
高倍聚光太阳能电池板跟踪系统
2016-11-08 01:25:30李训涛
测试技术学报 2016年5期
李训涛,张 明
(南京航空航天大学 航空宇航学院,江苏 南京 210016)
高倍聚光太阳能电池板跟踪系统
李训涛,张明
(南京航空航天大学 航空宇航学院,江苏 南京 210016)
为了解决聚光太阳能电池板需要的高精度、低成本跟踪系统.设计了一种双轴太阳能跟踪系统.该系统由双直流电机、光跟踪传感器、主控与直流电源电路组成.光跟踪传感器可以检测光照强度,修正采用视日运行轨迹跟踪原理计算的误差、机械误差等.跟踪精度可以达到0.1°,从而满足了聚光太阳能电池板的跟踪要求.
高聚光太阳能;太阳能电池板;双轴;光跟踪传感器
0 引 言
目前全球能源危机,发展新能源成为各个国家的首要任务.太阳能作为一种稳定能源,拥有取之不尽的能量,它正在慢慢地渗入到各个领域,相信在不久的将来,太阳能将广泛用于各个行业,有利于缓解全球能源危机及环境污染.就太阳能能源转换效率来讲,除了太阳能电池板的能量转换效率尤为重要外,太阳能电池板是否能够跟踪太阳方位,接收最大的能量亦成为不可忽视的一部分.据可靠计算:当受光方位角度偏于45°以上时,能量将损失50%以上;而对于高倍聚光太阳能发电系统则对跟踪精度有更高的要求,一般要求在0.2°以内甚至更高.目前太阳跟踪设备的结构复杂,开发成本高,限制了其在光伏产业的普及,因此研究应用范围广,跟踪精度高,结构简单,成本低的太阳跟踪系统已迫在眉睫.
高倍聚光太阳能电池板跟踪系统利用太阳能跟踪传感器,不仅能够确定自身方位,而且能够判断太阳方位,并通过主控系统自动调节太阳能电池板方位以求得最大光照,跟踪精度在有光照情况下可以达到0.1°.它是一种完全借助光伏探测器、加速度传感器等设备形成的自动控制技术.拥有成本低、精度高、可靠性高等特点,在太阳能发电产业将会有很大的应用前景.
基于当今太阳能跟踪系统有“V”型、“T”型、“W”型等.本文将主要介绍T型双轴跟踪系统.
1 高倍太阳能聚光

图1 菲涅耳透镜聚光原理图Fig.1 The principle diagram of fresnel lenses
光伏发电经历了第一代晶硅电池和第二代薄膜电池.为了能够得到更高的光电转换效率,第三代太阳能高倍聚光系统逐步进入到实际应用中.太阳能高倍聚光的几何聚光比一般都在120以上,目前的聚光光伏发电系统效率高达40.7%,高倍聚光太阳能发电的光电转换效率将来还具有巨大的提升空间.
太阳能聚光方式大概有反射式、透射式与组合式,所用装置有菲涅耳透镜、碟式反射镜等[1,2],菲涅耳透镜式的原理如图1所示,它将垂直入射的太阳光利用折射原理折射到透镜中心线附近,从而能够提高聚光倍数[3,4].由于聚光电池板一般较小,光斑能不能投射到电池板直接关系到能不能有效实现能量转换.
2 光跟踪传感器
光跟踪传感器主要由四象限光伏探测器、加速度传感器、地磁传感器等组成.
2.1光伏探测器
四象限光伏探测器是重要的功能单元,它是在有光照情况下确定系统跟踪位置的主要传感单元.如图2所示,为入射光强短路电流、开路电压关系,入射光强与短路电流具有很好的直线特性;图3为该器件的输出电压短路电流与光照面积的曲线图(光照强度为50 mW/cm2),可以看出该器件电流输出与光强也具有很好的线性关系;不仅如此,此器件的温度、内阻等特性也很稳定.正是如此,利用它的电流输出可以很容易地检测光强及光偏差.但是由于阳光照射的范围很广,必须将太阳光转换成光斑形式照射到探测器上,跟踪传感器采用透镜成像原理将太阳成像到光探测器上,如图4所示.采用这样的结构不仅可以成像到探测器上,而且可以提高输出灵敏度,从而可以提高控制精度,透镜的实际聚光倍数与透镜的聚光能力与透镜与光伏探测器的距离有关,但又要考虑光斑太小会提高受光面温度,实际的聚焦倍数控制在16倍左右,光斑直径在10 mm.

