基于精密单点定位技术的远程GPS验潮
2016-11-07 05:43:17李圳章传银单瑞路媛琦
全球定位系统 2016年4期
李圳,章传银,单瑞,路媛琦
(1.山东科技大学 测绘科学与工程学院,青岛 266510;2.中国测绘科学研究院,北京 100830;3.国土资源部海洋油气资源与环境地质重点实验室,青岛 266071;4.青岛海洋地质研究所,青岛 266071)
基于精密单点定位技术的远程GPS验潮
李圳1,2,章传银2,单瑞3,4,路媛琦1,2
(1.山东科技大学 测绘科学与工程学院,青岛 266510;2.中国测绘科学研究院,北京 100830;3.国土资源部海洋油气资源与环境地质重点实验室,青岛 266071;4.青岛海洋地质研究所,青岛 266071)
精密单点定位(PPP)技术应用于远程海水验潮,可有效弥补传统验潮方法受距离限制等缺点。本文将单天的IGS观测数据基于Bernese软件进行了单历元PPP解算,探讨了PPP应用于海水验潮的有效性。并采用门限滤波方法提取潮汐信息,通过分析模拟潮位数据及西沙实测数据的内符合精度证明,PPP验潮能够达到厘米级的精度。
精密单点定位;精度;潮汐观测;门限滤波
0 引 言
沿海地区是人类进行生产生活活动最频繁的区域,然而在这一地带潮汐现象显著地影响着人们的生活,例如,沿海地区的农田排灌,围海造田,水产养殖,潮能发电,航行筑港等,与潮汐的涨落有着密切的联系,因而,潮汐十分具有研究意义[1]。
传统潮位获取方法有修建验潮站、抛投压力式验潮仪或根据潮位模型推算得到,但它们都受成本过高或精度不够等缺点的制约[2]。而PPP验潮是近几年兴起的潮位测量方法,已经有相当数量的学者做了相关研究。冯义楷等分析了影响GPS验潮精度的各种因素,提出了基于PPP技术的远程潮汐测量[3];范士杰等进行了海上船载PPP验潮试验,并借助自主研制的PPP软件,取得了良好的验潮数据[4]。此外,国内外学者对动态PPP定位精度及其在海水验潮中的应用均进行了相关研究[5-7]。
