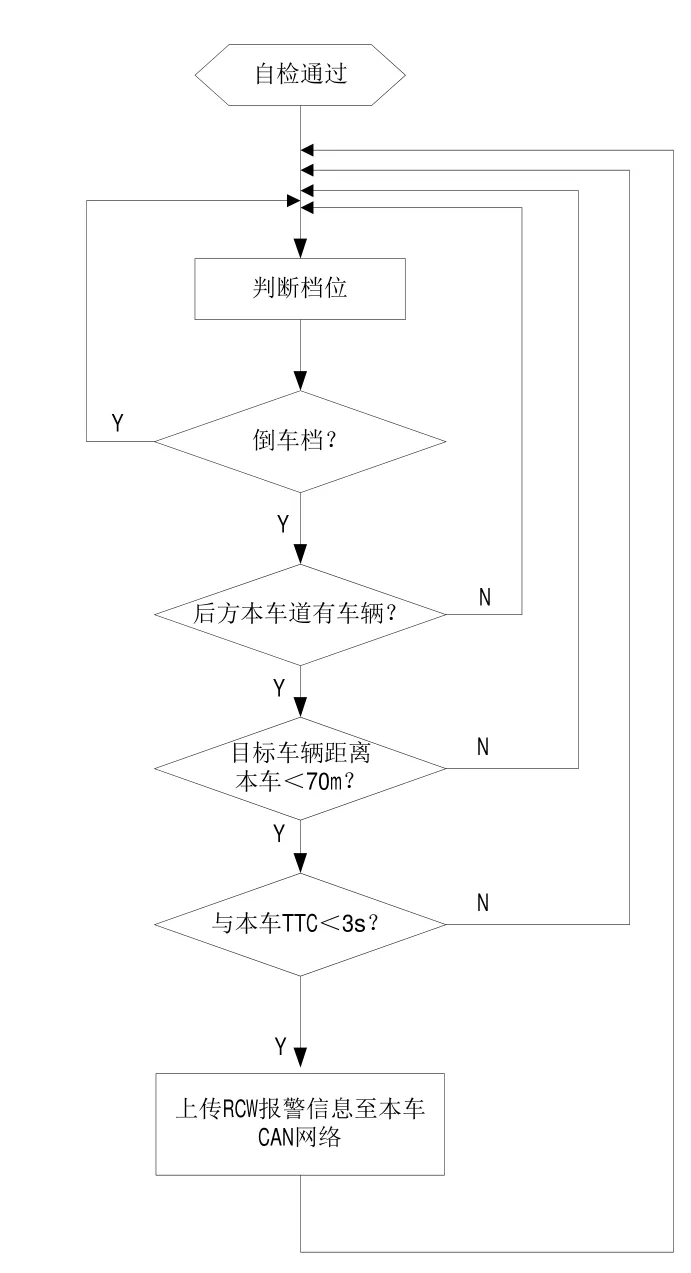
图16 防追尾警告功能逻辑图
2.5开门警告功能(PW)
2.5.1功能描述
当车门打开,乘客准备下车时,侧后雷达对该侧相邻车道进行监测,判断有无车辆碰撞风险,当有危险信息时及时发出报警,避免人身伤亡。
2.5.2开启条件
防追尾警告功能在雷达系统上电工作时即可启动,无档位及车速限制,用户可通过车内MP5上的PW功能开关对其进行开启和关闭。
2.5.3报警条件及类型
开门警告的报警功能在同时满足以下情况时生效:
a)有车辆位于本侧相邻车道,与本车的距离小于20m;
b)目标车辆与本车的潜在碰撞时间(TTC)小于3s。
开门警告的报警类型为:
当探测到开门侧相邻车道内有车辆靠近,满足报警条件是,该侧的外后视镜指示灯立即开始闪烁,同时该侧蜂鸣器进行鸣叫,提醒下车人员注意。
2.5.4功能逻辑
开门警告功能的功能逻辑如图17所示。
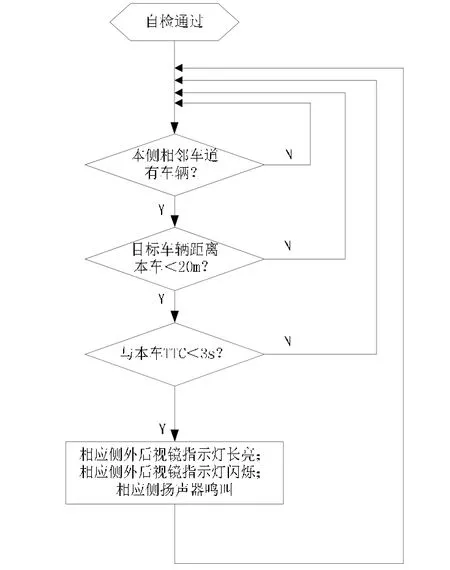
图17 开门警告功能逻辑图
2.6报警优先级
侧后雷达可同时对其覆盖区域内的多个目标进行监测,根据各目标的当前状态判断其报警优先级,当某一目标达到报警条件时,立即进行报警。各功能多目标探测报警优先级如表1所示。
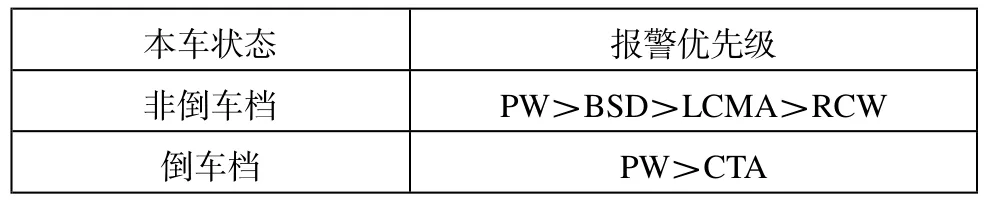
表1 侧后雷达多目标报警优先级列表
2.7各工作状态切换流程图
车辆的工作状态有停车、空档、行车和倒车四种,BSD、LCMA和CTA在这四种状态下的启动与切换状态如图18所示。
2.8报警与显示
2.8.1标准型报警
当报警时,转向灯开关未开启,报警灯保持长亮状态。
2.8.2 增强型报警
当报警时,转向灯开关开启时,报警灯闪烁(闪烁频率为100ms(亮)/50ms(灭)),如图19所示,并伴随蜂鸣器报警。
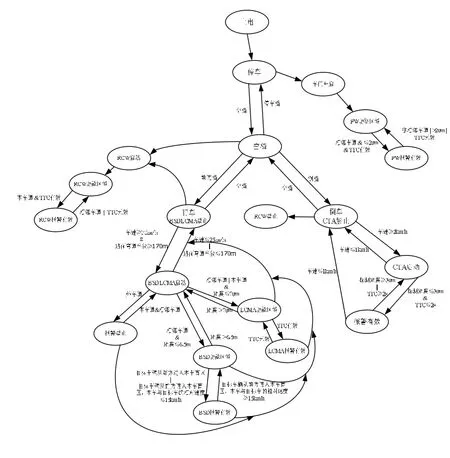
