
基于融合模型的高精度倾角测量系统设计*
2016-11-08 09:25王一焕
传感技术学报 2016年10期
刘 伟,李 杰,王一焕
(中北大学电子测试技术重点实验室,太原030051)
基于融合模型的高精度倾角测量系统设计*
刘伟,李杰*,王一焕
(中北大学电子测试技术重点实验室,太原030051)
针对现有倾角测量在宽范围内误差大的问题,提出了一种基于融合模型的高精度倾角测量系统设计方案,首先通过测量误差机理分析建立双MEMS加速度计的融合模型,再拟定标定方案确定模型相关参数,最后对硬、软件进行设计,可实现0~360°内角度的高精度测量。经高精度转台对比实验验证,该设计系统具有功耗低、宽测量范围内精度高等优点,能够实现在宽范围(0~360°)的高精度测量,且测量精度达到±0.05°。
MEMS加速度计;倾角测量;融合模型;系统标定
EEACC:7220doi:10.3969/j.issn.1004-1699.2016.10.025
倾角测量技术在建筑、机械制造、设备安装、道路桥梁监测、航空航海等民用或军事领域中有着重要的应用。然而,目前工程中的倾角测量大多数还沿用传统的水平尺,市面上现有的数字倾角仪,为了保证其测量精度,测量范围大多选择在±10°或±30°内,测量精度也多在±0.1°左右,当超过其测量范围就无法保证测量精度。这样一来,对数字倾角仪的推广进而取代传统测量工具仍有较长的距离。为了在宽测量范围内保证高精度的倾角测量,本文提出了一种双加计融合的测量方法并完成相应的硬、软件设计,通过测量误差机理的分析建立双加计融合模型,利用转台标定计算出测量模型所需待定参数进行解算,最后对系统误差进行补偿,从而提高倾角测量精度[1]。
