基于相平面方法的车辆稳定性控制
2016-11-03 03:27:43李道飞
工程设计学报 2016年5期
柳 江, 陈 朋, 李道飞
(1.青岛理工大学 汽车与交通学院, 山东 青岛 266520;2.浙江大学 动力机械及车辆工程研究所, 浙江 杭州 310027)
基于相平面方法的车辆稳定性控制
柳江1, 陈朋1, 李道飞2
(1.青岛理工大学 汽车与交通学院, 山东 青岛 266520;2.浙江大学 动力机械及车辆工程研究所, 浙江 杭州 310027)

相平面方法; 边界函数; 稳定性; 横摆力矩控制

1 车辆模型的建立
1.1整车模型
针对某紧凑型轿车,建立二自由度扩展的整车模型,如图1所示.忽略空气阻力以及转向系统和悬架系统的影响,考虑4个车轮在非线性域内的侧偏角和垂直载荷的变化,分别计算各个轮胎的侧向力.

图1 整车模型Fig.1 The vehicle model
由整车模型可以得到系统运动方程:

(1)

(2)
β=arctan(v/u).
(3)
各个轮胎的侧偏角如下:

(4)

(5)

(6)

(7)
为了研究轮胎非线性,考虑到载荷的转移,4个轮胎的垂直载荷分别是:

(8)

(9)
(10)

(11)
式(1)至式(11)中:δ是前轮转角,u是整车的纵向速度,v是整车的侧向速度,β是质心侧偏角,r是横摆角速度,αi(i=1,2,3,4)分别是4个轮胎的侧偏角,Fyi(i=1,2,3,4)分别是4个轮胎的侧向力,整车的其他参数如表1.

表1 整车的部分参数
1.2轮胎模型
由于稳定性控制是在轮胎的非线性区域内发生,需要对轮胎实际的侧向力进行拟合.考虑轮胎力的有效性和计算的简洁性,采用简化的MF公式进行拟合[6].
轮胎侧向力由下式给出:
Fy=μFzsin(Darctan(Bαi)),
(12)
式中:Fy是轮胎的侧向力,μ是路面的附着系数,Fz是轮胎的垂直载荷,B和D是待拟合系数.拟合结果如图2.

图2 不同垂直载荷下轮胎侧向力的拟合Fig.2 The fitting of tire lateral force at different vertical loads
在μ=1时,通过对不同垂直载荷下轮胎侧向力的拟合,发现随着轮胎侧偏角的变化,可得到公式(12)的拟合系数:B=1.438,D=0.210 8.
拟合的轮胎侧向力最大偏差为2%,但是经过估算,单个轮胎的主要垂直载荷工作区域是在5 000 N之内,所以通过拟合而得到的参数能够满足相平面的要求.
2 相平面边界
由于路面附着系数和车速对相平面的边界影响很大,故需计算不同车速和路面附着系数下的稳定性边界,再根据此结果拟合出能够随着车速和路面附着系数变化的边界函数.
2.1相平面稳定边界
所建立的整车模型方程可以表示为公式(13)和(14)所示的二阶自治系统:

(13)
(14)

