
一种不规则虹膜的预处理方法
2016-11-05 08:22彭丽娟李建良
湖南理工学院学报(自然科学版) 2016年3期
彭丽娟, 李建良
(南京理工大学 理学院, 南京 210094)
一种不规则虹膜的预处理方法
彭丽娟, 李建良
(南京理工大学 理学院, 南京 210094)
根据虹膜近似圆形但非圆的特点, 给出了一种虹膜内边界不规则的定位方法, 利用贝塞尔曲线精确定位. 再根据虹膜内外边界之间的耦合关系提出一种由粗到精的方法来进行外边界快速定位. 最后针对定位出的虹膜常常存在眼脸的干扰, 提出了一种用改进的canny算子结合最小二乘法进行眼脸定位的方法. 最终实验结果表明: 该方法有较高的定位准确度, 虹膜内边界定位更接近真实边界, 明显改善了定位准确率及效率.
虹膜定位; 眼脸定位; 贝塞尔曲线; 改进的canny算子; 最小二乘法
引言
在生物认证领域中, 以虹膜为特征的身份识别系统扮演了非常重要的角色, 虹膜定位则是虹膜识别技术中耗时最长且最为关键的环节. 然而虹膜定位的准确率及速度对整个认证系统的可行性和鲁棒性有直接的影响[1].
目前, 虹膜内外边缘典型的定位算法有: Wildes 的Hough算法[2]及Daugman 的圆周差分法[1], 这两种方法有较高的定位准确率, 但定位速度比较慢, 计算效率低. 后人在此基础上不断地进行改进[3,4], 但上述方法都是以虹膜为圆形来进行定位, 而虹膜是内外两个近似圆形边界之间的部分, 特别是瞳孔边界旁边有较为丰富的纹理信息, 在许多情况下已不再属于圆形范畴[5]. 因此, 上述方法在定位精度上仍存在一定的误差.
为解决上述提到的问题, 本文提出了一种非圆形的虹膜定位算法. 首先, 定位出原始图像的反射光斑,消除其对虹膜定位的影响, 再定位瞳孔边界, 最后利用贝赛尔曲线拟合, 实现了虹膜内边界的精确定位.虹膜外边界附近的纹理信息较少, 则对其采用改进的Daugman算法由粗到精进行定位. 针对传统眼脸定位方法[1]的局限性, 首先利用改进的canny算子提取边缘, 再利用最小二乘法抛物线拟合检测眼脸. 实验表明, 虹膜与眼脸定位的精确度和效率都得到了有效的提高.
1 虹膜定位
本文提出的算法包含以下几个部分: 消除反射光斑, 瞳孔边界先粗定位后精定位, 虹膜外边界先粗定位后精确定位.
1.1消除反射光斑
一般来说, 人的眼睛包含黑暗(如: 瞳孔, 睫毛)和明亮的强度区域(如: 巩膜, 镜面反射, 皮肤区域). Ma等[4]采用灰度投影结合Hough 变换的方法, 虽然 Hough 变换的搜索范围减少了, 如图1(c)所示, 但当瞳孔存在较多的反射光斑时, 定位往往不理想. 因此, 消除反射光斑显得尤为的重要. 本文提出的算法较好地解决了瞳孔中的反射光斑问题.
首先对原始图像进行二值化, 然后寻找四联通区域并标记. 由于光斑的面积较小, 先移除一些面积较大的联通区域, 如图1(a)所示; 发现除光斑外还有一些面积很小的联通区域, 于是进一步移除, 如图1(b)所示; 把标记的区域在原始图像中显示, 如图1(c)所示.
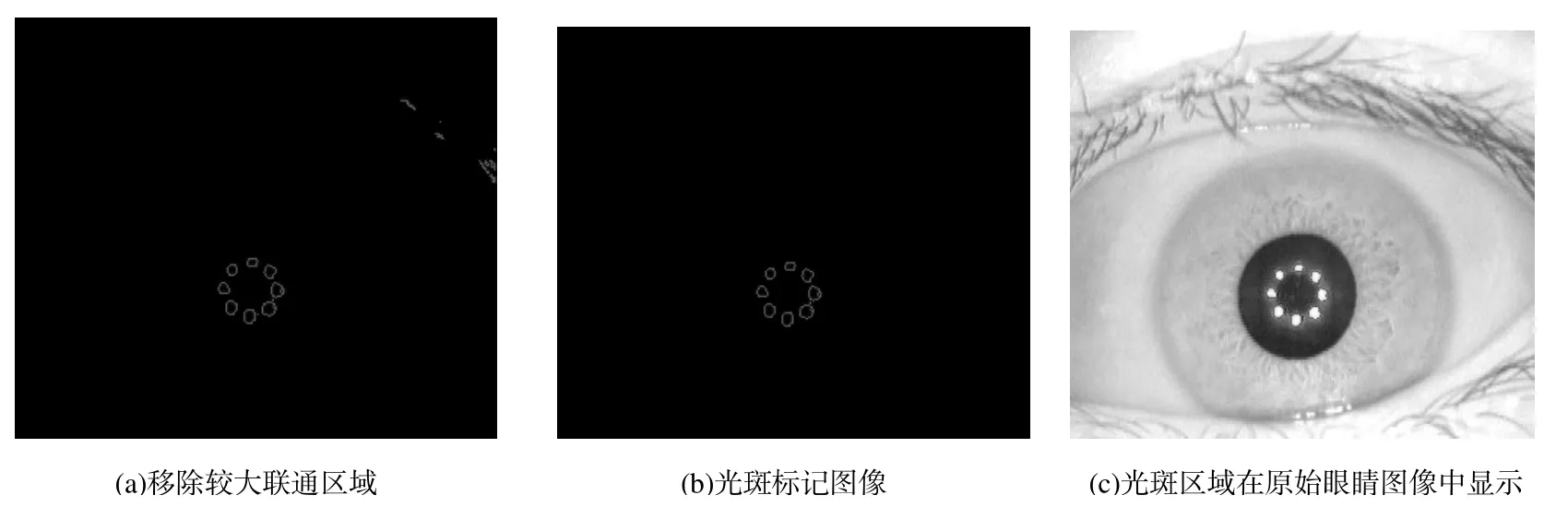
图1
1.2虹膜内边界定位
1.2.1粗定位虹膜内边界
对反射光斑进行反转双线性插值填充, 消除了其对利用灰度统计定位瞳孔内一点的影响, 因此再用灰度统计定位瞳孔内一点Q :