1 融合测量原理
MEMS数字倾角仪的核心敏感单元大多为单轴或集成多轴MEMS加速度传感器。当MEMS倾角仪与水平面存在某一角度θ时,利用其内部加速度传感器输出的加速度值与重力加速度之间的数学关系得到所测量角度[2]。
根据单轴加计的输出特性,该角度可表示为:

式中,Uout为加计输出电压,U0为加计零位电压,K为加计标度因数,g为当地重力加速度。
根据集成双轴加计(ADXL202为例)的输出特性,该角度可表示为:

式中,Ai为i轴加计输出加速度值,i为X、Y。
根据集成三轴加计(ADXL345为例)的输出特性,该角度可表示为:
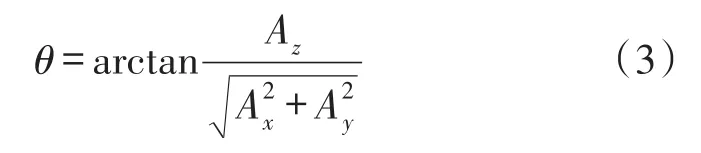
式中,Ai为i轴加计输出加速度值,i为X、Y、Z。
本系统采用两只单轴MEMS加速度计敏感轴相互正交放置的融合模型,具体放置方式如图1所示。
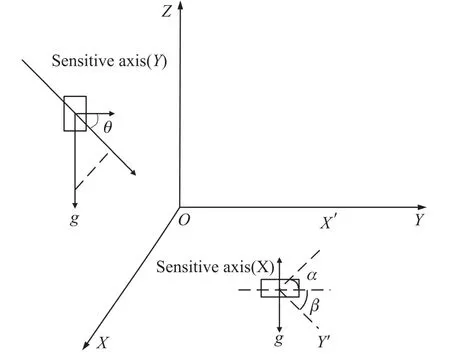
图1 MEMS加速度计放置关系
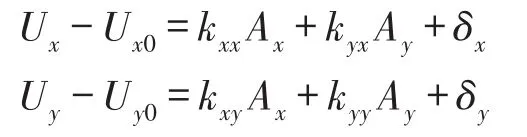
X加计、Y加计敏感轴相互正交放置在XOY平面和XOZ平面上。利用MEMS加速度计的输出特性[3],有:

式中,Ux、Uy;Ux0、Uy0;Ax、Ay分别为X、Y加计输出电压、零位电压(V)和加速度值(m/s2)。
由于系统误差的存在,两加计实际并非相互正交,建立如下融合数学模型:
简化为矩阵形式:

式中,kii为标度因数(V/g),kij为系统误差系数(V/g),δi为输出噪声误差,其中i=x,y;j=x,y。
