
IH电磁加热电饭锅模糊逻辑智能控制系统设计
2016-11-09 07:32杨文龙王春梅
电子设计工程 2016年19期
杨文龙,王春梅
(1.广东省电子职业技术学校 广东 广州510515;2.广东金融学院 互联网金融与信息工程系,广东 广州510521)
IH电磁加热电饭锅模糊逻辑智能控制系统设计
杨文龙1,王春梅2
(1.广东省电子职业技术学校 广东 广州510515;2.广东金融学院 互联网金融与信息工程系,广东 广州510521)
本文针对当前IH电磁加热电饭锅,采用单片机控制技术,运用模糊逻辑控制原理进行系统控制设计。文中对整个控制系统的工作机制作了全面的论述,特别是对电饭锅整个煮饭加热过程模糊逻辑控制、米量测定模糊推理的算法作了深入的分析,并给出了模糊逻辑温控程序代码。实践证明,模糊逻辑控制的IH电磁加热电饭锅,米量判断准确,受热均匀,煮饭加温工艺曲线符合要求,智能化程度高。
IH;电饭锅;模糊逻辑控制;模糊推理
传统的电饭锅大多数是磁钢控制的,从开始煮饭就全功率加温,当磁钢居里温度点温度(105℃)时,磁钢失去磁性而断开电源,加热工序无法控制,米饭质量不高。后来引入单片机控制加热工序,模拟人们煮饭温度调节过程,能实现吸水、沸腾和焖饭3个阶段控制,米饭质量有所提高,但热源还是采用底盘发热丝,存在热效率低(<60%)及受热不均匀等问题,米饭质量还是比不上碳烧工艺的米饭。为了解决电饭锅受热均匀问题,将IH(Induction Heating)电磁感应加热技术取代传统的电饭锅电热丝发热盘[1],使热效率大大提高(>90%),能实现全方位的立体加热,使得煮饭受热均匀,再利用基于单片机的模糊逻辑控制[2],根据煮饭专家的工艺,控制整个煮饭过程各阶段的温度,获得最佳质量的米饭。
1 IH模糊逻辑智能控制电饭锅系统结构
1.1IH电磁加热工作机制
电磁感应加热技术是通过电磁加热装置的转换,将交流电变换成直流电压,再经过逆变INVERTER控制电路将直流电压转换频率为20~40 kHz的高频电压去驱动线圈,高频电流在线圈内产生高频磁场,当磁场内的磁力线穿过导磁金属材料时,导磁金属是将产生无数小涡流(高频电流),使容器底部发热。如图1所示。
采用20 kHz以上高频振荡,可以避免因负载的产生机械噪音。IH具有高火力、高效率和节能等特性。调整线圈的几何结构,使得电饭锅底部和侧向全方位加热,使米饭受热更均匀。IH是在越来越多的产品和领域开始被广泛应用的一种加热方式,正逐步代替传统加热方式成为新的热源。
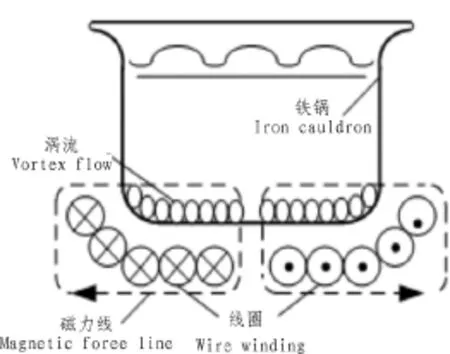
图1 IH电磁加热原理
1.2IH电饭锅系统结构
IH电磁加热糊逻辑控制的电饭锅系统结构如图2所示,由单片机控制与键盘/显示器接口电路、温度检测电路、IGBT功率驱动电路,电源电路等组成。单片机采用STC12C5A60S2单时钟/机器周期 (1T)的高速单片机,最高时钟频率为35 MHz,指令系统与MCS51完全兼容,内部集成MAX810专用复位电路、2路PWM和8通道10位高速A/D转换器。
