基于SimMechanics操纵负荷系统建模与仿真
2016-11-04 12:34陈龙潘春萍刘志星韩鲁佳
科技视界 2016年23期
陈龙+潘春萍+刘志星+韩鲁佳

【摘 要】建模与仿真是飞行模拟器操纵负荷系统研发的关键技术之一。为分析飞行模拟器操纵负荷系统的结构及运动学原理,本文以纵向操纵系统为例,基于SimMechanics建立了飞行模拟器纵向操纵系统仿真模型,对其进行运动学仿真。在模型的相关点处设置检测模块,实时的直观的分析了系统的运动性能。仿真结果表明,在Matlab/SimMechanics仿真环境中建立飞行模拟器纵向操纵系统仿真模型,可以简洁、高效的进行运动学仿真,并得到精确分析结果。
【关键词】操纵负荷系统;SimMechanics;建模;运动学仿真
0 引言
操纵负荷系统是飞行模拟器的重要组成部分,它的仿真效果直接影响飞行员的操纵力感和对模拟器飞行质品评定,因此其必须能够实
时复现飞机的动态和静态特性。操纵系统的建模和运动学仿真是飞行模拟器操纵负荷系统研究的重要过程,通过建模与仿真可以对整个系统的结构从理论角度有更深的理解[1]。
目前,国内学者在构建飞行模拟器操纵负荷系统模型方面主要包括产生模型力的机构和模拟器加载系统两部分进行数学建模。如王辉等[2]提出三段式跟踪力模型,建立系统分段等效数学模型研究解决系统多余力与稳态误差的问题,关理想[3]则建立电动式操纵负荷系统数学模型,对系统的操纵性进行分析研究,段永胜[4]利用最小二乘参数估计法得到系统等效模型并对其操纵结构进行具体分析。然而飞行模拟器是一个半物理系统,数学模型可以解决系统运行问题,但却需要大量的公式、参数和计算,对系统的仿真实时性有很大的影响,过程复杂并影响仿真效果。所以本文采用Matlab/SimMechanics仿真工具对飞行模拟器操纵负荷系统建立机械模型并用解析法来实现对飞行模拟器祝操纵负荷系统的运动学分析。
1 系统建模仿真
1.1 飞行模拟器操纵负荷系统
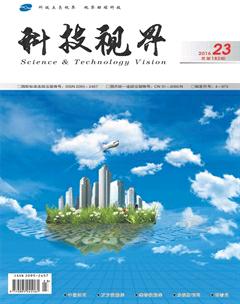
飞行模拟器操纵负荷系统有纵向、横向、航向三轴操纵系统,其模型建立原理基本相同。本文以纵向操纵系统为例进行介绍,如图1所示,纵向操纵系统是有驾驶杆机构、传动机构、电动伺服系统三部件组成。驾驶杆作纵向绕轴旋转运动;传动机构作平面运动;电液私服负荷系统作绕轴旋转运动[5]。在飞行模拟器主操纵负荷系统中,驾驶杆的长度为60cm(转轴上部分50cm,转轴下部分10cm),驾驶杆半径为2.4cm(驾驶杆此处近似看作圆柱体);联动杆长度为50cm,半径为0.8cm,作动缸内缸长度为24cm,半径为1cm;外缸长度为30cm,半径为3cm。
1.2 SimMechanics仿真模型的建立
SimMechanics是Matlab软件中Simulink环境下的多体动力机械系统及其控制系统的建模工具箱,其中包括刚体模块、运动副模块、约束与传动模块、检测与驱动模块、力元件模块及辅助工具模块,利用它可以方便的建立复杂机械系统的图示化模型[6]。