由于实测数据中的噪声呈均匀分布,平均后可近似为零。对式(5)中标度因数矩阵K求逆,得X,Y轴输出加速度Ax、Ay[4]:
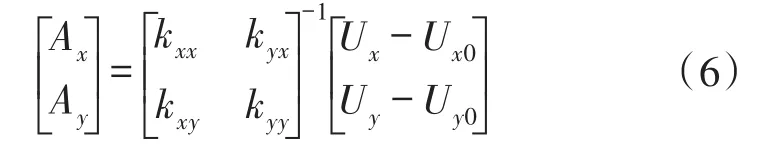
图1中,在测量某一角度时两加计敏感轴变为X′、Y′,与水平面的夹角为α、β,其中
当α=90°或270°时,Ay→0,此时X加计输出Ax,由式(4)可得α表达式为:

图2为绕OX旋转360°时,X、Y轴加计的理想输出的变化曲线[5]。
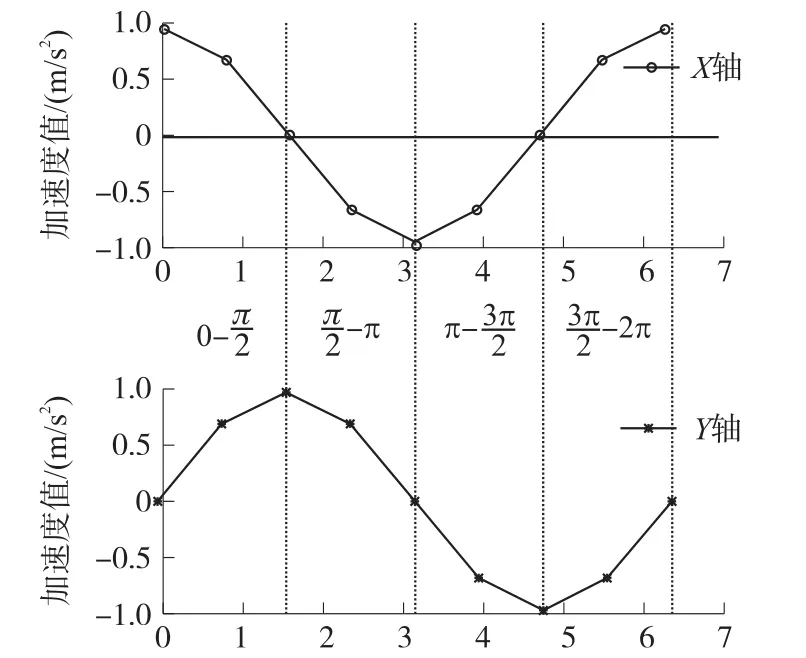
图2 双轴加速度计的理想输出曲线
由图2可知,在[0,2π]范围内通过两MEMS加计输出加速度值的正负,将角度在平面内分为4个象限,从而实现0~360°的测量[6]。
2 硬件电路设计
系统通过采集X、Y加速度计的输出电压信号,经过信号调理电路对加计信号进行低频滤波、信号放大、电压跟随,微控制器通过时序控制A/D转换器对两通道的输出电压进行实时采样,微控制器对转换后的数据进行解算、再将浮点数据编帧后送入上位机进行显示和角度数据的存储;微控制器也可以直接解算数据通过SPI接口在OLED屏上直接显示出所测角度。整体硬件设计框图如图3所示。

图3 测量系统框图
2.1信号调理电路
MEMS加速度计采用SDI公司的1521L系列高稳定性低噪声MEMS加速度计芯片,其内部包含MEMS电容式敏感单元和温度传感器。该加计量程范围选用±2 gn、噪声小于、灵敏度为1 000 mV/gn。