单片机采样锅底和锅盖的温度,有A/D转换器转化为数字信号,进行模糊推理、智能判断米量和模糊逻辑控制[3]。利用单片机内部的PWM (脉宽调制Pulse Width Modulation)模块输出PWM信号去驱动IBGT管。加热线圈L和补偿电容C组成并联谐振回路。220 V交流直接通过桥式整流器整流输出脉动直流,再经滤波电容C2后平滑后得到高压直流,施加到LC并联谐振回路,并由IGBT管控制。
单片机输出PWM信号经光电耦合器隔离后去控制IGBT功率开关管,按一定频率导通和截止使LC并联谐振电路工作。谐振回路交变电流在感应线圈L的周围感应出高频交变的磁场,使位于磁场内的锅底部铁磁材料感应形成涡流而发热。高频磁场强度取决于PWM信号的占空比。此外在电源电路中还增加了过流检测电路,单片机一旦检测到电源电流超限,将切断PWM信号,起保护作用。
2 煮饭的加热温度工艺曲线
煮饭的主要目的是将大米中含有的β淀粉转化为人体所能吸收的α淀粉。根据如图3所示的煮饭专家最佳加热温度工艺曲线,煮饭的过程可分为吸水、加热、沸腾、焖饭、膨胀和保温6个阶段。
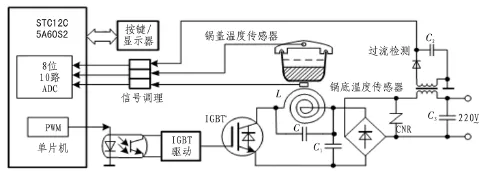
图2 IH模糊逻辑控制电饭锅系统结构
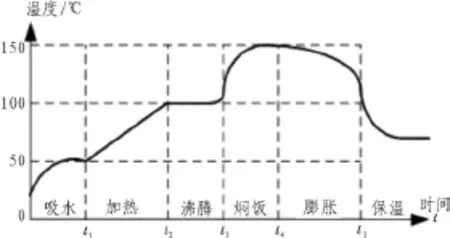
图3 煮饭最佳加热温度曲线
①吸水阶段
大米的含水量通常为14%,在加热之前要求大米含水量达到25%,才能使大米加热阶段的加热趋于均匀,并能透到米粒中心部位,使饭粒饱满和松软。大米吸水速度与水温成正比,实践证明吸水阶段水温应低于56℃。
②加热阶段
加热阶段是使水温从56℃不断均匀上升对大米进行加热,直到沸腾。大米在加热阶段继续吸收水分并开始淀粉α化。由于水温的升高,水分子急剧运动使水形成对流,所有的大米都能够充分均匀受热。升温速度与米量有关,将影响米饭质量。
③沸腾阶段
沸腾阶段是使淀粉在100℃高温状态下继续α化。随着水分的进一步减少,锅内趋于干燥,锅内的米饭温度继续升高,当锅底温度到达125℃时沸腾过程结束。
④焖饭阶段
焖饭阶段使热量渗透到米饭的芯部,使米饭充分受热而内外质量保持一致。该过程中,锅内温度上升高达153℃。在此高温下,米芯的淀粉α化,内外都熟透,并使饭面多于的水分蒸发掉。在米饭温度达到153℃时,停止加热。
⑤膨胀阶段
膨胀阶段停止加热,但仍处于高温使饭面中水分进一步蒸发膨胀使米饭松化的过程。
⑥保温阶段
在米饭温度下降到70℃时,通过低功率加热使米饭温度维持在70℃左右,保持米饭质量完好。
3 模糊逻辑控制设计
3.1米量测定模糊推理
在模糊控制电磁电饭煲中,控制过程的各段时间与米量直接相关。在电饭锅锅内室温tr恒定的情况下,温度变化率和米量Q有关,其变化程度也与初始水温不同而异[4]。在电饭锅刚开始煮饭的半分钟内,由锅盖温度传感器测得室温tr,锅底温度传感器测得初始水温t0,然后进入加热吸水阶段。在室温tr为恒定情况下,根据初始水温t0和锅底温度变化率Δtd和推断米量Q。如图4所示。
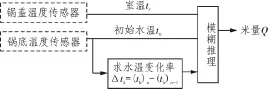
图4 米量模糊推理