其中f(x, y)是消除反射光斑后图像的灰度值, xp和yp是瞳孔内一点Q的坐标值.
由于虹膜图像在采样过程中受到多种环境因素(如: 光照不均匀、睫毛、上下眼睑等)的影响, 因此, 进行内边缘提取之前, 首先对消除光斑后的图像进行中值和高斯滤波, 其模板都为5×5大小, 滤波后睫毛、瞳孔内光照不均匀等噪声的影响已大大降低.
滤波后图像的灰度呈梯度变化: 瞳孔的灰度值, 虹膜的灰度值及巩膜的灰度值依次升高. 瞳孔是图像中灰度值最小的部分, 且其受睫毛, 眼皮的干扰很小. 因此可根据其灰度特点与瞳孔近似圆形及其瞳孔内一点Q( xp,yp)进行虹膜内边界粗定位. 步骤如下:
(1) 令滤波后图像为I, 则I( x, y)为其灰度值, 在图像I中沿着点Q( xp,yp)点水平方向搜索与瞳孔灰度值差异较大的点坐标B( x1,yp)与D( x2,yp).
(2) 沿着点Q( xp,yp)点垂直方向搜索与瞳孔灰度值差异较大的点坐标A( xp,y1)与C( xp,y2).
(4) 为缩小定位误差, 上述过程迭代两次. 粗定位图如图2(a)所示.
1.2.2精定位虹膜非圆内边界
这一部分是根据粗定位的圆心及半径, 然后沿每个半径方向计算灰度梯度最大值[6]定位瞳孔边界点.其过程大致为:
如图2(a)所示, 初定位已接近真实边界, 因此令半径在[r-h, r+h]范围内变化. 令

构造一个数组H, 令H[ i]=|I( xi+1,yi+1)-I( xi,yi)|, 其中

找到沿半径θs方向数组H中的最大值. 若H[ t]是数组H中的最大值, 则(xt,yt)就为半径θs方向上瞳孔的边界点.
根据上面定位的节点, 用三阶贝塞尔曲线拟合, 图2(b)为拟合图像, 得到了一个光滑封闭的曲线轮廓. 为提高定位效率, N可以适当减小.