本文研究了基于Bernese软件的单历元PPP解算精度,并将门限滤波应用于PPP验潮,从内符合精度上验证了其可行性。
1 PPP验潮
1.1单历元精密单点定位观测方程
由于潮位是实时变化着的,要想获得某一瞬间的潮位数据,就需要逐历元解算GPS观测数据。在单历元情况下,由于受到更多的误差影响,使得定位精度有所下降[8],精密单点定位通常使用载波相位观测值,其线性化后的观测方程为
λφi=-liVx-miVy-niVz-cVtR-λNi+
(1)

1.2基于PPP的验潮模型
GPS定位技术的发展,给PPP应用于海水验潮提供了可能性,PPP验潮可以有效弥补传统验潮方法受距离限制等缺陷。PPP验潮的基本流程及原理如图1、图2所示。
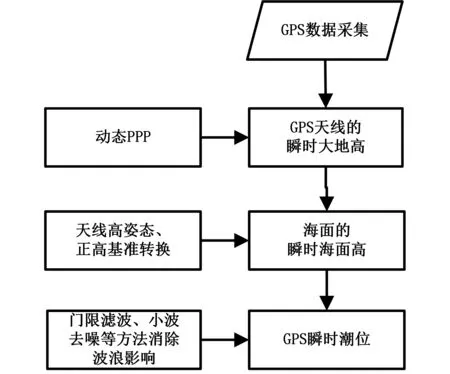
图1 PPP验潮的流程图
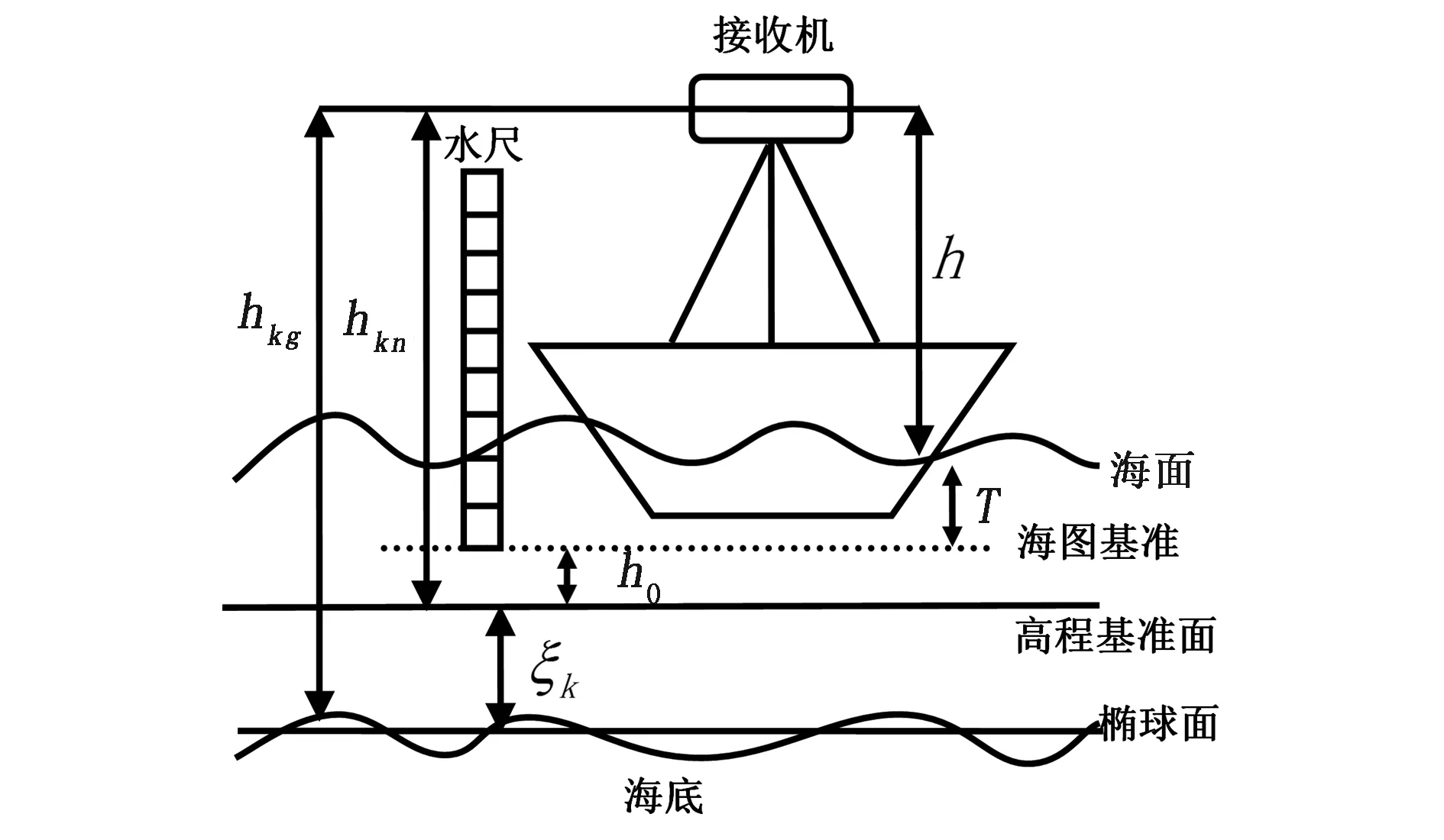
图2 PPP验潮方法原理图
载体上安放接收机,其正常高和大地高分别为hkm、hkg,h为接收机天线高。潮位通常以海图高来描述,因而需要对高程基准进行转换,则流动站的瞬时潮位为
T=hkm-h-h0=hkg-ξk-h-h0,
(2)
式中:h0为水尺零点高程,通常借助潮汐表获取;ξk为高程异常。
由于受波浪影响,载体姿态也会随之发生相应改变,从而对PPP验潮获取的数据产生一定影响[11]。GPS测量大地高,它所测得的瞬时海面并不代表实际潮位面T(t),为此需要进行门限滤波,用以消除波浪ω的影响如图3所示。
不考虑其他因素影响,瞬时海面Ts可看作由潮汐T和波浪ω组成,表达式为
Ts=T(t)+ω(t) ,
(3)
(4)
G(V0i+ui)-gi) ,