图相平面图Fig.
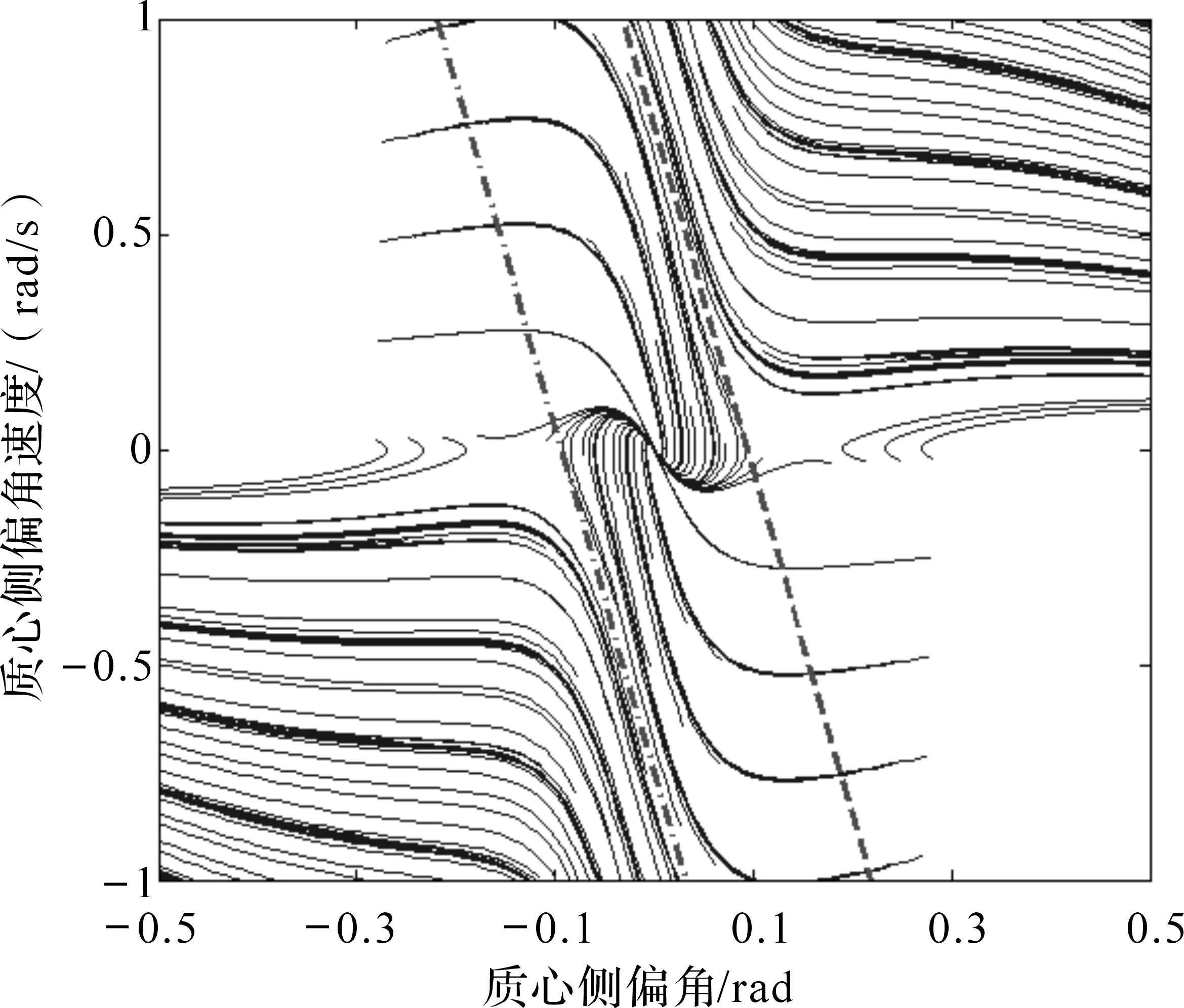
图相平面图稳定区域Fig. phase plane with stability region
通过观察图3相平面的轨迹线变化,根据能回到稳定相点(0,0)的轨迹线划分稳定区域,划分的相平面稳定区域为图5中的2条对称虚直线包围的区域,这2条虚直线可以用方程(15)表示:

(15)
式中k1,c1为边界系数.
类似地,根据图4能够回到原点的相轨迹,用2条对称的双折线划分稳定区域,如图6中的虚线所示,并可用方程(16)和(17)同时表示:
|r+k2β|≤c2,
(16)
|r|≤c3,
(17)
式中k2,c2和c3都是此稳定域的边界系数.

图6 β-r相平面图稳定区域Fig.6 β-r phase plane with stability region
2.2不同路面附着系数的影响
整车速度u0不变时,通过改变附着系数,获得2种相平面的稳定边界的参数,获得的数据对应表2和表3.

