
L系统的Hopf分岔反控制研究
2016-11-05 08:22:51唐驾时
湖南理工学院学报(自然科学版) 2016年3期
蔡 萍, 唐驾时
(1. 闽南师范大学 数学与统计学院, 福建 漳州 363000; 2. 湖南大学 机械与运载工程学院, 长沙 410082)
蔡 萍1, 唐驾时2
(1. 闽南师范大学 数学与统计学院, 福建 漳州 363000; 2. 湖南大学 机械与运载工程学院, 长沙 410082)
分析了L系统平衡点的非线性动力学性质, 根据Hopf分岔产生的条件, 设计控制器, 使原系统不稳定的零平衡点产生极限环. 对原系统的非零平衡点, 该控制器也使其在一个更大的参数区域, 在所期望的位置产生Hopf分岔. 基于中心流形定理和规范型理论求得的稳定性指标保证了分岔解的稳定性. 因此, 该控制器成功地实现了L系统平衡点的Hopf分岔反控制, 并且原系统的平衡点并未改变. 最后, 通过数值模拟来验证理论分析的结果.
L系统; Hopf分岔; 反控制; 规范型; 稳定性
引言
近十几年来, 随着混沌控制的迅速发展, 分岔控制引起了数学、物理、工程等领域众多学者的广泛兴趣. 设计合理的控制器, 对系统的分岔行为进行控制具有重要的理论意义和实用价值[1~5]. 人们在分岔控制领域作了大量的研究工作, 提出了多种分岔控制方法, 如线性[2]及非线性反馈方法[3], Washout滤波方法[5], 规范型方法[6]等等. 相比混沌反控制, 分岔反控制的研究远未成熟, 国内外取得的研究成果不多. 分岔反控制是分岔分析的逆问题, 即在预先指定的系统参数点通过控制产生期望的分岔行为. Hopf分岔反控制是通过自动控制产生稳定的极限环, 使动力系统产生振荡, 或通过Hopf分岔反控制, 使系统在一个更大的参数区域, 在所期望的位置产生Hopf分岔. Chen等[7]系统地阐述了Hopf分岔反控制的理论、方法和技术, 奠定了Hopf分岔反控制的基础. 文[8]通过反馈控制和符号计算, 提出了一个Hopf分岔反控制方法, 使Liu混沌系统可以在一个更大的参数区域表现出Hopf分岔, 反控制策略保持了Liu系统的平衡结构, 选择了理想的位置, 保证了Hopf分岔的稳定性. 文[9]针对不同的分岔参数, 用多项式反馈控制影响零平衡点产生Hopf分岔, 并保证极限环稳定, 实现了零平衡点Hopf分岔的反控制. 文[5]和[10]采用washout-filter反馈控制器, 通过选择合适的控制参数, 分别对Chen 系统和Newton-Leipnik 系统进行了Hopf分岔反控制. 文[11]提出了一个非线性控制策略, 使一个三维系统在更大的参数范围内出现余维1、余维2和余维3 Hopf分岔, 并使该混沌系统的平衡结构保持不变, 退化Hopf分岔在期望的位置保持稳定.文[12]研究了索梁耦合结构的Hopf分岔的反控制, 实现了受控系统在指定的平衡点处产生Hopf分岔. L系统[13]具有复杂的动力学行为, 包括分岔和混沌. 近年来, 许多学者对该系统的混沌同步控制[14,15]、稳定性及Hopf分岔分析[16,17]、余维2分岔的分析及控制[18,19]方面作了大量的工作. 本文主要研究L系统的Hopf分岔控制问题. 首先, 基于Routh-Hurwitz稳定性理论分析了L系统的平衡点稳定性, 从而判断其是否产生Hopf分岔; 其次, 借助Hopf分岔理论来指导控制器的设计, 使原来不稳定的零平衡点产生了极限环, 并给出了稳定性指标. 该控制器同时也使非零平衡点的Hopf分岔参数区域得到了扩大, 从而实现了L系统的Hopf分岔反控制. 最后, 数值模拟的结果验证了理论分析的正确性和控制器的有效性.