图2
1.3虹膜外边界定位
一般情况下虹膜内外边缘虽不是同心的, 但存在耦合关系[7], 所以可结合瞳孔定位的结果对外边界进行定位, 从而降低定位时间, 提高定位效率. 令外边界圆心矩形窗口在5×5内变化, 即(xouter,youter)=(x±5,y ±5). 设图像的宽度为W, 外边界半径为router在1.5r~min(x, W-x,4r)范围内变化.由于虹膜图像上下两部分易受睫毛与眼皮的干扰, 在计算环量积分时, θ仅在(-30°,30°)∪(150°,210°)的范围内取值. 为了对系统搜索开销进一步减少, 采取一种由粗到精的定位方法:


精确搜索, 确定虹膜外边界的精确大小. 图2(c)为最终虹膜定位效果图.
2 眼脸定位
眼脸定位包括上下眼脸定位, 其定位可分为以下几部分: 寻找边缘点及抛物线拟合.
改进的canny算子
canny算子进行边缘检测包括: 首先利用高斯低通函数进行滤波, 再进行非极大值抑制, 最后双阈值处理得到边缘图像. 对眼睛图像直接用canny算子进行边缘检测会得到许多虚假边缘, 如图3(b)所示, 不利于眼脸定位. 因此对canny算子进行以下几点改进:
(1) 对高斯滤波函数适当改进, 使平滑尺度沿行、列方向的取值不同, 沿行方向取较小的值, 降低平滑导致的眼睑边缘模糊; 沿列方向取较大的值, 弱化睫毛边缘, 突出眼睑边缘.
(2) 上下眼睑的边缘呈水平方向, 进行非极大值抑制时只对垂直梯度方向的边缘点进行搜寻.
(3) 将单阈值替换成双阈值的处理方法.
根据瞳孔定位结果, 确定上下眼睑所在区域, 从而提高眼脸检测效率. 以上眼脸为例, 截取上眼脸子图像, 用改进的canny算子进行检测, 如图3(c)上图所示. 与Canny算子对比, 改进的Canny算子进行边缘检测时排除了许多非眼脸边缘. 再对图3(c)上图寻找最大联通区域以筛选出眼脸边缘, 如图3(c)下图所示. 最后用最小二乘法抛物线拟合[8]. 眼脸定位结果如图3(d)所示.
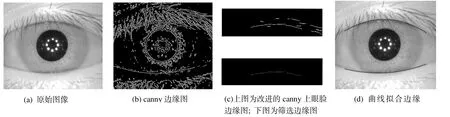
图3
3 睫毛定位
由于虹膜识别算法有一定的抗干扰能力, 如图3(a)所示, 对虹膜识别的影响不是很大, 但当睫毛投影在虹膜区域的数量较多时, 如图4(a)所示, 就会对虹膜特征提取造成很大的危害.
对于眼睫毛比较分散的, 则对图像中的点采用1D Gabor滤波器进行卷积运算, 如果计算出的值比阈值小, 则该点是眼睫毛点. 判别式为