SimMechanics的建模方法与Simulink建模相似,只需将一系列关联模块在普通Simulink窗口中绘制出来,并使用其自带的检测和驱动模块与Simulink模块连接起来,设置完参数便可得到整个系统的仿真结果,无需建立复杂数学模型,即可实现实时仿真结果分析[7]。
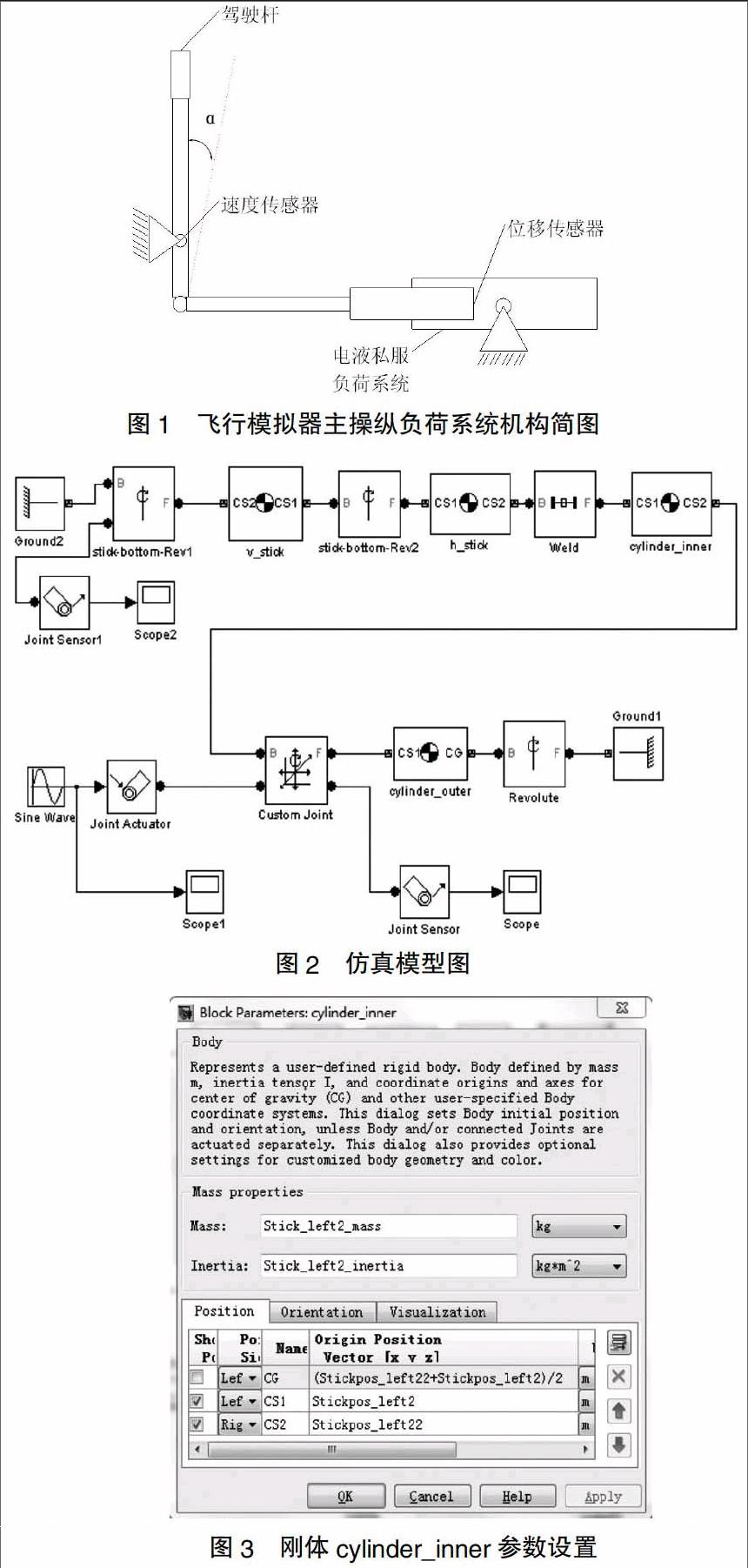
根据驾驶杆主操纵负荷系统的模型简图,用Simlink以及SimMechanics中的模块,建立仿真模型如图2所示。
图2中Ground1、Ground2表示机架模块,v_stick、h_stick、cylinder_inner、cylinder_outer为刚体模块,stick-bottom-Rev1、stick-bottom-Rev2、Revolute为单自由转动铰,Joint Sensor1、Joint Sensor为铰检测模块,Joint Actuator为在铰链处施加力或力矩模块,Scope、Scope1、Scope2为示波器模块,Weld为刚节点模块,Sine Wave为正弦波信号源。
2 模块参数设置
在SimMechanics仿真环境中建模,模块搭建的步骤非常简单,只需要挑选与实际系统构件性能相似的模块并用线连接便可完成。在搭建完模块之后便是SimMechanics建模的最关键的步骤——设置模块参数。
在仿真模型建立完成后,要对每个模块进行参数设置。如刚体模块需要设置的参数有:质量、惯性张量、位置属性、方向以及随动坐标系。下面以电动伺服系统内杆(cylinder_inner)模块为例,双击cylinder_inner模块打开参数对话框(Block Parameters)设置参数,可以看到如图3所示的对话框。
在Mass properties下有Mass和Inertia两个参数设置项。即质量参数和惯性张量参数。我们将质量参数设为Stick_left2_mass,惯性张量参数设为Stick_left2_inertia。质量和惯性张量参数只需要在编写m文件中设置好密度、长度、内径和外径然后调用inertiaCylinder函数便可,然后如图3在相应位置填上对应的变量名就完成质量和惯性张量的参数设置[13]。
Position设置的是模块的位置参数。驾驶杆的纵向运动区间是[-α,α],因为仿真模型在运动过程中各个点是随驾驶杆不断运动的,所以其坐标也是不断变化的。在位置参数中选择显示随动坐标CS1和CS2,设置CS1为电动伺服系统内杆左端坐标,CS2为电液伺服系统内杆右端坐标,CG为其几何中心。
同理可以得到其他各刚体模块的质量、转动惯量和随动坐标参数。对v_stick 、h_stick、cylinder_outer刚体模块进行参数设置,在根据需要设置输入和运动副的的转动方式便完成了主要参数的设置。
3 系统建模仿真
运行建立好的SimMechanics仿真模型,利用虚拟现实工具箱可以对整个系统运动过程进行实时演示,如图4所示为系统的某一时刻的动画演示截图。