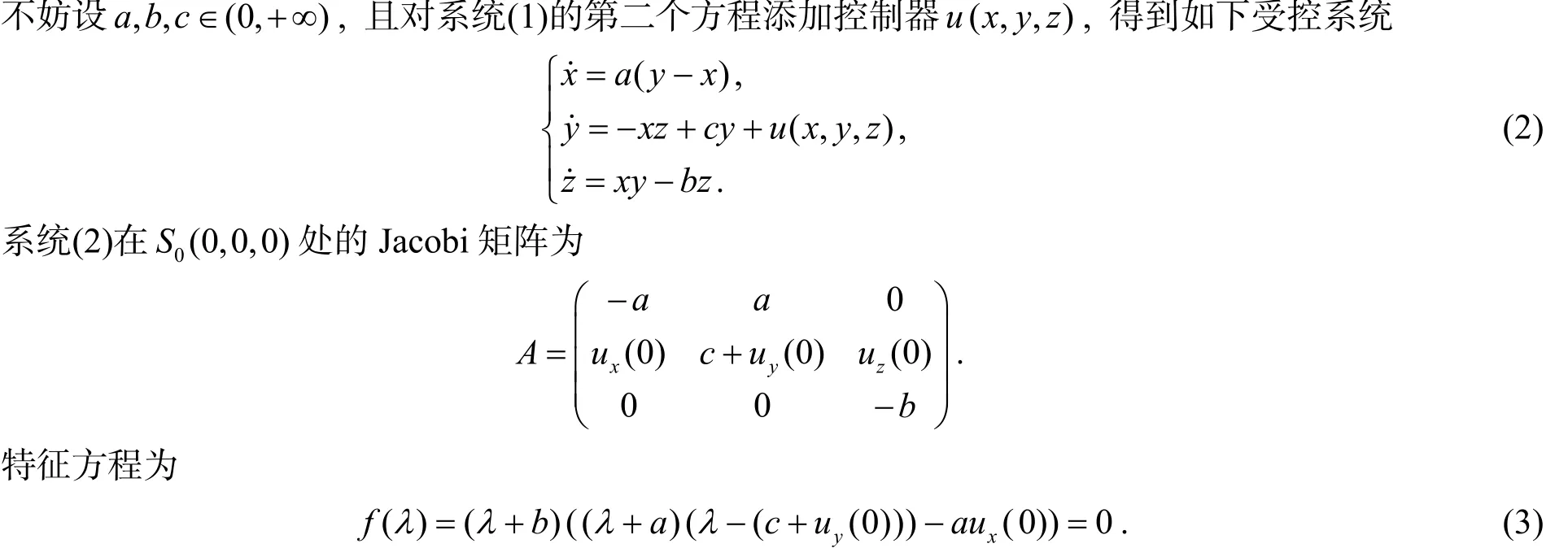
1.1平衡点0S的Hopf分岔反控制
1.1.1控制器的设计

1.1.2Hopf分岔稳定性分析

显然, 若20ab-<0, 则有20β<0, 从而保证了Hopf分岔解的稳定性.
1.2平衡点S±的Hopf分岔反控制
由于平衡点S+和S-具有几何对称性, 这里仅讨论S+处的Hopf分岔反控制. 文[18]给出未控系统(1)在平衡点S+处产生Hopf分岔的参数条件为

其中g1( u1, v1, w1),g2( u1, v1, w1),g3( u1, v1, w1)是系统的非线性部分, 由于其表达式过于复杂, 这里略去. 代入公式计算得到Hopf分岔稳定性指标β2=0, 因此, 受控系统在平衡点S+处产生的Hopf分岔为退化的, 不能确定其稳定性. 文[20]指出可以进一步计算β4来判定其稳定性, 但这是一项极为繁杂而不必要的工作,事实上, 通过数值模拟, 可以说明受控系统此时已获得稳定的极限环. 比较参数条件(7) 、(8)、(9), 显然,通过施加控制器, 使系统在一个更大的参数区域, 在所期望的位置产生了Hopf分岔, 从而实现Hopf分岔反控制目标.
2 数值模拟
若选取参数a=3,b=10,c=13, 未控系统平衡点S0是不稳定的鞍点, 如图1(a)所示. 添加控制器(6)后,仍取a=3,b=10,c =13, 并取k=0.5, 计算得到稳定性指标β2=-0.000075339<0, 受控系统在平衡点S0产生稳定的极限环, 如图1(b)所示.
若选取参数a=3,b=6,c=3, 未控系统在平衡点S+产生稳定的极限环, 如图2(a)所示. 对于受控系统,取同样的参数a=3,b=6,c=3, 并取k=0.1, 虽然稳定性指标β2=0, 但也获得了稳定的极限环, 如图2(b)所示. 选取参数a=3,b=6,c=13, 未控系统平衡点S+是不稳定的, 不发生Hopf分岔, 如图3(a)所示. 对于受控系统, 取同样的参数a=3,b=6,c=13, 以及k=0.1, 受控系统仍获得了稳定的极限环, 如图3(b)所示. 数值模拟的结果和理论分析是一致的.