对于连成一片的眼睫毛, 若某点中心的11 11×的领域方差比阈值小, 则该点是睫毛点. 判别式为

为提高眼睫毛定位效率, 定位时仅对包含虹膜外边界的矩形区域进行定位, 定位结果如图4(b)所示,最终预处理如图4(c)所示.
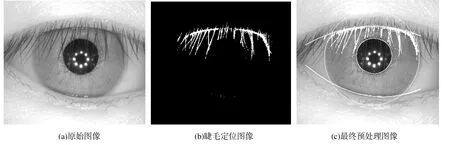
图4
4 实验结果分析
为了验证算法的有效性, 采用VS2010编程. 在 CASIA-Iris V3-Interval虹膜数据库进行实验, 该数据库是中国科学院自动化所采用自行设计的采集设备采集的, 其中包含249个人的395只眼睛的2655幅虹膜图像, 都是在室内环境采集, 每幅图像的大小为320×280. 随机选取近600幅图像进行测试. 表1给出了本文方法外边界先初定位后精定位的时间与直接精定位(SPL)的时间比较结果. 实验结果表明本文方法在定位效率方面也有了一定的提高.
图5显示了虹膜定位的三组效果图. 瞳孔存在不同程度的变形, 已不是圆形, 但本文方法仍非常准确地定位出了瞳孔边界, 定位更接近其真实边界. 从图5也可以看出, 尽管图像受到光斑、瞳孔变形、眼脸、睫毛等不同程度的干扰, 但最终都能显示出很好的定位效果. 表2给出了一些参考文献中的方法和本文的方法的定位准确率及定位时间对比. 表3给出了眼脸定位的准确率及时间对比.
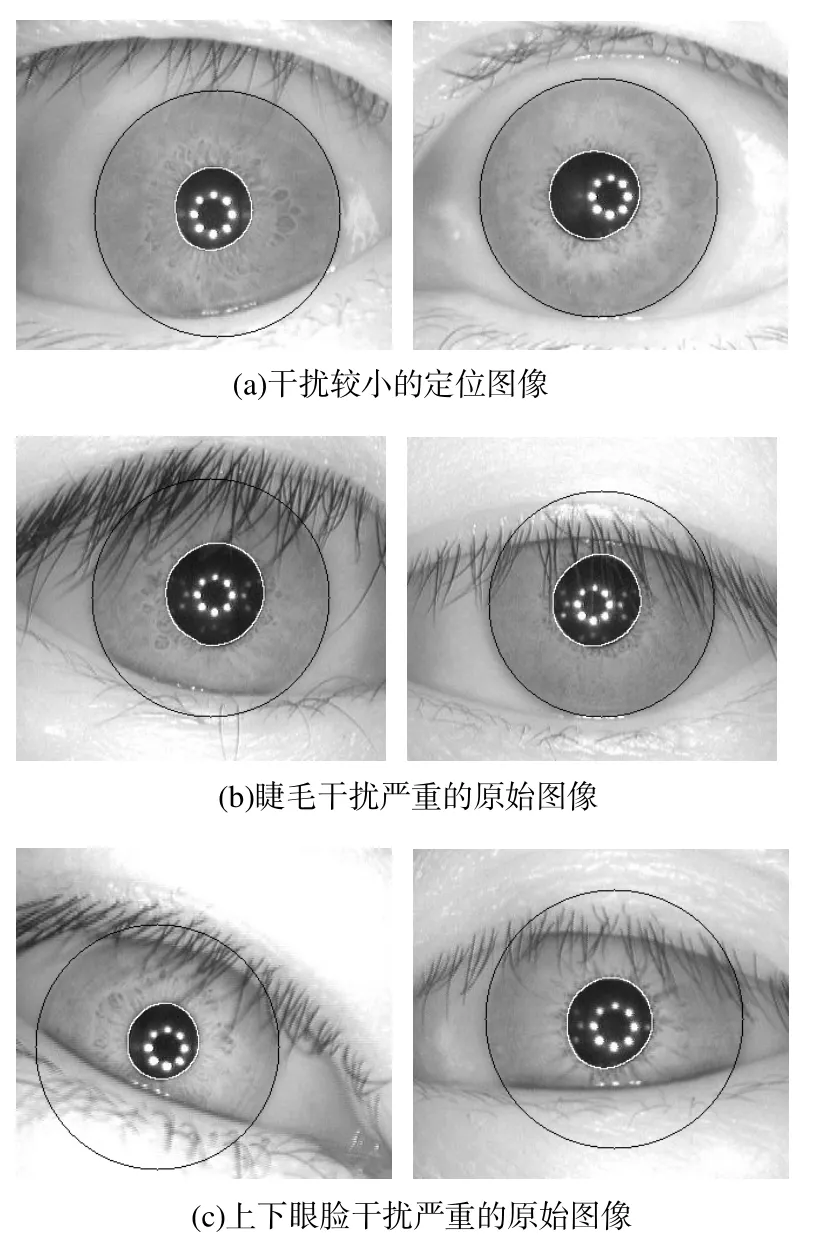
图5
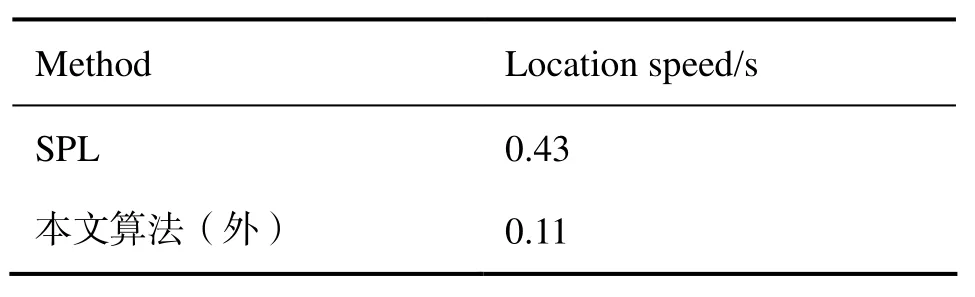
表1 时间比较(单位:S)