(5)
式中:ai,bi为波浪i在正交方向上的分振幅; ϖi为波浪i的周期;MSL0为长期平均水位高度;fi为分潮i的交点因子;Hi为分潮i的平均振幅;qi为分潮i的角速率;V0i为分潮i的格林尼治零时天文初相角;ui为分潮i点订正角;gi为分潮的区时专用迟角。
由于波浪的涌动,载体发生变化,其影响较大,根据式(5),潮位周期一般大于1 h;涌浪周期一般为1~30 s.两项的周期变化如图4所示。对式(3)两边在[0,Δt]区间取积分平均:

(6)
图4说明,只要选择适当的Δt,便可以实现涌浪的滤除。

图3 涌浪影响示意图
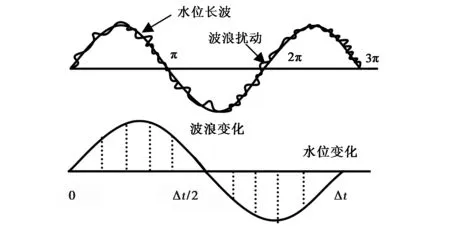
图4 水位及波浪周期示意图
2 实验与精度分析
2.1单历元精密单点定位精度分析
由于本文的研究重点是PPP在海水验潮中的应用,此时载体是不断运动变化着的,探讨的是接收机在某一时间的瞬时位置,故采用了单历元解算模式,分析了动态PPP的定位精度。
为了验证单历元精密单点定位精度,本文选取了位于中国境内的TNML(新竹)IGS跟踪站2015年3月5日的观测数据,并结合IGS提供的精密星历、钟差等,基于Bernese5.0软件对数据进行了单历元解算,其中测站单历元解与全天解坐标之差的统计结果如表1所示,N、E、U三个坐标分量相对于全天所有历元解算结果平均值的偏差如图5所示。
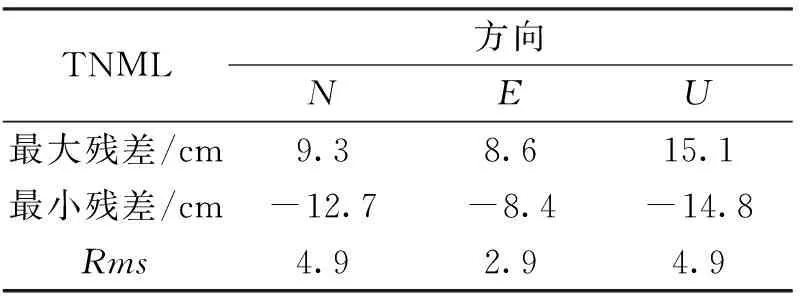
表1 测站单历元解与全天解坐标之差的统计结果
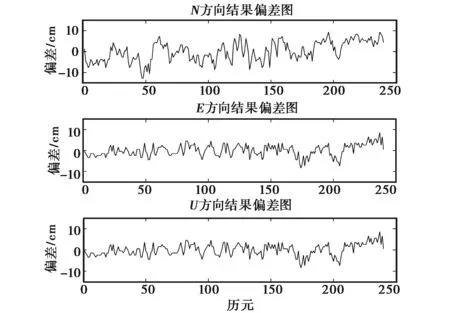
图5 N、E、U方向上测站单历元解结果偏差图
