基于BYEC-1820运动控制器的中置柜检修智能小车控制系统
2016-11-03 11:08周维明支劲超季安邦
制造业自动化 2016年10期
周维明,刘 翔,支劲超,季安邦
(1.国网江苏省电力公司常州供电公司,常州 213164;2.常州市骠马工业机器人系统工程有限公司,常州 213164)
基于BYEC-1820运动控制器的中置柜检修智能小车控制系统
周维明1,刘 翔2,支劲超1,季安邦2
(1.国网江苏省电力公司常州供电公司,常州 213164;2.常州市骠马工业机器人系统工程有限公司,常州 213164)
在供电系统中,为了保证安全性和可靠性,中置柜每隔一段时间需要检修一次,然而中置柜非常重,需要一种智能小车来进行辅助操作,提高效率和增加安全性,把职工从繁重的人工操作中解放出来。小车主控制器采用BYEC-1820运动控制器,小车的驱动环节由伺服电机构成,要求电机的输出转矩过渡平滑,电机的软硬启动特性良好。采用图像处理技术用于小车的视觉定位系统(VSL),保证了小车能准确抓取中置柜断路器开关。小车水平调整平台上安装有水平传感器,利用模糊PID控制技术提高小车检修平台的水平调节准确性。利用外扩液晶显示器显示小车各个部分动作指令按键和小车各部分运行状态。小车成功应用于中置柜断路器安装、调试、检修过程中,显著提高了检修工作的安全性和效率,减少了检修工作的人工投入,明显缩短了中置柜断路器检修工作的停电时间。
触摸屏;伺服电机;自动水平调整;模糊PID控制
0 引言
中置柜的全称为铠装型移开中置式金属封闭开关设备,其分三层结构,上层为母线和仪表室(相互隔离),中间层为断路器室,下层为电缆室。其结构图如图1所示,由于断路器在中间层,所以称为铠装型移开中置式金属封闭开关设备,简称中置柜。因为断路器的重量一般在100kg以上,以往检修断路器时常使用如图2类似的人工小车。为了提高效率和增加安全性,并把职工从繁重的操作中解放出来,研制了一台智能小车辅助中置柜断路器的检修。该小车具有以下功能:

图1 中置柜和断路器

图2 目前使用的手动检修小车
1)机械结构能够承载当前不同中置柜断路器型号最大重量。
2)小车可以在人为控制下,平稳行走,能够精确停靠在中置柜前固定位置,以便将断路器拉出和推进。
3)小车支撑平台有上下升降功能,可适应不同型号中置柜断路器层的高度。
4)小车水平调整平台具有水平调整能力,可适应地面不平和断路器自身重量引起的支撑平台的变形。
5)小车动力部分能够支撑小车完成以上所有动作,且方便使用控制器统一控制。
6)需能使用触摸显示屏对小车运行状态进行显示,并能使用触摸屏对小车进行操作。
7)能自动识别断路器下的把手,使小车上的抓取装置准确、快速、稳固抓取到断路器。
1 机械结构及动力部分
1.1小车整体机械构架
智能小车整体机械构架如图3所示。
1)顶部装配体平台:该平台上安装有VSL设备和机械抓手,用于断路器把手的自动识别和抓取。
2)水平调整平台:用于调节顶部装配平台的水平,以使断路器托板和顶部装配体平台保持平行,能使得断路器可以平行推进/拉出。
3)平台承重支架:用于水平调整平台和顶部装配体平台的整体升降。
4)提升小车主体:用于支撑整个小车的上层机构,负责小车转向和行进,并且为小车电控部分提供安装支撑。
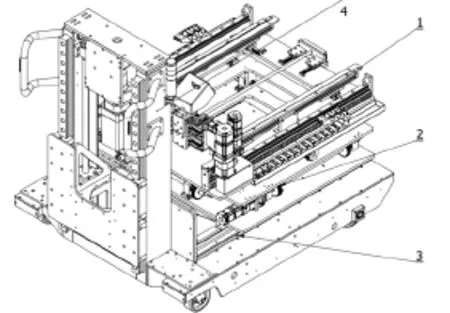
图3 智能小车整体机械构架
1.2动力单元
本设计中,小车部分主要靠伺服电机来驱动,且需要完成精确定位控制和同步控制。伺服电机采用多摩川伺服电机,为10极电机转子、12极电机定子设计,降低了约65%的电机脉动转矩,SE系列伺服电机适合各种加工机器或便捷型传输系统等要求低振动的应用场合。整体可提高约20%效率,实现低损耗、小型化、轻量化。
伺服系统内部采用了模糊PID算法,模糊PID是PID算法与模糊控制理论相结合的一种控制理论,PID模糊控制重要的任务是找出PID的三个参数与误差e和误差变化率ec之间的模糊关系,在运行中不断检测e和ec,根据确定的模糊控制规则来对三个参数进行在线调整,满足不同e和ec时对三个参数的不同要求。
通过高速DSP数字信号处理器和每圈10000个脉冲的反馈编码器,可实现高精度定位以及低速稳定性,保证最高500Hz速度响应频率,如图4所示。