当MEMS加速度计静止放置时,X轴加速度计敏感到1 gn的重力加速度,Y轴加速度计为0 gn。倾角是在重力场下的稳定信号输出,当存在高频信号时,MEMS加速度计的输出就会受到影响,进而导致整个系统测量结果不准确,信号调理电路原理图如图4所示,X、Y加速度计的输出的小信号通过MAX219巴特沃斯低通滤波芯片,滤掉外界多余高频噪声信号,使用OPA344芯片组成放大电路,对小信号进行放大。
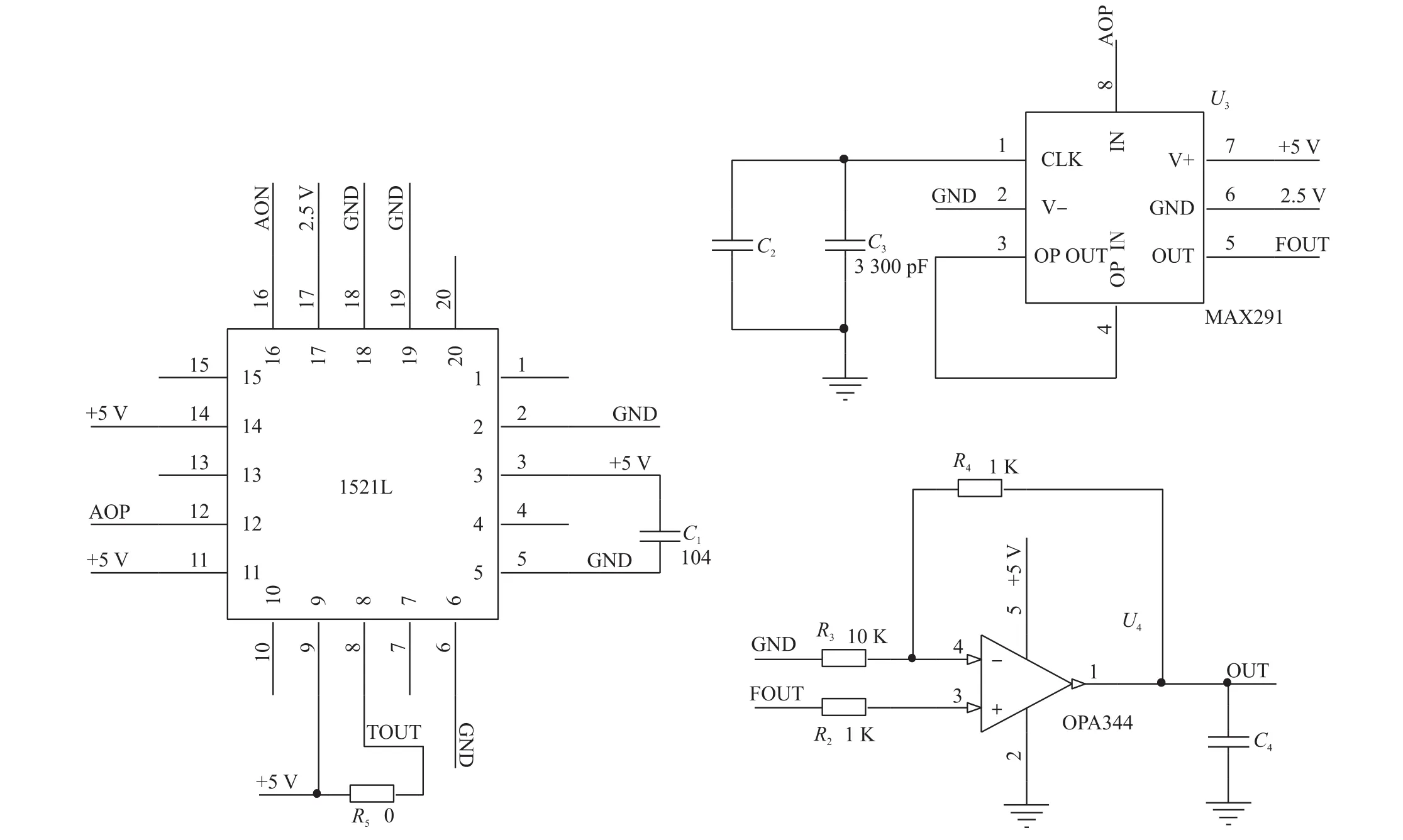
图4 1521L信号调理电路
2.2信号采集电路
微控制器选用TI公司的低功耗单片机MSP340F249,将16 MHz主时钟4分频后给16 bit高速模数转化芯片ADS8365,其转换时间为20个时钟周期,在4 M的时钟频率下,两个通道的总的转换时间为5 μs。在角度测量时,X、Y加速度计输出的电压信号进入OPA4340进行电压跟随并在输入通道口正负输入端之间并联20 pF的小滤波电容进行阻抗匹配。信号采集电路如图5所示。
图5中,A2A1A0为ADS8365地址控制线,采用硬件模式,直接设置地址线A2A1A0=110,此时A/D转换器工作选择为循环模式,即,CS选中后,HOLDA置高,选中A0、A1通道为采样通道。并启动AD转换,等待约16个CLK时钟后,当EOC管脚输出一个低电平,表明一次转换结束,将转换后的结果存入内部寄存器中;控制器判断EOC信号,通过CS置低,选中输出总线后,RD置低,读出采样信息和地址值,第二次RD置低读出低八位数据,第三次RD置低读出高八位数据,通过软件控制循环读取两个通道的AD值[7]。