根据表1和图5中可以看出,动态PPP在N、E、U三个坐标分量上的精度基本均匀,TNML测站的单历元PPP定位精度为5.7 cm,其中,高程方向上精度优于5 cm,据此可知单历元PPP的解算结果略低于GPS RTK技术的精度。但单历元PPP只需要一台接收机,无需进行数据差分,且其精度均匀,所以将单历元PPP应用于海水验潮,特别是远离大陆的远程海水验潮是切实可行的。
2.2模拟潮位数据的构造设计与门限滤波处理
由于潮位数据主要由潮汐和波浪及其他一些噪声组成,所以本文设潮位数据由两个周期分别为12 h和6 h的潮位,周期为15 s的波浪和其他各种环境影响造成的服从(0,0.1)分布的随机噪声组成,则潮位可用下式表示:
f1(t)=10×sin[2π/(3600×12)×t+π/3],
(7)
f2(t)=5×sin[2π/(3600×6)×t+π/6],
(8)
fw=0.5×sin(2π/15×t),
(9)
fh(t)=0.1×N(0,1),
(10)
f(t)=f1(t)+f2(t)+fw(t)+fh(t),
(11)
其中: f1、f2为潮汐函数; fw为波浪函数; fh为噪声。
本文基于MATLAB,根据式(7)~式(11)构建了模拟潮位数据f(t),对f(t)共采样了1 024个数据,采样频率为1 Hz,结果如图6所示。为验证门限滤波效果,通过编程实现了模拟数据的门限滤波,绘制了滤波后的潮位变化曲线和理论潮位变化曲线,其结果分别如图7、图8所示,表2示出了两者之间差值的统计结果。
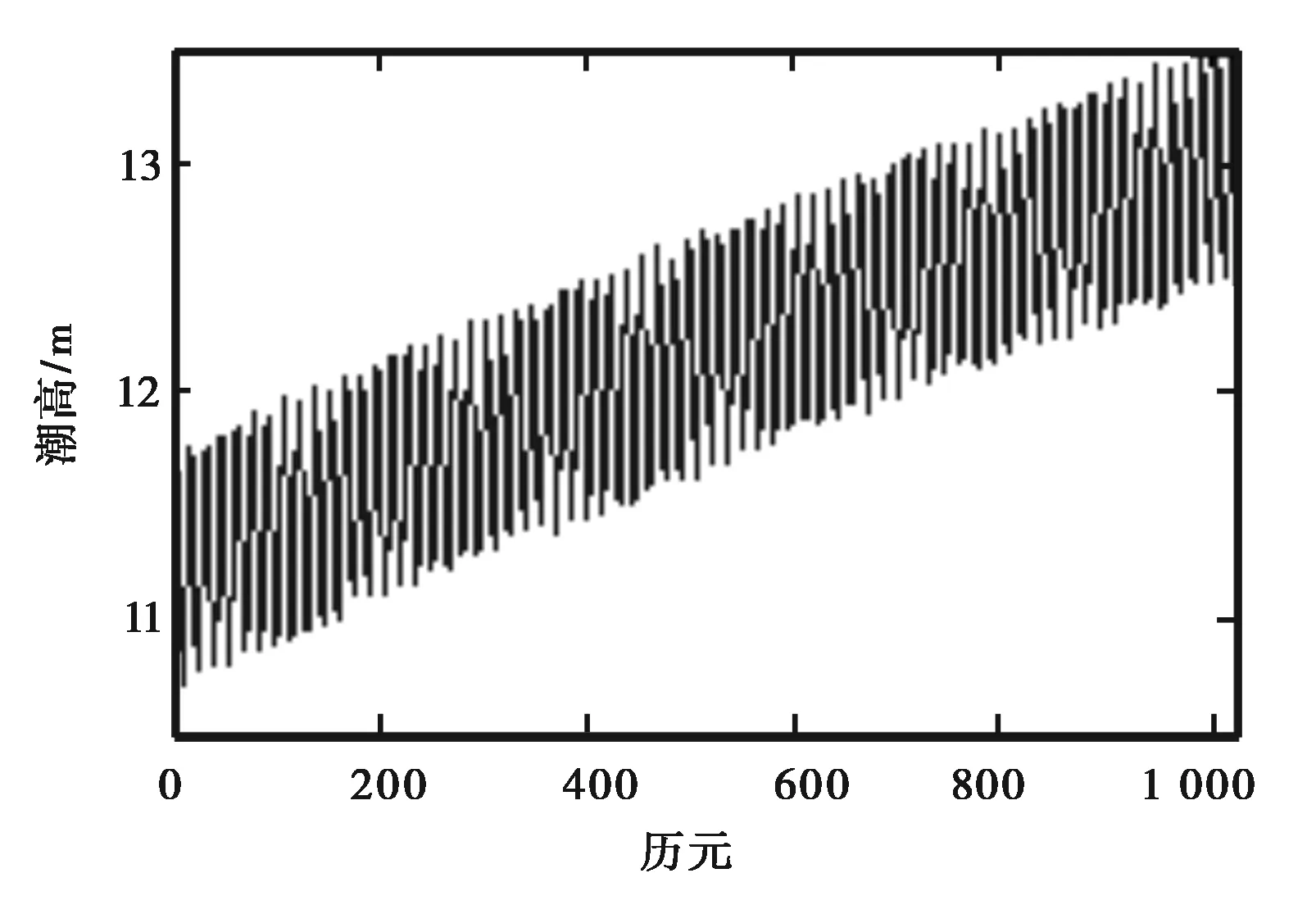
图6 模拟潮位数据f(t)
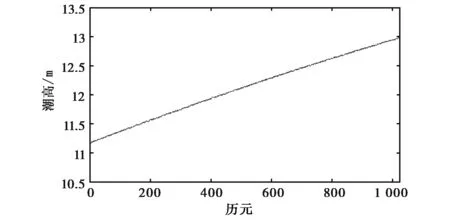
图7 门限滤波处理后的模拟潮位数据

图8 理论潮位数据

参数Max/mMin/mMean/mRms/m差值大小0.1536-0.17850.01730.0510