表2 准确度及时间比较(单位: %)

表3 眼睑定位准确度及时间比较
5 结论
从实验的结果可以知道, 本文方法对虹膜的内外边界的定位更加准确和快速, 特别是对存在变形的瞳孔的定位更加精确. 因此本算法的算法复杂度较低, 准确率较高, 对存在不同程度干扰的图像也有较好的定位效果, 且平均所需时间仅需0.32s, 满足可行性要求. 通过对比, 该眼脸定位方法也能准确、快速地定位出眼脸边缘. 因此, 该预处理方法在虹膜认证系统中有较高的实际应用价值.
[1] Daugman J. How iris recognition works[J]. IEEE, 2004, 14(1): 21~30
[2] Wildes R. Iris recognition: An emerging, biometric technology[J]. Proceeding of IEEE, 1997, 85(9): l348~1363
[3] Xinying R, Zhiyong P, Qingning Z,et a1.An improved method for Daugman’s iris localization algorithm[J]. Computers in Biology and Medicine, 2008, 38: 111~115
[4] Li Ma,Tieniu Tan, Yunhong Wang, Dexin Zhang. Efficient iris Recognition by Characterizing key local variation[J]. IEEE Transactions on Image processing, 2004,13(6):739~750
[5] 马义德, 周丽君, 李 园. 基于矢量场卷积的虹膜定位[J]. 红外与激光程, 2014, 43(10): 3497~3503
[6] Jan F ,U sman I,A gha S. Reliable iris localization using Hough transform histogram-bisection and eccentricity[J]. IEEE Transaction on Signal processing, 2013, 93( I ): 230~241
[7] Burge M, Bowyer K. Handbook of iris recognition[M]. New York: Springer Verlag, 2013: 20~48
[8] 潘 林, 魏丽芳, 郑炳锟, 等. 改进的遮挡条件下瞳孔检测方法[J]. 中国图象图形学报, 2012, 17(2): 229~235
[9] S. Bakshi, H. Mehrotra, B. Majhi. Real-time iris segmentation based on image morphology[C]. in: Proc. 2011 Int. Conf. Commun. Comput. Security (ICCCS’11),ACM, Rourkela, Odisha, India, 2011: 335~338
Preprocessing Method Based on a Kind of Irregular Iris
PENG Li-juan, LI Jian-liang
(school of science, Nanjing University of Science and Technology, Najing, jiangsu 210094)
According to the characteristics of the iris which approximate a circle but is not a circle, we present an iris inner boundary irregular positioning method and use Bezier curve to locate precisely. Then based on the coupling relationship of the iris between internal and external boundary, we present a fast positioning method for outer boundary from coarse to fine. Finally, for the located iris is often with eyelid interference, we put forward an improved canny operator and least squares method to detect eyelid edge. The experimental results show that the location accuracy of this method is higher, and the iris inner edge location is much closer to the real boundary. Furthermore, the efficiency and results of the location have been improved obviously.
iris location; eyelid location; bezier curve; improved canny operator; least squares
TP391.41
A
1672-5298(2016)03-0026-05
2016-06-23
彭丽娟(1991− ), 女, 湖南邵阳人, 南京理工大学理学院硕士研究生. 主要研究方向: 虹膜识别
猜你喜欢
中国典型病例大全(2022年11期)2022-05-13
中国医学物理学杂志(2021年1期)2021-02-05
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
汽车实用技术(2019年6期)2019-04-11
青年歌声(2018年2期)2018-10-20
文萃报·周二版(2018年51期)2018-08-04
阅读与作文(初中版)(2017年6期)2017-07-05
学苑教育(2015年16期)2015-08-15