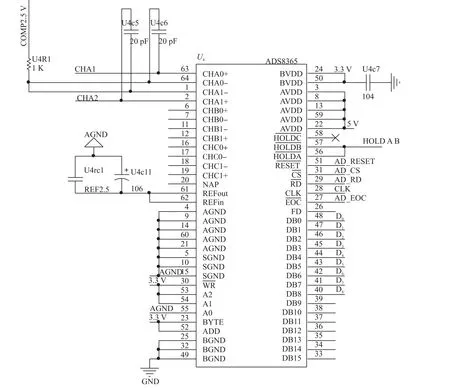
图5 信号采集电路
2.3系统软件设计
系统下位机软件主要是主控制器MSP430F249控制ADS8365对双轴加计输出进行采集,利用滑动滤波将数据初步处理后进行角度解算、将解算角度数据编帧,经过USB转串口发送至上位机软件下一步的数据处理。下位机程序流程框图如图6所示。
上位机软件利用Labview进行编写,通过VISA口配置接收下位机上传浮点数据,系统波特率为115 200 bit/s,8 bit数据位、无奇偶校验位;每一帧数据包括帧头、X轴原始数据、Y轴原始数据、解算角度数据以及检验位。软件通过对数据帧头和数据长度的校验,读取有效数据。如图7所示为测量角度为30°时,上位机界面显示X、Y轴加计输出电压和解算的角度值,并绘制出角度变化曲线。
利用三维图片控件进行3D动画实时显示,能够直观的从上位机软件看到当前所测量的角度大小、变化趋势和三维动画,点击保存按钮将数据存储为TXT文本文件,方便后续的处理[8-9]。
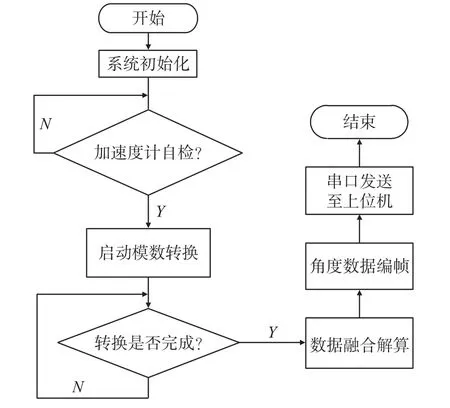
图6 下位机程序流程框图
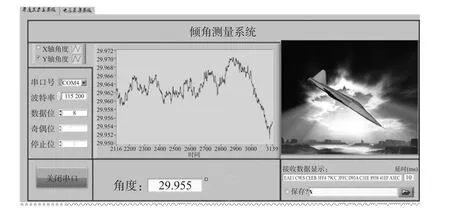
图7 测量30°时上位机显示
3 参数标定及系统验证
如图8所示,利用高精度三轴温控速率转台(位置模式精度为0.001°)对所设计的倾角测量系统进行标定得到所需要的解算参数。
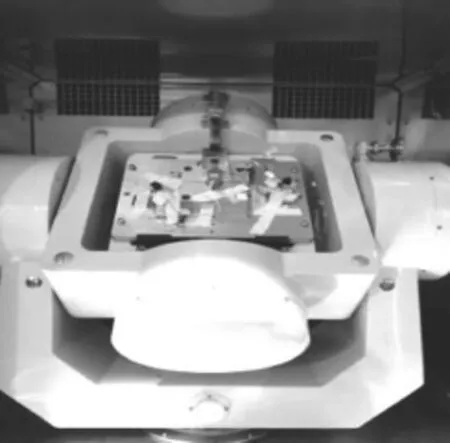
图8 系统验证实验