图4 电机稳定性和响应频率
采用步云公司研发的伺服电机控制器内部高精度定位控制算法,高精度定位控制可有效降低位置偏差,效果如图5所示。

图5 常规控制和高精度定位控制对位置偏差的影响
2 控制系统
2.1控制系统硬件组成
小车控制系统硬件主要由伺服电机驱动器、VSL控制器、触摸屏、外部传感器等设备构成,如图6所示。其中CPU是一款内置专业运动控制芯片的可编程运动控制器BYEC-1820。采用世界先进的分布式双总线控制结构,运动控制功能强大,构架简单灵活,并且符合多项工业标准PAC控制器,支持Visual C/C++;C#等多种语言编程控制。
如图7所示,步云可编程运动控制器BYEC-1820通过Profibus贯穿整个硬件架构,方便、快捷地提升系统稳定性及可靠性,大大减少了配线成本[1]。
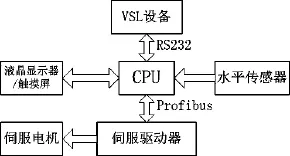
图6 智能小车控制系统硬件架构
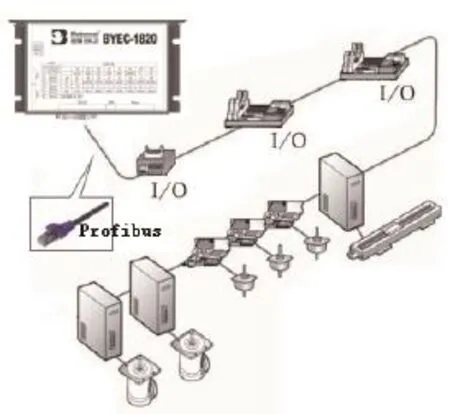
图7 运动控制系统硬件结构
2.2水平调整平台的控制
小车路径的行走以及水平承重支架的上升/下降均通过人工手动控制触摸屏上的按键来实现进退转向和升降操作,所以不做具体介绍。平台的水平调整采用模糊PID控制算法实现。
2.2.1基本PID算法
PID控制器在连续控制系统中,按偏差的比例P、积分I、微分D进行计算调整并输出,以控制小车前进。基本PID控制算法分为位置式PID控制算法和增量式PID控制算法[2],其中增量式PID控制算法比较常用。
2.2.2增量式PID控制算法
增量式算法输出的时空质量的增量Δu(k):

上式变换后,可得到下式:

其中,T为采样周期。
2.2.3模糊控制规则
模糊控制是以模糊集合论、模糊语言变量及模糊推理为基础的一种计算机数字控制。它是基于被控系统的不确定性,模拟人的思维方式和人的控制经验来表征事物本身性质的一种智能控制,适用于复杂、不能精确建立数学模型的被控对象。
模糊控制系统原理框图如图8所示,虚线框部分为模糊控制器。模糊控制系统由输入/输出接口、检测装置、执行机构、被控对象及模糊控制器组成闭环系统[3]。
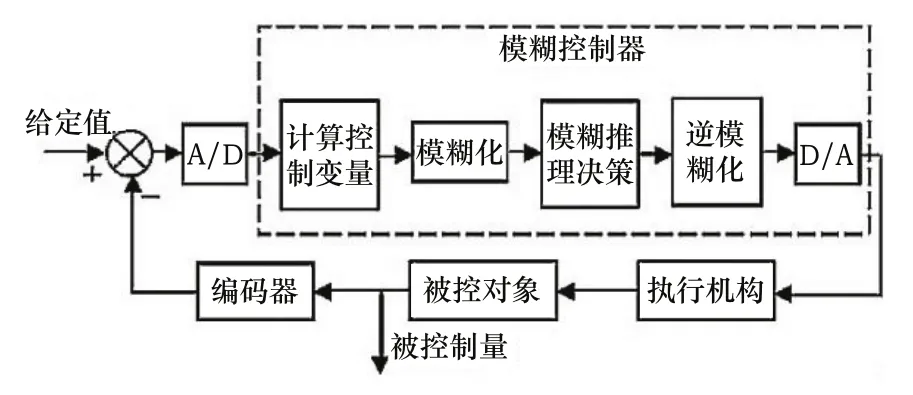
图8 模糊控制系统原理框图
1)输入/输出接口
输入/输出接口均与控制器相连,常常是模数转换电路(A/D)和数模转换电路(D/A)。输入接口与水平传感器连接,把检测信号转化为数字信号并输入给C P U处理。输出接口把C P U输出的数字信号转换为位移信号,分别输出驱动给X/Y方向的伺服驱动器[4]。
2)执行机构
小车水平调整系统执行机构分别由X和Y两个方向的伺服电机调节顶部装配体平台的水平。
3)检测装置
小车水平调整系统的检测装置。
4)被控对象
被控对象为小车水平调整平台如图9所示,其有X方向的位移、Y方向的位移,它们根据水平传感器的感应信号来确定X/Y方向的输出位移偏移量。
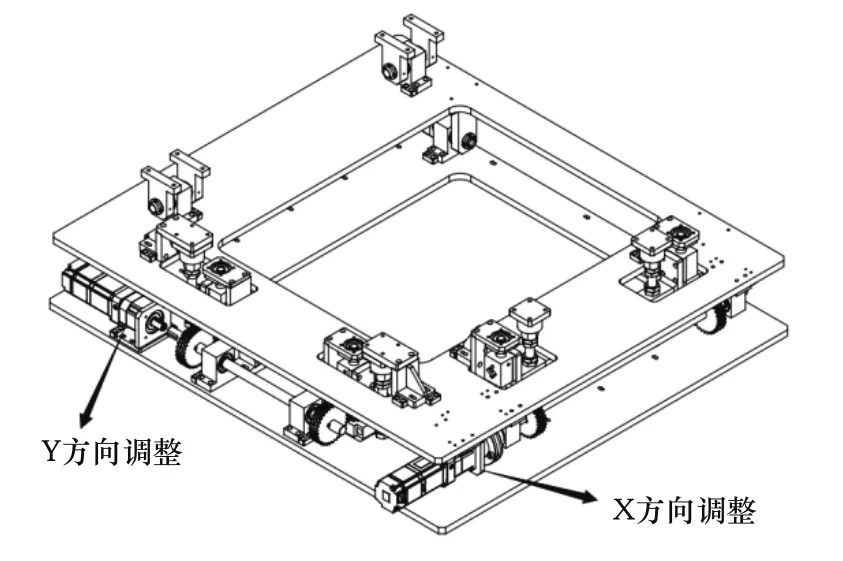
图9 水平调整平台机械结构
5)模糊控制器
模糊控制器是模糊控制系统的核心,在智能车上由DSP程序和相关硬件组织,实现模糊控制算法。
2.2.4小车控制系统的模糊PID理论
模糊PID算法是基于基本PID算式,采用模糊语言变量和模糊推理进行控制的算法。模糊PID控制器由传统PID控制器和模糊控制环节组成,在控制上不使用固定参数PID算法,而是针对不同水平传感器信号,由模糊控制算法确定实时PID参数值进行系统控制[5]。
小车使用双轴电子水平传感器,利用I2C总线和CPU相连,分别有X方向和Y方向的倾角信息传入CPU中。
以X方向的模糊PID为例,如图10所示,小车到达指定位置后,由人工在触摸屏上按下水平调整按钮,小车会根据当前水平传感器的数据值,由主程序计算实际X方向角度和期望偏差e(k)及偏差变化率,并由相关位移PID算法得出位移输出值,由电机执行。