将t0、Δtd和Q的模糊化为5个模糊量,其中t0、Δtd的隶属函数为梯形函数,Q用单点表示。如图5所示。
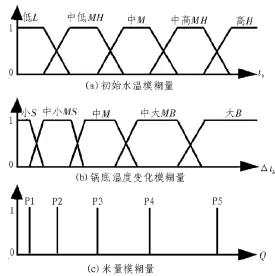
图5 米量隶属函数
由于室温为恒定值,米量Q的模糊推理可视为双输入单输出系统,控制规则为:“if t0 andΔtb then Q”,模糊推理规则如表1所示。
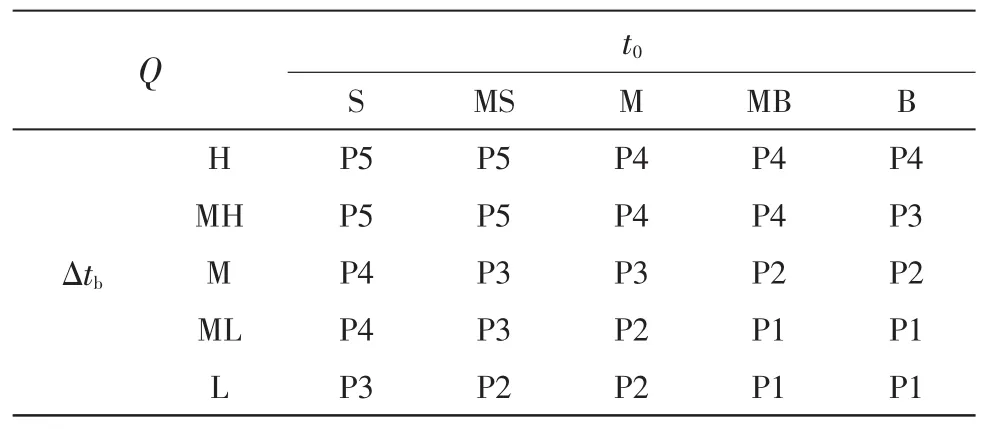
表1 模糊推理规则
表1共有25条推理规则,例如第i条“if t0=M andΔtb=Sthen Q=P4”,用fM(t0)表示t0对M的隶属度,fS(Δtb)表示Δtb对S的隶属度,采用极大极小运算,则有第i条控制规则隶属度为:

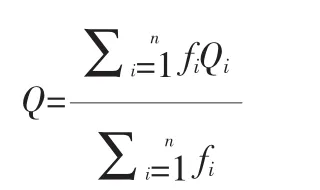
根据此算法,对n条的推理规则就有n个隶属度f1,f2,……fn,以fi作为Qi的加权系数,采用加权平均求得米量Q值:
3.2温度控制模糊推理
模糊控制电磁电饭煲煮饭过程的各个阶段的温度控制采用模糊控制的方式。由煮饭专家提出的煮饭最佳工艺曲线可知,煮饭过程的温度控制主要有两种情况,一种是恒温控制,另外一种是升温控制。恒温控制主要用于沸腾和保温阶段,升温控制主要用于吸水、加热和焖饭阶段。无论是哪一种温度控制,都是采用闭环控制,给定的参考温度tref与锅底传感器检测到的加热温度tb进行相减,获得温度偏差e=tref-tb,并计算温度偏差变化率 Δe=en-en-1,温控模糊推理是根据e和Δe来确定PWM信号的占空比去调节输出功率,从而达到温控的目的[5]。如图6所示。
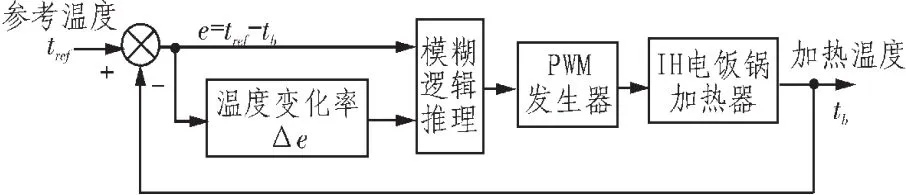
图6 模糊逻辑温控模型
对于恒温控制,温度给定值terf为恒定值。把温度偏差e和偏差变化率Δe都分成负大(NB)、负小(NS)、零(O)、正小(PS)、正大(PB)5个模糊量,其隶属函数仍然采用梯形函数。把输出控制量PWM信号的占空比分成为 10%、20%、30%、40%、50%、60%、70%、80%、90%共 9个单点模糊量。如图7所示。

图7 温控隶属函数
温度控制的模糊控制过程与米量测定模糊推理过程类似,它是一个双输入单输出系统。恒温模糊控制的推理表,如表2所示。
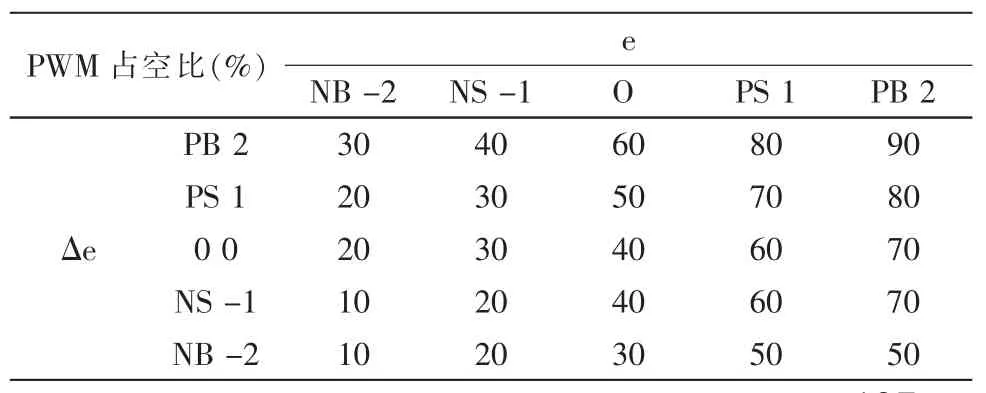
表2 模糊推理表
升温控制与恒温控制的原理类似,不同之处在于对于升温控制,按煮饭曲线要求,温度的给定值tref随时间上升。
4 模糊逻辑温控程序设计
根据表2模糊推理表进行查表,以便输出表格中规定的占空比PWM信号[6]。将偏差e和偏差变化Δe的5个模糊量论域都取为{-2,-1,0,1,2},程序代码如下:
MOVA,R7;R7为偏差e
ADDA,#2;转换为表格列号
MOVR7,A;暂存
MOVA,R6;取偏差变化Δe
CLRC;为减法清借位
SUBBA,#2;变为表格行号
MOVB,#5;每行5个字节数
MULAB;行号乘以5
ADDA,R7;加上列序号
MOVDPTR,#TAB;取表首地址
MOVCA,@DPTR+A;查表获得PWM占空比