测量系统安装固定在转台台面上,系统X轴与台面垂直,Y轴与台面平行,控制转台中框在位置模式下进行重力场翻转实验,分别以X、Y轴分别做主轴进行翻转实验,每转15°静止10 s同时对数据进行采集存储,利用Matlab软件对采集的数据进行取点、平均后,一次拟合计算出式(5)中的标度因数矩阵K、两加计零位电压Ux0和Uy0等参数[10],具体如表1所示。
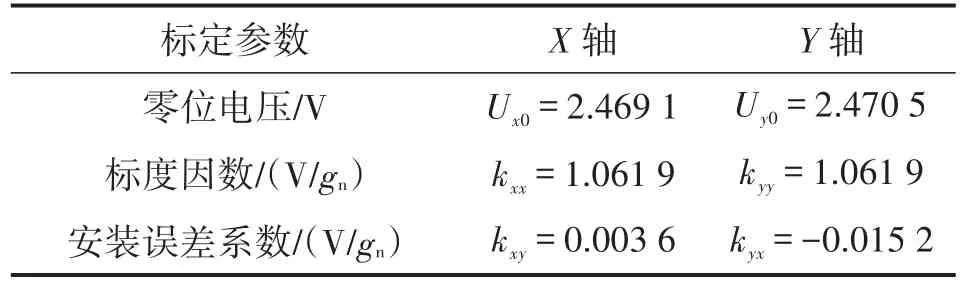
表1 系统标定参数
将表1所拟合的标定参数写入下位机软件,控制中框在0~360°范围内,每转15°静止20 s。将转台所转角度作为标称角度,在上位机软件中保存倾角仪的输出角度与转台的标称角度进行对比,对应的测量角、标称角和误差具体如表2所示。
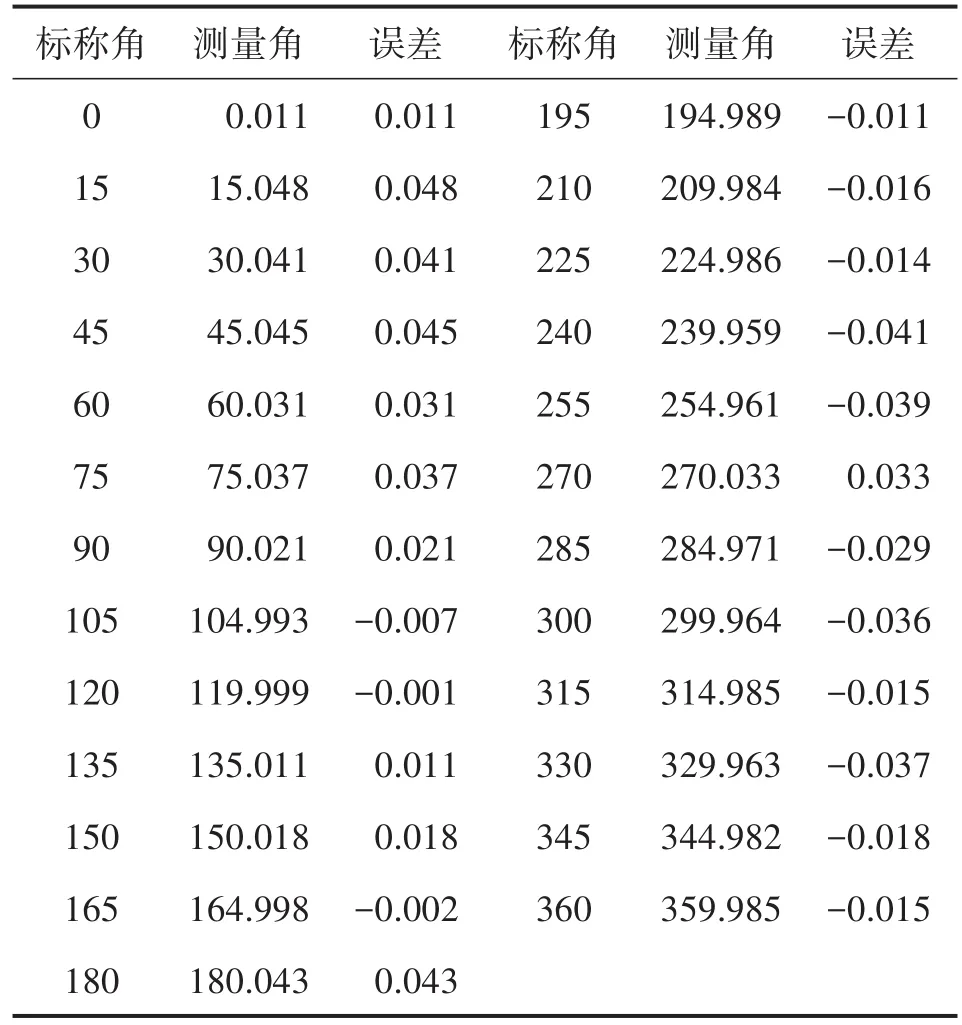
表2 角度测量结果(°)
在不同温度情况下,可以通过温度补偿方法[11],得到加计输出真实值[12]。由图9所示,该测量系统的角度误差为±0.05°。
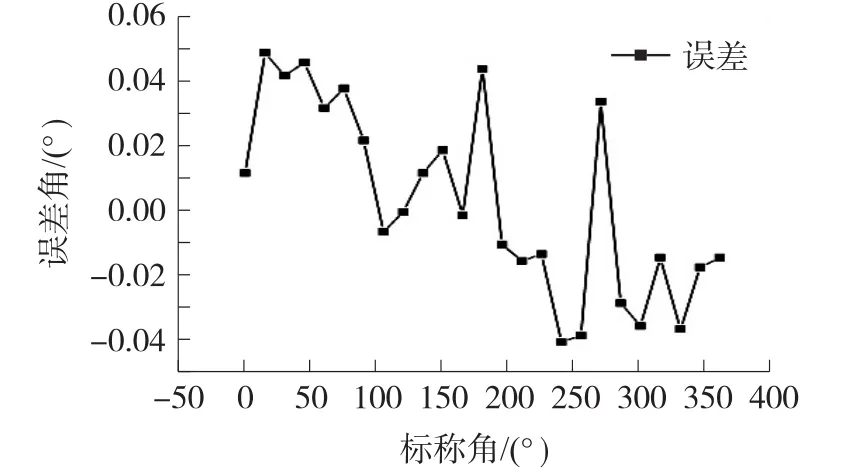
图9 测量角度误差
4 结论
本文提出并设计了一种基于融合模型的倾角测量系统,实现了宽范围内的高精度倾角测量。通过融合模型建立,利用高精度三轴温控速率转台进行系统标定、确定融合模型参数。经实验验证,该系统在0~360°范围内测量精度达到±0.05°,能够满足工程中对宽范围高精度的倾角测量的需求,具有较好的工程应用前景。
[1]沙承贤,李杰,翟成瑞,等.基于MEMS加速度传感器的数字倾角仪设计[J].传感器与微系统,2010,29(6):134-136.