通过对图7和图8的对比可以发现,门限滤波很好的过滤了干扰。由表2可知,滤波结果与理论潮位值的标准差为5.1 cm,平均差异为1.7 cm,这反映了在滤波过程中对波浪的干扰滤除作用较好。
2.3PPP验潮实验
本文利用3台GPS浮标观测装置,于2014年5月,在我国西沙群岛某岛屿附近同一海域使用三台接收机进行了同步PPP验潮实验,采样间隔为60 s,浮标相对位置关系如图9所示。
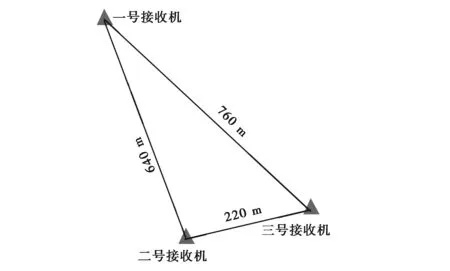
图9 浮标相对位置关系示意图
考虑浮标较容易受海面异常状态的影响,故先对原始验潮数据进行了粗差剔除,粗差的剔除主要依靠设置阈值实现,阈值如果过大则粗差探测不灵敏,剔除不干净,如果过小则可能会剔除一些比较干净的数据,因此应当反复实验获得一个恰当的阈值。在剔除粗差后,为了减小波浪影响,对潮位数据进行了门限滤波。在数据预处理工作完成之后,由于点云数据不易观察分析,故采用了八阶高斯拟合处理。
此外,三号接收机在150~250历元的高程有异常现象,出现了15 cm左右的系统误差,此处应当为浮标锚定不稳造成的。为了分析该误差,对100~300历元间的验潮数据进行了相邻历元作差,其结果如图10所示。

图10 相邻历元作差结果
从图中可以看出,该浮标在155历元和250历元附近发生了15 cm左右的较大变化,但在155至250历元之间浮标的变化却较为平稳。这说明了浮标在155历元时因外力影响使锚定异常,在250历元时及时发现并修复,从而使得这一期间的测量数据出现了误差,故在分析时将这一时段的潮位数据减小了15 cm.原始潮位数据及预处理后验潮数据的拟合曲线如图11所示。

图11 三台仪器所观测的原始潮位数据及预处理后拟合曲线(a)一号接收机; (b)二号接收机; (c)三号接收机