LCALL PWM ;调用输出PWM子程序
RET;返回
TAB:DB 30,40,60,80,90;PWM占空比表
DB20,30,50,70,80
DB20,30,40,60,70
DB10,20,40,60,70
DB10,20,30,50,50
程序中LCALL PWM指令是利用STC12C5A60S2单片机内部的PWM模块,调用PWM输出子程序,将累加器ACC中的查表值作为PWM信号的占空比,由P1.3输出PWM控制信号去驱动IGBT。
STC12C5A60S2单片机内部的PCA(可编程计数器阵列)模块包含2个结构相同的16位捕捉/比较计数器,每个模块可编程为外部脉冲捕捉模式、软件定时模式、高速输出模式及PWM输出模式,由模块模式寄存器CCAPMn来设置。CCAPMn的代码为42H时,相应的PCA模块工作在 8位PWM输出方式。当PCA计数器低8位(CL)大于或等于比较/捕捉寄存器低8位CCAPnL时,PWM输出为高电平;当CL的值小于比较/捕捉寄存器低8位CCAPnL时,PWM输出为低电平。图8给出3种不同的PWM信号,图8(a)是一个占空比为10%的PWM输出,即在信号一个周期中,10%的时间为高电平,其余90%的时间为低电平。图8(b)和图8(c)分别是占空比为50%和90%的PWM输出。不同的PWM输出使得IGBT管输出功率不同。
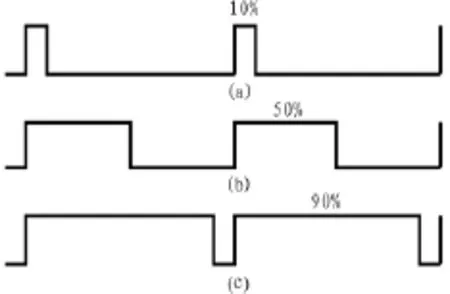
图8 三种占空比的PWM波形
5 结束语
IH智能电饭锅是目前电饭锅的新产品,文中利用单片机模糊逻辑控制技术,对IH电饭锅智能化设计,实践证明,基于模糊控制的IH电饭锅确实能煮出高质量的米饭,代表目前电饭锅的最先进的技术,对推动我国电饭锅设计和生产具有重要的参考意义[7]。
[1]申宇辉,刘迎晨.IH技术应用的发展和前景[J].现代家电,2006(9):47-74.
[2]杨文龙.单片机原理与应用[M].北京:清华大学出版社,2011.
[3]杨文龙.虚拟仪器及其在信号处理实验中的应用[J].实验室研究与探索,2007,26(12):297-309.
[4]林茂先,张建军,叶向阳,等.一种电饭锅模糊控制器[J].电子技术应用,1996(5):58-60.
[5]毛兆荣,刘杰.PIC16C56单片机在模糊控制电饭锅中的应用[J].电子技术应用,1997(4):29-31.
[6]沈杰,靳东明,李志坚.模糊控制和模糊控制芯片[J].电子学报,1997(2):51-55.
[7]Jerry M.Mendel.基于不确定规则的模糊逻辑系统:导论与新方向[M].北京:清华大学出版社,2013.
Design of fuzzy logic intelligent control system for IH electromagnetic heating electric cooker
YANGWen-long1,WANG Chun-mei2