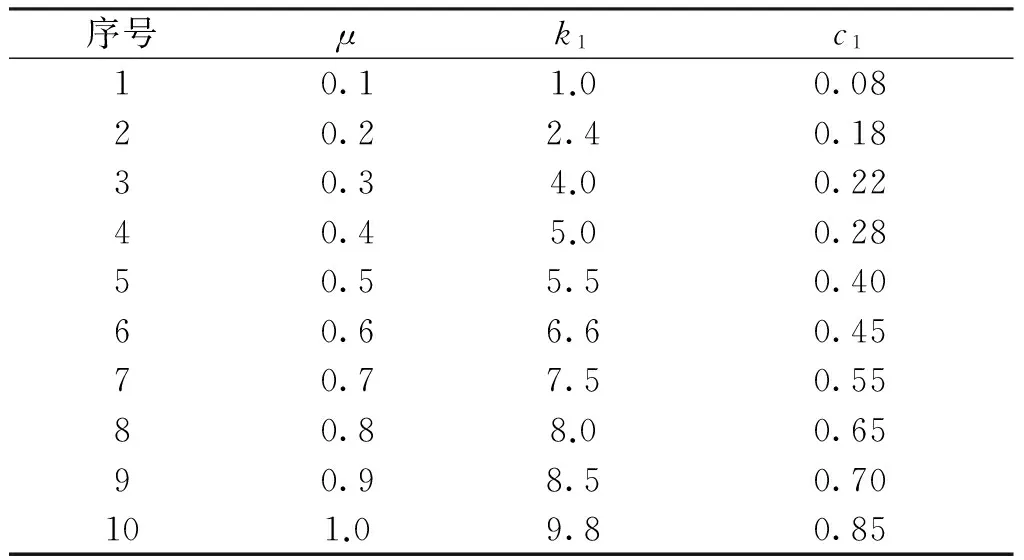
序号μk1c110.11.00.0820.22.40.1830.34.00.2240.45.00.2850.55.50.4060.66.60.4570.77.50.5580.88.00.6590.98.50.70101.09.80.85
表3不同路面附着系数下β-r相平面的边界参数
Table 3Boundary parameters ofβ-rphase plane under different road friction coefficients

序号μk2c2c310.10.70.080.021220.21.30.150.042430.32.00.250.063640.42.20.320.084850.52.70.420.106960.63.00.490.127170.73.80.500.148380.84.10.600.169590.94.50.700.1907101.05.00.800.2119
运用多项式拟合表2的数据,得到拟合公式(18)和(19):
k1=-4.28μ2+13.83μ-0.1283,
(18)
c1=0.2197μ2+0.5814μ+0.03167.
(19)
拟合表3中的数据,得到拟合公式 (20),(21)和(22):
k2=4.618μ+0.38,
(20)
c2=0.757μ+0.0107,
(21)
c3=0.212μ.
(22)
2.3不同车速的影响

序号u/(km/h)k1c11608.050.752708.050.763808.010.754908.010.7751008.000.7561107.950.7671208.020.7481308.000.7491408.010.76101508.000.76
表5不同车速下β-r相平面的边界参数
Table 5Boundary parameters ofβ-rphase plane under different vehicle speeds

序号u/(km/h)k2c2c31605.01.00.28252704.80.900.24223804.50.800.21194904.30.700.188451004.10.600.169561103.90.550.154171203.70.560.141381303.50.500.130491403.00.450.1211101502.80.400.1130
从图表5可知,车速u与3个参数成反比关系,通过数据得到边界参数的拟合公式(23),(24)和(25):

(23)

(24)

(25)
2.4边界函数

β-r相平面边界方程的参数与μ成正比关系,而与车速成反比关系,通过路面附着系数和车速拟合的方程,可以得到β-r相平面的边界函数:
(27)
3 车辆主动稳定性控制器的设计

图7 车辆稳定性控制系统架构Fig.7 Framework of vehicle stability control system
对图5相平面中划分的稳定性区域进行处理,如图8.