[2]马洪连,郑保重,王伟.基于MEMS技术倾角测量系统设计与实现[J].仪器仪表学报,2005,26(8):185-187.
[3]范成叶,李杰,景增增.旋转弹用三轴加速度计安装位置误差标定补偿技术[J].传感技术学报,2013,26(10):1352-1356.
[4]白渚铨,张晓明,刘俊,等.基于加速度计的数字倾角仪误差建模与分析[J].传感技术学报,2013,26(8):1078-1082.
[5]Li Jie,Liu Jun,Zhang Wendong.MEMS Based Micro Inertial Measurement System[J].Wseas Transactions on Circuits and Systems,2006(5):691-696.
[6]李杰,洪惠惠,张文栋.MEMS微惯性测量组合标定技术研究[J].传感器技术学报,2008,21(7):1170-1173.
[7]李杰,马幸,刘俊,等.小型惯导系统数据实时采集处理与存储设计[J].中国惯性技术学报,2008(3):274-277.
[8]黄豪彩,杨灿军,陈道华,等.基于LabVIEW的深海气密采水器测控系统[J].仪器仪表学报,2011(1):40-45.
[9]郭会军,张建丰,王志林,等.基于LabVIEW和ARM处理器的大型称重式蒸渗仪测控系统[J].农业工程学报,2013,16:134-141.
[10]Shin Eun-Hwam.Estimation Techniques for Low-cost Inertial Navigation[D].Calgary,Alberta:Doctor Dissenation,MAY,2005.
[11]杨录.SD1221加速度传感器的一种温度补偿方法[J].仪表技术与传感器,2009(6):93-94.
[12]张丽杰,常佶.一种MEMS加速度计温度模型辨识及温度补偿方法[J].传感技术学报,2011,24(11):1551-1555.

刘伟(1989-),男,苗族,贵州遵义人,硕士研究生,主要研究方向为智能传感器,微系统集成理论与技术,liuwei6608@ 126.com;
李杰(1976-),男,山西省岚县人,教授,博士生导师,主要研究方向为微系统集成理论与技术,惯性感知与控制技术,组合导航理论,计算几何及智能信息处理等,lijie@nuc.edu.cn。
Design of High Precision Tilt Measurement System Based on Fusion Model*
LIU Wei,LI Ji*,WANG Yihuan
(North University of China Science and Technology on Electronic Test&Measurement Laboratory,Taiyuan 030051,China)
This article is intended for a new solution to deal with problems that is low accuracy of wide measuring range.It’s proposed a high precise angle measurement system based on fusion model.Firstly,we created the fusion model of MEMS accelerometer mechanism by analyzing measurement error,and prepared the calibration program to determine the model parameters,finally,we completed hardware and software design,which can reach 0~360°angle precision measurements.By comparative experiments verification,the designs of the system had advantages in low power consumption,high precision and a wide measurement range,etc.It achieved a wide range of high-precision stable measurement and accuracy up to±0.05°.
MEMS accelerometer;tilt measurement;fusion model;system calibration
TP212.9
A
1004-1699(2016)10-1619-06
项目来源:国家自然科学基金项目(51575500)
2015-12-22修改日期:2016-06-24
猜你喜欢
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
- 传感技术学报的其它文章
- 基于HHT的脑电信号在不同阅读模式下的识别与分类*
- Development and Test of Software Method to Achieve Constant-Temperature-Difference Control for Thermal Wind Sensor*
- Analysis of the Effect of the Equivalent Parallel Resistor of theComb Capacitive Accelerometer*
- 基于球形内检测器的管道内磁场测量*
- 基于恒温谐波检测双回路瓦斯浓度仪研究*
- 炭黑/硅橡胶复合材料力敏元件热、力敏感试验研究*