(1.Guangdong Vocational School of Electronic Technology,Guangzhou 510515,China;2.Departmentof InternetFinance&Information Engineering,GuangdongUniversityof Finance,Guangzhou 510521,China)
This paper is to explain the design of control system of the current IH electromagnetic heating electric cooker by introducing the single chipmicrocontroller control technology and advancing fuzzy logic control principle.The comprehensive description of the workingmechanism of the whole control system ismade,especially,the fuzzy logic control of heating process of the electric cooker and the fuzzy inference algorithm tomeasure rice quantity are in-depth analyzed in the paper. The control temperature program code is given by fuzzy logic,which is to realize the intelligent controlling ofelectric cooker. Practice has proved that IH electromagnetic heating electric cooker by fuzzy logic control has accurate to measure rice,uniform heating,cooking heating process curve conform to requirements,high intelligence.
IH;electric cooker;fuzzy logic control;fuzzy inference
TN99
A
1674-6236(2016)19-0135-04
2015-10-04稿件编号:201510009
2015年广东省重大科技专项(2015B010124004);广东金融学院校级项目(SY2014A08,E20510014068)
杨文龙(1958—),男,广东大埔人,高级讲师,高级工程师。研究方向:信号处理和测控技术。
猜你喜欢
原子与分子物理学报(2020年5期)2020-03-17
小学阅读指南·低年级版(2017年5期)2017-05-18
今古传奇·故事版(2016年23期)2017-01-12
现代电子技术(2016年15期)2016-12-01
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