图相图误差的计算Fig.8 Calculation of phase plane error
由图8得到相平面的误差计算公式:

(28)

(29)

(30)

运用PID控制算法得到横摆力矩:

(31)
3.2基于β-r相平面的横摆力矩的计算
对图6相平面划分的稳定区域进行处理,得到简化的相平面图边界,如图9.

图9 β-r相图误差的计算Fig.9 Calculation of β-r phase plane error
通过图9获得β-r相平面的误差eβ-r:
e1=|r|-c3,
(32)

(33)
eβ-r=min(e1,e2),
(34)
式中:e1是不稳定相点到水平线的距离且e1≥0,e2是不稳定相点到斜线的距离且e2≥0.
运用PID控制算法得到β-r相平面图的横摆力矩如下:

(35)
式中:Kpr是β-r相平面比例参数,Kir是积分的参数,Kdr是微分的参数.
3.3期望的横摆力矩的计算

(36)

图10 分配系数m的变化Fig.10 Change of distribution coefficient m

(37)
式中:
E1=1/c1,
(38)
E2=k1/c1.
(39)
4 仿真验证


图11 方向盘转角的输入Fig.11 Input of steer wheel angle


图12 质心侧偏角的变化Fig.12 Changes of vehicle sideslip angle
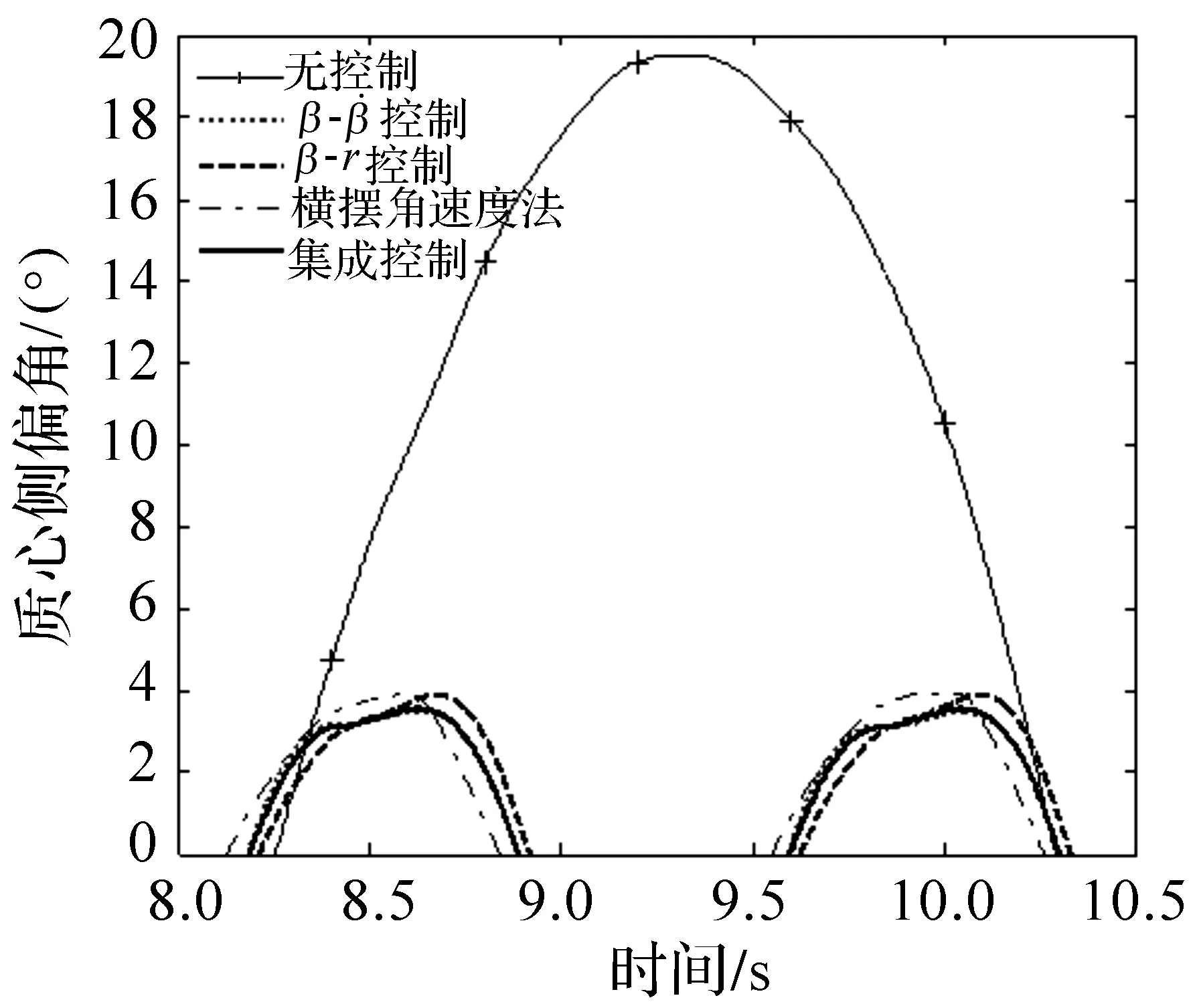
图13 图12中A区域放大图Fig.13 The enlarged drawing of A area in figure 12