验潮数据经过预处理后,得到比较干净的观测值,之后将观测时间同步,三台接收机所得潮位变化值如图12所示。可以从图中看出,三台仪器所测量的涨潮时间、落潮时间与潮差基本相同,潮位变化相当一致,将三台仪器测量的潮高均值作为真值,研究每一历元的潮高,分析其内符合精度,则各仪器与真值的历元之差间统计结果如表3所示。
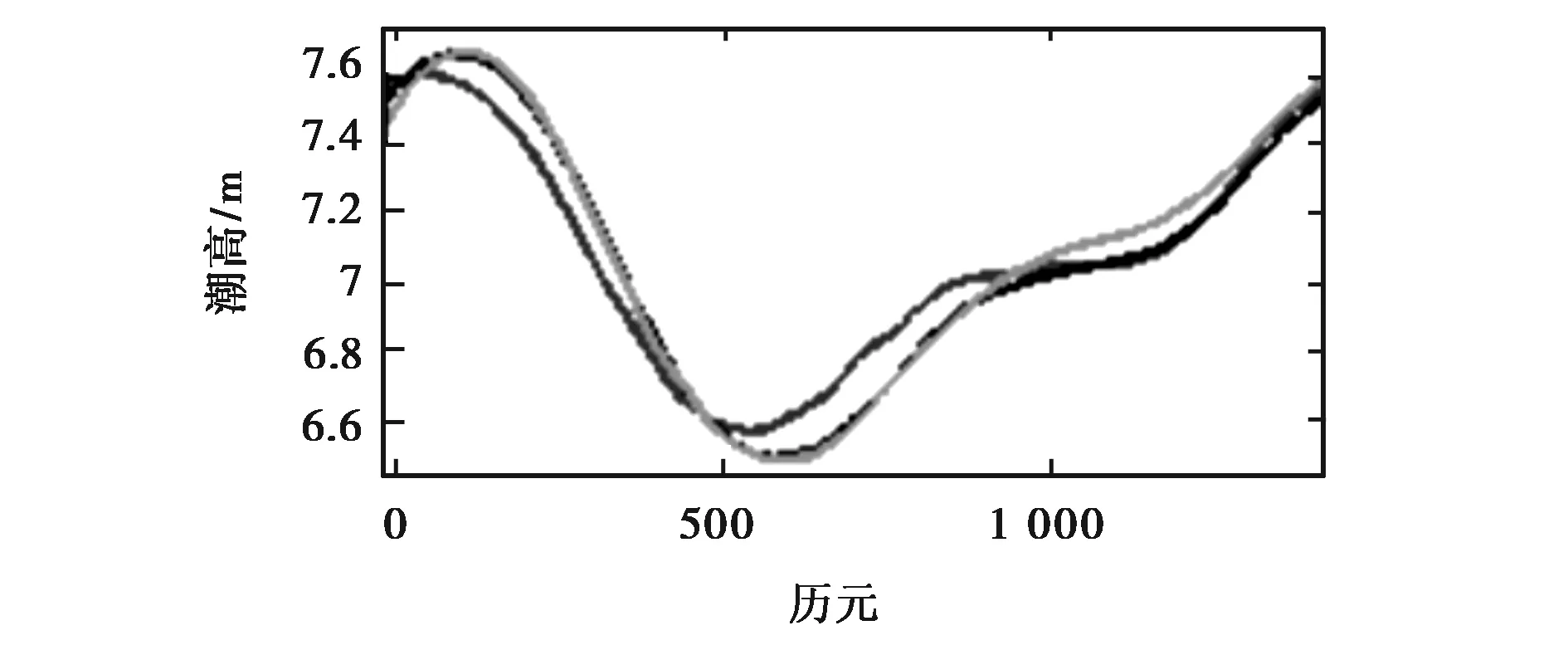
图12 三台接收机所测潮位变化值
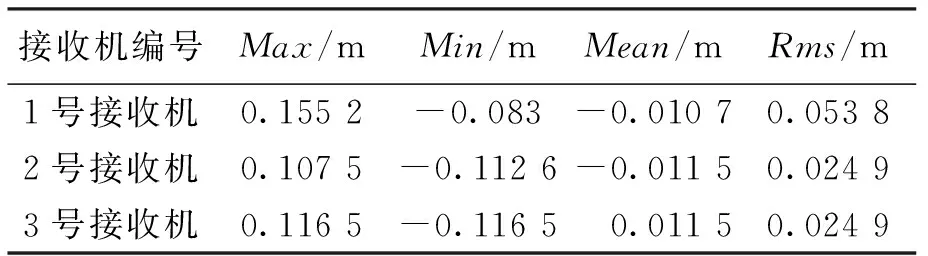
表3 各接收机与真值的历元之差间统计结果表
可以看出,三台仪器的潮高数据内符合精度很好,其平均偏差仅有1 cm左右,均方根在6 cm之内,但第一台接收机测得数据的RMS值较大,这在图13中也可以比较清晰的看出其潮高与其他两组数据相比有明显的差异,在高潮和低潮阶段更加明显,这应该与浮标分布的不同海域潮汐存在微小差异有关。
3 结束语
本文研究了单历元PPP应用于海水验潮的可能性,并将门限滤波应用于验潮数据分析,于西沙群岛某海域进行了相关实验,得出了如下结论:
1) Bernese软件解算测站单历元解的精度在平面上优于6 cm,高程方向上优于5 cm,略低于GPS RTK的定位精度,但是其点位误差不受距离变化的影响,也无需陆地基站提供差分信号。
2) 门限滤波对数学函数构造的模拟潮位数据起到了较好去噪作用,研究西沙实验数据进行粗差剔除与门限滤波之后的结果发现,其内符合精度很高,平均偏差仅有1 cm左右,均方根在6 cm之内。
综上所述,利用单历元PPP定位技术,并通过相关的数据处理之后进行海水验潮可以达到厘米级的精度,与现在广泛采用的GPS RTK验潮技术所达到的精度基本相同。但PPP的优势在于其不依赖陆地基准站,精度均匀,因而PPP应用于远程海水验潮具有一定的实用价值。
[1] 汪连贺.基于GPS PPK技术的远距离高精度验潮方法研究[J].海洋测绘,2014,34(4):24-27.