图1 系统在S0处的相图

图2 系统在S+处的相图

图3 系统在S+处的相图
3 结论
[1] Cai P, Tang J S, Li Z B. Controlling Hopf Bifurcation of a New Modified Hyperchaotic LSystem [J]. Mathematical Problems in Engineering, 2015:614135
[2] 刘素华, 唐驾时. Langford 系统Hopf 分叉的线性反馈控制[J]. 物理学报, 2007, 56(6): 3145~3151
[3] Yu P, Chen G R. Hopf bifurcation control using nonlinear feedback with polynomial functions[J]. Int. J. Bifurcat. Chaos, 2004, 14(5): 1683~1704
[4] Cai P, Tang J S, Li Z B. Analysis and c ontrolling of Hopf Bifurcation for chaotic Van der Pol-Duffing system[J]. Mathematical and Computational Applications, 2014, 19(3): 184~193
[5] Cheng Z S, Cao J D. Anti-control of Hopf bifurcation for Chen’s system through washout filters[J]. Neurocomputing, 2010, 73: 3139-3146
[6] Kang W, Krener A J. Extended Quadratic Controller Normal Form and Dynamic State Feedback Linearization of Nonlinear Systems[J]. SIAM J. Control. Optim., 1992, 30(6): 1319~1337
[7] Chen D S, Wang H O, Chen G R. Anti-control of H opf bifurcations [C]. IEEE Transactions on Circuits and Systems-I: Fundamental Theory and Applications, 2001, 48(6): 661~672
[9] 刘素华, 唐驾时. 四维Qi系统零平衡点的Hopf分叉反控制[J]. 物理学报, 2008, 57(10): 6162~6167
[10] Wang X D, Zhang W L, Chen W W. Amplitude control and Hopf bifurcation anti-control of the Newton-Leipnik system[J]. International Journal of Nonlinear Science, 2012, 13(1): 58~63
[11] Wei Z C, Yang Q G. Anti-control of Hopf bifurcation in the new chaotic system with two stable node-foci[J]. Applied Mathematics and Computation,2010, 217(1): 422~429
[12] 王志搴, 唐驾时, 罗迎社. 索-梁耦合结构Hopf分岔的反控制[J]. 固体力学学报, 2016, (37)1: 90~94
[14] Yassen M T. Feedback and adaptive synchronization of chaotic Lsystem [J].. Chaos, Solitons & Fractals, 2005, 25: 379~386
[15] Park J H. Chaos synchronization of a chaotic system via nonlinear control [J]. Chaos, Solitons and Fractals, 2005, 25: 579~584
[16] Yu Y G, Zhang S C. Hopf Bifurcation in the Lsystem [J]. Chaos, Solitons and Fractals, 2003, 17: 901~906
[17] Yu Y G, Zhang S C. Hopf bifurcation analysis of the Lsystem [J]. Chaos, Solitons and Fractals, 2004, 21: 1215~1220
[20] Hassard B D, Kazarinoff N D, Wan Y. Theory and Applications of Hopf Bifurcation [M]. London: Cambridge University Press, 1981
Anti-control of Hopf Bifurcation for LSystem
CAI Ping1, TANG Jia-shi2
(1. School of Mathematics and Statistics, Minnan Normal University, Zhangzhou 363000, China;2. College of Mechanical and Vehicle Engineering, Hunan University, Changsha 410082, China)
The nonlinear dynamic property of the equilibrium of Lsystem is studied. According to the conditions of Hopf bifurcation, a certain limit cycle is created from the zero steady state by appropriate control. For nonzero steady state, the controlled system can exhibit Hopf bifurcation in a much larger parameter region at the desired location. Based on the center manifold theory and normal form reduction, the stability index of bifurcation solution is given. The anti-control strategy used keeps the equilibrium structure of the system. Finally, numerical simulation results are presented to illustrate analytical results found.
Lsystem; Hopf bifurcation; anti-control; normal form; stability
O19
A
1672-5298(2016)03-0008-06
2016-06-25
国家自然科学基金面上项目(11372102); 福建省中青年教师教育科研项目(科技)( JA15316)
蔡 萍(1979- ), 女, 福建仙游人, 博士, 闽南师范大学数学与统计学院讲师. 主要研究方向: 非线性动力学
猜你喜欢
烟台果树(2019年1期)2019-01-28 09:34:58
传媒评论(2018年7期)2018-09-18 03:45:52
数学物理学报(2018年1期)2018-03-26 08:16:44
厦门理工学院学报(2016年1期)2016-12-01 04:50:51
IT时代周刊(2015年7期)2015-11-11 05:49:56
散文百家(2014年11期)2014-08-21 07:16:58
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15
电子设计工程(2014年17期)2014-02-27 11:59:52