图10 模糊PID控制器结构框图
同理,Y方向的模糊PID控制和X方向是类似的,不再赘述。
较传统PID算法,模糊PID控制算法不仅使系统具有模糊控制的灵活性和适应性强的优点,而且具有PID控制精度高的优势,很适合应用在小车水平调整上[6]。
3 小车控制系统软件设计
如图11所示,小车CPU所有硬件都需要对应低层初始化,硬件初始化完成后会启动WinCE嵌入式操作系统,系统启动正常后运行控制软件,通过控制软件调用小车各部分控制程序来完成对小车的所有操作及功能实现。
控制软件主要有下面三个:
MyConfig for EasyPAC是配置工具,是调整系统的组态工具,例如IP地址等。
MyDataCheck 是通讯数据映射工具,主要是对于通讯地址的映射。
MyLink for EasyPAC是小车运行控制工具,主要是可以初步检查通讯是否正常,伺服有无异常状况,以及对于I/O口的初步测试。
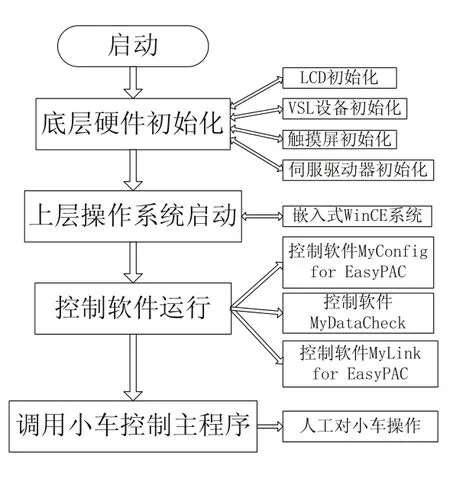
图11 小车控制系统启动及控制流程
通过小车控制软件MyLink for EasyPAC,小车所有控制命令由系统中的触摸屏发出。包括小车的前进/后退/转向、提升/下降、水平调整、自动识别中置柜断路器托盘把手等命令都是靠人工在触摸屏上选择相应命令按钮。小车操作流程图如图12所示。
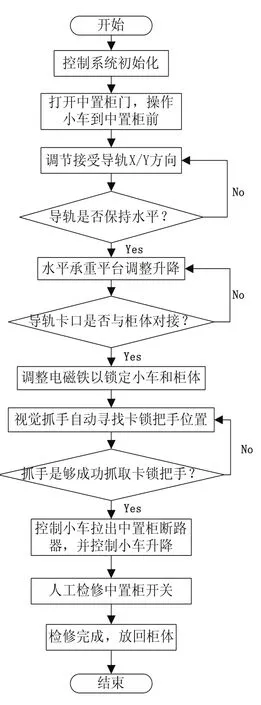
图12 小车操作流程图
4 结束语
本中置柜智能操作检修小车已成功应用于中置柜断路器安装、调试、检修过程中,如图13所示。该小车可以根据不同柜体的需求、柜体安装偏差等因素,自动调整平台高度及水平;可以模拟人工操作行为,安全可靠地将开关与本体之间来回移动操作,自动化程度高;同时可以升降小车平台,为检修工作提供空间;拥有自动行走机构及动力供应部件,可以满足小范围的移动需求。
上述功能的实现显著提高了检修工作的安全性和效率,减少了检修工作的人工投入,明显缩短了10kV中置柜断路器检修工作的停电时间。
【】【】
Control system of smart car for centrally installed switchgear maintaining based on BYEC-1820 motion controller
ZHOU Wei-ming1, LIU Xiang2, ZHI Jin-chao1, JI An-bang2
TP273
A
1009-0134(2016)10-0010-04
2016-07-25
国家电网公司科技项目资助(SGJSCZ00FZJS1500925)
周维明(1970 -),男,江苏常州人,高级工程师,本科,主要从事电力系统自动化方向的研究工作。
猜你喜欢
微特电机(2020年11期)2020-12-30
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
中国自行车(2017年5期)2017-06-24
电子制作(2016年1期)2016-11-07
专用汽车(2016年9期)2016-03-01
专用汽车(2016年5期)2016-03-01
专用汽车(2016年5期)2016-03-01