图2 入射光强与电压电流关系Fig.2 The interactions between incident intensity and voltage-current

图3 光照面积与电压电流关系Fig.3 The interactions between light coverageand voltage-current
四象限光伏探测器由4块性能相同的光伏探测器组成.4个象限在相同光强下能否输出大致相同的电压电流,将直接影响到光跟踪的精度,为了确保跟踪精度采用整块分割技术,即:在一块圆形的光伏探测器上分割出4块面积相同的区域.如图5所示,这4块区域分为上下左右(UDLR)4个象限,电流转换器首先将电流转化为电压,其中上下两块光照强度相减便可以检测光斑的垂直偏差程度(记为LTUD),左右相减可检测光斑的水平偏差程度(记为LTLR),4块光强之和共同检测光照强度(记为LUM),用于判定有无日照.

图4 光探测器模型Fig.4 Light detector mode

图5 光斑位置检测原理图Fig.5 The schematic diagram of the optical spot detection
2.2位置传感器
对于W型太阳能跟踪系统,主要需要两个参数:方位角与俯仰角.传统的方式采用编码器采集角度,编码器一方面价格较高,其次对系统也有很高要求,比如突发断电、编码器线路故障等均会引起系统致命错误.光跟踪传感器不仅可以测量光偏差,而且自身带有加速度传感器与磁阻传感器,只要将传感器安装在太阳能电池板同一个平面上,就可以利用它们测出方位角与俯仰角,简化了系统降低了成本.
为了解决侧倾角对传感器俯仰角的影响,加速度传感器采用三轴±3 g加速度传感器ADXL335,该芯片将3轴加速度传感器集成在一块芯片上,大小只有4*4mm,它将加速度信号转成电压直接输出.为了减小俯仰对地磁信号的影响,地磁阻传感器选用一片双轴磁传感器HMC1052与一片单轴磁传感器HMC1051组成三轴磁阻传感器构成三轴地磁传感器以确定方位角.跟踪传感器总体结构如图6所示,图6中所有传感器信号均以电流或以电压方式输出,经过功放电路转换即可输入到8路10 b AD转换器[5,6],片上系统就可以测出三个方向上的加速度与地磁大小;从而确定传感器与重力加速度及地磁正南的夹角,即可以确定安装面的俯仰角与方位角.传感器光强、光偏差信息、俯仰角与方位角均通过RS485传输至主控系统.

图6 跟踪传感器结构框图Fig.6 Tracking sensor structure diagram
光跟踪传感器不仅可以提高太阳光跟踪精度,还可以确定自身的俯仰角及方位角;结构小巧,功能丰富,大大简化了整个系统的结构,提高了稳定性.
3 主控系统
主控系统主要包括主控板与电源控制板.
3.1主控电路

图7 主控结构框图Fig.7 Main control structure diagram
主控电路的主要功能有:与光跟踪传感器通讯获取光及位置信息等;提供精确时钟,及由时间得出太阳高度角与方位角;输出控制信息,控制电机动作等,详细功能如图7所示:时钟电路可以提供实时年月日时分秒,系统显示的为北京时间,而实际在计算太阳角度的时候用到的是当地时间,下文中提及的时间为当地时间;不仅如此,时钟的精度对系统也尤为重要,为了能够提供稳定的高精度时间,这里采用了高精度时钟芯片与晶振,实际精度可以控制在每月5 s的变化量,而且系统可以根据太阳光上下午太阳高度角一致原则自动校准时间,但是必须同时在光控控制下达到相同的角度;ARM处理器利用时间与地理经纬度即可以计算出太阳的实际方位角与高度角,方位角与高度角计算公式为[7]
sinH=sinδsinφ+cosδcosφcosω,
(1)