[2] 赵建虎.现代海洋测绘[M]. 武汉:武汉大学出版社, 2007.
[3] 冯义楷,李杰,杨龙,等.远程GPS验潮方法研究[J].海洋测绘,2010,30(1):4-6.
[4] 范士杰,秦学彬,吴绍玉,等.不同星历和钟差产品的PPP验潮试验及结果分析[J].海洋测绘,2014,34(4):43-46.
[5] MUELLERSCHOEN R J,BERTIGER W I,LOUGH M,etal. An internet-based global differential GPS system,initial result [C]//Proceedings of ION GPS 2000,Salt Lake City: UT, September,2000.
[6] 张小红,李星星,郭斐,等.GPS单频精密单点定位软件实现与精度分析[J].武汉大学学报(信息科学版),2008,33(8):783-787.
[7] 程世来,张小红.基于PPP技术的GPS浮标海啸预警模拟研究[J].武汉大学学报(信息科学版),2007,32(9):764-766.
[8] 胡艳,胡剑.GPS单历元精密单点定位精度分析[J].山东科技大学学报(自然科学版),2013,32(1):74-78.
[9] 李征航,黄劲松.GPS测量测量与数据处理[M].武汉:武汉大学出版社,2013.
[10]李施佳,蔡昌盛,李佳霖,等.对流层投影函数对精密单点定位精度的影响分析[J].全球定位系统,2013,38(5):22-26.
[11]阳凡林,赵建虎.GPS验潮中波浪的误差分析和消除[J].海洋测绘,2003,23(3):1-4.
Remote GPS Tide Observing Method Based on the Precise Point Positioning
LI Zhen1,2,ZHANG Chuanyin2,SHAN Rui3,4,LU Yuanqi1,2
(1.CollegeofGeomatics,ShandongUniversityofScienceandTechnology,Qingdao266510,China; 2.ChineseAcademyofSurveyingandMapping,Beijing100830,China; 3.KeyLaboratoryofMarineHydrocarbonResourcesandEnvironmentalGeology,Qingdao266071,China; 4.MinistryofLandandResources,QingdaoInstituteofMarineGeology,Qingdao266071,China)
The precise point position (PPP) technology is applied to the remote tide observing, which can effectively make up the disadvantage of traditional tidal methods limited by the distance. The paper makes the single epoch PPP calculation for the observation data of single IGS based on Bernese software to discuss the feasibility of PPP applied on the tide observing. PPP tide observing can achieve centimeter level accuracy by the tide information extracted from threshold filtering method and analyzing the analysis of simulated tidal data and the inner precision demonstration of Xisha measured data.
Precise Point Position; accuracy; tide observing; threshold filtering
10.13442/j.gnss.1008-9268.2016.04.012
2016-03-07
国家自然科学基金(批准号:41406115)
P228.4
A
1008-9268(2016)04-0053-06
李圳(1993-),男,硕士生,研究方向为空间大地测量学。
章传银(1968-),男,研究员,主要从事地球重力场与大地测量学研究。
单瑞(1985-),男,助理研究员,主要从事海洋测绘研究。
路媛琦(1992-),女,山东青岛人,硕士生,研究方向为卫星定位与导航。
联系人: 李圳 E-mail: sdkjlizhen@163.com
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07 12:57:26
河北地质(2021年1期)2021-07-21 08:16:12
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
水利水电快报(2019年2期)2019-03-08 09:56:22
水利规划与设计(2017年6期)2017-07-18 10:56:27
World Journal of Integrated Traditional and Western Medicine(2017年3期)2017-03-10 18:18:16
山东工业技术(2016年15期)2016-12-01 05:31:14
World Journal of Integrated Traditional and Western Medicine(2016年4期)2016-03-28 02:08:04
World Journal of Integrated Traditional and Western Medicine(2016年2期)2016-03-14 23:06:38