图14 横摆角速度的变化Fig.14 Changes of yaw rate

图15 图14中B区域放大图Fig.15 The enlarged drawing of B area in figure 14

图16 分配系数m的变化Fig.16 The change of contribution coefficient m

图17 不同控制策略下相平面图相轨迹对比Fig.17 Comparison of phase trajectory for phase plane under different control strategies

图18 不同控制策略下β-r相平面图相轨迹对比Fig.18 Comparison of phase trajectory for β-r phase plane under different control strategies
5 结 论
[1] Van ZANTEN A T. Bosch ESP systems: 5 years of experience[J]. SAE Technical Paper, 2002, 2000-01-1633.
[2] NAOTO O, TAKEHIRO H, OSAMU Y, et al. Brake torque sensing for enhancement of vehicle dynamics control systems[J]. SAE Technical Paper, 2007, 2007-01-0867.
[3] ZHANG Lei, LIANG Yao-yu, PAN Ning, et al. Vehicle direct yaw moment control based on tire cornering stiffness estimation[C]//Procedings of the ASME 2014 Dynamics Systems and Control Conference.San Antonio, October 22-24,2014: 2-8.
[4] 胡延平,陈无畏,刘翔宇,等.基于非线性直接横摆力矩控制的ESP研究[J].汽车工程,2013, 35(5): 424-429.
HU Yan-ping, CHEN Wu-wei, LIU Xiang-yu, et al. A study on electronic stability program based on nonlinear direct yaw-moment control[J]. Automotive Engineering, 2013, 35(5): 424-429.
[5] SAMSUNDAR J, HUSTON J. Estimating lateral stability region of a nonlinear 2 degree-of-freedom vehicle[J]. SAE Technical Paper, 1988, 981172.
[6] PACEJKA H B. Tire and vehicle dynamics[M]. Oxford: Butterworth-Heinemann,2002: 46-50.
[7] 郭孔辉.汽车操纵动力学原理[M].南京:江苏科学技术出版社,2011: 42-57.
GUO Kong-hui. Vehicle handling dynamics[M]. Nanjing: Jiangsu Science Technology Press, 2011: 42-57.
[8] GUO K. A study of a phase plane representation for identifying vehicle behavior[J]. Vehicle Ststem Dynamics, 1986, 14(1): 152-167.
[9] ONO E, HOSEO S. Bifurcation in vehicle dynamics and robust front wheel steering control[J]. IEEE Transactions on Control Systems Technology, 1998, 6(3): 412-420.
[10] SHEN Shui-wen, WANG Jun. Nonlinear dynamics and stability analysis of vehicle plane motions[J]. Vehicle System Dynamics, 2007, 45(1): 15-23.
[11] INAGAKI S, KSHIRO I, YAMAMOTO M. Analysis on vehicle stability in critical cornering using phase plane method[J]. JSAE Review, 1995, 16(2): 287-292.
[12] KEN K, MASAKI Y. Vehicle stability control in limit cornering by active brake[J]. SAE Technical Paper, 1996, 960487.