(2)
式中:H为太阳高度角;A为太阳方位角(太阳方位角为太阳方位与正南方的夹角,上午时,角度为负角);δ为太阳赤纬;φ为观测点的地理纬度;ω为太阳时角.计算出的太阳方位角与高度角决定启动与关闭跟踪系统、定位太阳能板大致位置,由于依靠机械结构无法调整到很高的精度,产生的误差将由光跟踪传感器进行修正.
主控电路还包含有两路RS485通讯端口,一个端口接收光跟踪传感器信息,得到垂直光偏与水平光偏,系统将自动调整方位以确保垂直光偏与水平光偏控制在一定范围以内;另一个端口可以输出目前的时间、太阳高度角、方位角等信息;也可用于校准时间、输入经纬度与更改光强阈值等;还可以拓展将多台控制系统与控制中心计算机连接组成大型发电场控制网络,以便集中控制与监控.
输入光电隔离部分可以接收外部限位传感器信息或者编码器信息,输出光电部分主要为输出控制驱动电机信号,例如:电机电源开关、电机转动方向等.键盘与显示部分主要是为了添加人机操作功能,通过按键与显示可以输入地理经纬度、时间、光强阈值及光差阈值等;在系统触发工作后,还可以显示目前太阳能板俯仰角与方位角等.
3.2电源控制
为了能够兼容交流与直流电机,电源控制电路与主控电路分开,且采用光电隔离技术,这样即可以减少电机开关对主控电路的影响,又可以提高兼容性,适用于大小功率的直流或交流电机.无需编码器或步进电机,从而简化系统结构,降低成本.
4 跟踪传动装置
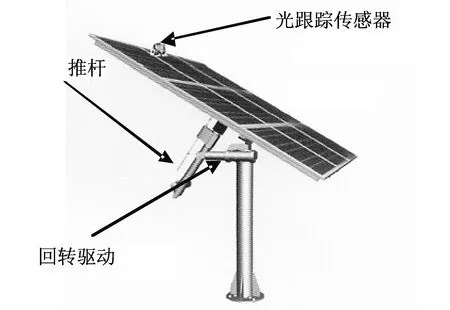
图8 “T”型太阳能跟踪装置Fig.8 Solar Tracker for T-type
“T”型太阳能跟踪系统传动装置主要包括回转驱动、垂直推杆与其他附属装置,如图8所示.其中回转驱动用于调整水平方位角,垂直推杆用于调整太阳能电池板俯仰角,俯仰角为太阳能电池板与地面的夹角,角度范围为0°~70°,对应的太阳高度角为90°~20°.对于处于北回归线以南的地区,采用强制顺时钟方式调整方位角,然后利用光跟踪传感器微调俯仰角.对于不同功率的太阳能电池板,所用的回转驱动与推杆也不同,为了防止意外情况,推杆的上下两端分别有限位传感器,防止推杆上下脱位;回转驱动也有限位传感器,根据我国太阳方位角的最大范围,设置为东偏北20°与西偏北20°[8,9].
整个太阳能系统信号传输均采用数字信号传输,确保数据的可靠性.对于出现的意外情况,例如:光控传感器通讯错误,则采用CRC校验确定数据的正确性,如果出现异常,将关闭系统并在显示模块显示相关错误代码.
5 实验结果
实验结果选择理论公式计算作为真值,跟踪传感器输出角度作为比较值,光偏差作为参考值.由于角度传感器(方位角)输出精度只有1°,仰角只精确到0.1°,因此利用理论值控制角度无法实现高精度控制.实际实验效果以500 mm长标杆影长作为有光照时的跟踪精度参考.如表1为一天内光照良好的一组数据.
由实验结果可以得出:高倍太阳能跟踪系统能够有效地提升跟踪精度,精度范围在0.1°范围内.具体的误差因素有:① 传动机构与框架与地面的平行度对跟踪精度的影响;② 聚光装置与探测传感器不在同一平面引起的误差;③ 光伏探测器的分散性引起的误差.