要对刚体或运动副进行分析,就要在模型中添加传感器模块,使用Simlink中的Scope模块对仿真结果进行动画显示。在m文件编写完成和仿真参数设置完毕后启动仿真,因为stick-bottom-Rev1处运动副是转动副,它处在驾驶杆“杠杆”的支点位置,所以铰检测模块Scope2检测的结果便是该铰接处驾驶杆绕铰接点运动的和计算扭矩,如图5。
另一个铰检测模块Scope检测的是自定义铰模块Custom Joint,本文将其定义为可以转动和平动的二自由度运动副,通过在该铰接处添加正弦信号来拖动模拟器操纵负荷系统运动,正弦信号幅值设定在驾驶杆运动的极限位置,所以铰检测模块检测的是随着的正弦信号运动的联动机构的位置、速度、加速度反映驾驶杆相应的运动参数,如图6。
通过上述的仿真曲线,操纵负荷系统的驾驶杆铰接点的角度、角速度、角加速度以及电动伺服系统联动机构的位置、速度、加速度的关系及联系可以直接与仿真动画中的每一个运动过程相对应,这就使得整个操纵负荷系统的运动过程变得直观,系统的实时运动、动力参数能够方便快捷的掌握。
4 结语
本文基于SimMechanics对飞行模拟器操纵负荷系统的纵向操纵系统进行了建模并且完成运动学仿真分析,给出了系统相应的仿真结果和相关的构件的位置、速度和加速度曲线的绘制,有了这些数据才能分析、评价操纵负荷系统的工作性能,为以后的进一步研究提供了基础。
所以使用SimMechanics建立操纵负荷系统模型仿真功能强大、仿真结果方便直观并且可以实现自动建模分析,这对于提高操纵负荷系统的仿真条件以及系统的性能优化提供了新的方法,为实验奠定了理论基础。
【参考文献】
[1]王芳.知网飞行模拟器操纵负荷系统研究[D].南京:南京航空航天大学,2008:20-25.
[2]王辉,闫祥安,王立文.飞行模拟器操纵负荷系统的数学建模及仿真研究[J].中国机械工程,2006,17:258-261.
[3]关理想,顾宏斌,柴功博.一种电动式操纵负荷系统建模与仿真研究[J].飞机设计,2011,31(5):51-53.
[4]段永胜,卢颖,闫梁,等.飞行模拟器操纵负荷系统建模与仿真[J]. 兵工自动化,2012,31(8):24-28.
[5]郑淑涛,廖峰,王立文,韩俊伟.飞行模拟器操纵负荷系统实验研究[J].系统仿真学报,2008,20(4):965-969.
[责任编辑:李书培]
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
小哥白尼(神奇星球)(2021年11期)2021-03-08
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
科技与创新(2017年3期)2017-03-17
江西通信科技(2015年3期)2015-12-05
海军航空大学学报(2015年1期)2015-11-11
装备环境工程(2015年5期)2015-02-28
机械制造与自动化(2014年1期)2014-03-01
山西大同大学学报(自然科学版)(2014年6期)2014-01-23