图18 各工作状态切换流程图

图19 灯闪烁周期
2.9各功能开启条件
侧后雷达各功能开启条件见表2。
3、结论
本文从侧后雷达系统整体控制逻辑开始进行分析,介绍了系统的控制逻辑流程。然后详细介绍了系统中盲区监测,换道辅助,倒车辅助警告,防追尾警告和开门警告五个功能的功能描述,开启条件,报警条件及类型和功能实现的逻辑流程,最后说明了各功能报警的优先级设计及各工作状态间转换的流程。
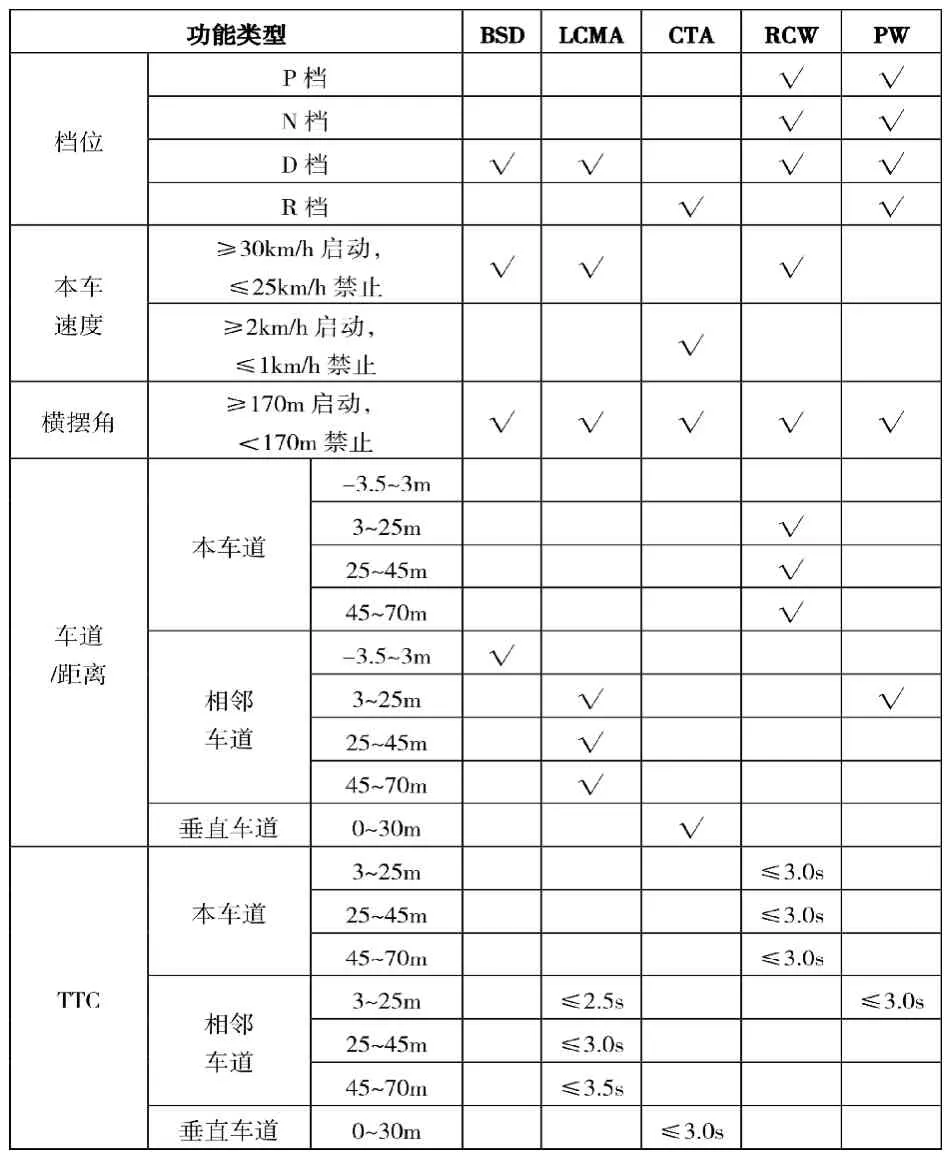
表2 侧后雷达各功能开启条件表
[1] ISO17387Intelligenttransportsystems-Lanechangedecisionaidsystem s(LCDAS).
[2] 张洪波,刘艳.丰田倒车侧方盲点监测系统发展[J].汽车与配件, 2014,(36).
[3] 陈迪峰,冯曙,姜凤春.汽车智能化技术分析(II)[J].汽车电器,2011,(06).
A control logic design research of one rear flank radar system
Wang Chongyang
(Anhui Jianghuai Automobile Co., Ltd, Anhui Hefei 230601)
This paper discusses the control logic of the rear flank radar system based on microwave radar. This rear flank radar system has realized the function of the blind spot detection, lane change merge assist, cross traffic alert, rear collision warning and passenger door open warning. For the above function, this paper describes the functional one by one and discusses the control logic design of the system. The content mainly includes open condition, alarm condition, alarm type and functional logic for each function of the system. At last, the paper reviews the progress of the functional alarm logic priority.
Microwave radar; Control logic; Functional description; Open condition; Alarm condition
∶U463.65
∶A
∶1671-7988 (2016)09-169-06
王崇阳(1988—),男,助理工程师,就职于安徽江淮汽车股份有限公司,从事汽车设计。
猜你喜欢
小哥白尼(神奇星球)(2021年6期)2021-07-28
文萃报·周二版(2019年8期)2019-09-10
小雪花·初中高分作文(2019年2期)2019-06-27
知识就是力量(2018年8期)2018-08-16
汽车维护与修理(2016年10期)2016-07-10
为了孩子(3~7岁)(2016年5期)2016-05-14
汽车维护与修理(2016年3期)2016-02-28
中学生天地(B版)(2015年11期)2015-09-10
小学生·多元智能大王(2015年3期)2015-05-25
环球时报(2009-06-12)2009-06-12