[13] HE J, CROLLA D, LEVESLEY M, et al. Coordination of active steering, driveline and braking for integrated vehicle dynamics control[J]. Proc IMechE Part D: Journal of Automobile Engineering, 2006, 220(10): 1401-1421.
[14] 张晨晨,夏群生,何乐.质心侧偏角对车辆稳定性影响的研究[J].汽车工程,2011, 33(4): 277-282.
ZHANG Chen-chen, XIA Qun-sheng, HE Le. A study on the influence of sideslip angle at mass center on vehicle stability[J]. Automotive Engineering, 2011, 33(4): 277-282.
[15] 刘伟,丁海涛,郭孔辉,等.质心侧偏角相图在车辆ESC系统稳定性控制的应用[J].北京理工大学学报,2013, 33(1): 42-46.
LIU Wei, DING Hai-tao, GUO Kong-hui, et al. Application of side-slip angle phasigram to vehicle ESC system[J]. Transactions of Beijing Institute of Technology, 2013, 33(1): 42-46.
[16] 刘飞,熊璐,邓律华,等.基于相平面法的车辆行驶稳定性判定方法[J].华南理工大学学报,2014, 42(11): 63-70.
LIU Fei, XIONG Lu, DENG Lü-hua, et al. Vehicle stability criterion based on phase plane method[J]. Journal of South China University of Technology, 2014, 42(11): 63-70.
[17] 熊璐,曲彤,冯源,等.极限工况下车辆行驶的稳定性判据[J]. 机械工程学报,2015, 51(10): 103-111.
XIONG Lu, QU Tong, FENG Yuan, et al. Stability criterion for the vehicle under critical driving situation[J]. Journal of Mechanical Engineering, 2015, 51(10): 103-111.
[18] SLOTINE JJE, LI Wei-ping. Applied nonlinear control [M]. Englewood Cliff : Prentice Hall, 1991: 1-10.
Vehicle stability control based on phase-plane method
LIU Jiang1, CHEN Peng1, LI Dao-fei2
(1.School of Automobile and Transportation, Qingdao University of Technology, Qingdao 266520, China;2.Institute of Power Machinery and Vehicle Engineering, Zhejiang University, Hangzhou 310027, China)
phase-plane method; boundary function; stability; yaw moment control

2015-10-13.
国家自然科学基金资助项目(51575288,51205345);中央高校基本科研业务费专项资金资助项目(2015QNA4014);浙江省教育厅项目(Y201121739);浙江省重点科技创新团队项目(2011R50008).
柳江(1976—),男,山东青岛人,副教授,博士,从事车辆系统动力学与车辆控制研究,E-mail:zeh@163.com.
http://orcid.org//0000-0002-2541-7131通信联系人:李道飞(1981—),男,浙江江山人,副教授,博士,从事车辆系统动力学与车辆控制研究,E-mail: dfli@zju.edu.cn.
10.3785/j.issn. 1006-754X.2016.05.002
U 46
A
1006-754X(2016)05-0409-08
本刊网址·在线期刊:http://www.zjujournals.com/gcsjxb
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
鸭绿江·下半月(2020年2期)2020-04-07 03:37:05
鸭绿江·下半月(2020年1期)2020-03-23 05:57:35
鸭绿江·下半月(2019年12期)2019-10-21 06:49:52
新课程·中学(2019年7期)2019-09-17 13:41:15
物理教学探讨(2018年1期)2018-02-13 09:26:52
华东师范大学学报(自然科学版)(2017年1期)2017-02-27 13:41:06
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35