表1 实验结果
6 结 论
高倍聚光太阳能电池板跟踪系统利用光伏探测器修正跟踪精度,此结构采样与高倍聚光太阳能板结构相似,不仅可以实现很高的控制精度,而且降低了成本;不仅适用于聚光太阳能电池板,普通太阳能板也同样适用;人机界面方便信息的输入与状态的读取;预留的通讯端口不仅可以监视工作状态还可以实现远程控制,以便形成大型监控网络.但是,由于传动机构的T型结构影响,俯仰角与方位角有一定的工作范围,无法实现太阳高度角较小时的跟踪;对此,可以将此控制系统用于其他结构的跟踪传动装置以解决这个问题.
[1]Naito H,Kohsaka Y,Cooke D,et al.Development of a solar receiver for a high efficiency thermionic/ thermoelectric conversion system[J].Solar Energy,1996,58 (4-6):191-195.
[2]Omera A,Siddig D,Infield David G.Design and thermal analysis of a two-stage solar concentrator for combined heat and thermoelectric power generation[J].Energy Conversion & Management,2000,41 (7):737-756.
[3]韩延民,王如竹,代彦军,等.太阳能高倍聚光能量利用系统热力学分析及传输过程设计优化[J].工程热物理学报,2007,28(1):1-4.
Han Yanmin,Wang Ruzhu,Dai Yanjun,et al.Thermodynamic analysis for a solar energy utilization system with high concentration ratio and optimal design on its transmission process[J].Journal of Engineering Thermophysics,2007,28(1):1-4.(in Chinese)
[4]韩延民,代彦军,王如竹.太阳能高倍聚光的方案优化及装置构建[J].上海交通大学学报,1999,20(1):72-74.
Han Yanmin,Dai Yanjun,Wang Ruzhu.Schemes optimization and device conformation of high concentrating solar energy[J].Journal of Shanghai Jiaotong University,1999,20(1):72-74.(in Chinese)
[5]张明,李训涛.计算机测控技术(第二版)[M].北京:国防工业出版社,2010.
[6]张明,马涛,李训涛.51系列片上系统-LPC900系列单片机[M].北京:国防工业出版社,2009.
[7]贺晓雷.太阳方位角的公式求解及其应用[J].太阳能学报,2008,29(1):69-72.
He Liaolei,Yu Hejun,Li Jiangying,et al.An engineering formula solution for the solar azimuth and its application[J].Acta Energiae Solaris Sinica,2008,29(1):69-72.(in Chinese)
[8]杨春勇,倪文军.双轴光伏动态跟踪控制系统的设计与实现[J].中南民族大学学报,2013.32(4):261-265.
Yang Chunyong.Ni Wenjun.Design and implementation of two-axis control system for photovoltaic dynamic tracking[J].Journal of South-Central University for Nationalities(Natural Science Edition),2013,32(4):261-265.(in Chinese)
[9]饶鹏,孙胜利,叶虎勇.两维程控太阳跟踪器控制系统的研制[J].控制工程,2004,11(6):542-545.
Rao Peng.Sun Shengli.Ye Huyong.Development of control system of two-axis automatic solar-tracker[J].Control Engineering of China,2004,11(6):542-545.(in Chinese)
The Tracking System of HCPV Solar Panel
LI Xuntao,ZHANG Ming
(College of Aerospace Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
To meet the demands of high accuracy and low cost on the condensation solar energy photovoltaic panel and tracking system,this paper introduced a two-axis tracking system of HCPV,which based on double DC Motor,spotlight tracking sensor,main control and DC power circuit .The spotlight tracking sensor can detect the illumination strength and correct he errors of calculate and mechanical y the Principle of the solar running track.The tracking accuracy has reached 0.1 degree,so it completely meets the requirements of the HCPV.
HCPV;solar panel; two-axis; spotlight tracking sensor
1671-7449(2016)05-0432-06
2016-01-19
江苏高校优势学科建设工程资助项目
李训涛(1983-),男,实验师,硕士,主要从事测试技朮与传感器研究.
TP212.6
Adoi:10.3969/j.issn.1671-7449.2016.05.012
猜你喜欢
军事文摘(2021年18期)2021-12-02 01:28:16
新能源科技(2021年8期)2021-04-02 19:39:55
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
文萃报·周二版(2019年48期)2019-09-10 20:13:36
中学生数理化·八年级物理人教版(2018年12期)2019-01-31 02:38:22
知识就是力量(2017年12期)2018-01-15 10:57:23
电源技术(2016年9期)2016-02-27 09:05:31
河南科技(2015年18期)2015-11-25 08:50:14
电源技术(2015年2期)2015-08-22 11:28:04
