
舰载机起降限制区域及主要影响参数
2016-11-03 05:25晋文超李鹏李亚军邱辽原
中国舰船研究 2016年5期
晋文超,李鹏,李亚军,邱辽原
1海军装备研究院,北京100161
2中国舰船研究设计中心,湖北武汉430064
舰载机起降限制区域及主要影响参数
晋文超1,李鹏2,李亚军2,邱辽原2
1海军装备研究院,北京100161
2中国舰船研究设计中心,湖北武汉430064
舰载机起降作业能力直接反映了航空母舰(简称“航母”)的作战能力。根据美国“尼米兹”级航母的图片资料进行航母船型的设计,通过STF切片理论对本船的运动参数进行理论预报,并结合CV/CVN甲板运动限制准则,利用判断函数,以极坐标图形式直观反映航母运动参数对舰载机起降作业的限制区域和非限制区域。从航母自身运动特性出发,逐项分析航母运动参数对舰载机起降作业的影响,明确提出不同浪向下限制舰载机起降的主要运动参数,并分析影响舰载机起降运动参数的敏感性。为航母设计过程中改善耐波性、扩大舰载机起降作业区域指明优化方向。
航空母舰;舰载机;耐波性;限制区域
网络出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20160921.1345.032.html期刊网址:www.ship-research.com
引用格式:晋文超,李鹏,李亚军,等.舰载机起降限制区域及主要影响参数[J].中国舰船研究,2016,11(5):28-34.
JIN Wenchao,LI Peng,LI Yajun,et al.Restricted regions and main influence parameters for the takeoff and landing of carrier-based aircrafts[J].Chinese Journal of Ship Research,2016,11(5):28-34.
0 引言
目前,国内外对航母舰载机起降作业的研究偏重于着舰引导的过程,一般采取的方法是通过对航母运动进行极短期预报,然后结合合理的引导控制律,实现舰载机进舰下滑过程的模拟。国内许多学者对运动极短期预报和引导控制律分别展开了研究,如段文洋等[1-2]采用AR模型、顾民等[3]基于混沌理论与RBF神经网络、Khan等[4-5]基于神经网络理论、蔡烽等[6]基于相空间重构技术,实现了舰船运动的极短期预报;朱齐丹等[7]研究了在舰尾流干扰和航母运动情况下的飞行员操控特性,总结了在扰动下的控制规律;章卫国等[8]采用解析形式的模糊控制规则,对舰载机纵向自动着舰控制系统进行了设计与仿真;袁锁中等[9]根据着舰运动及H∞控制方法的概念,对自动着舰导引系统进行了设计与仿真。然而在舰机适配性研究中,同时还需关注与舰载机起降限制因素相关的研究,通过分析限制因素对舰载机起降的影响,可以指导航母航行过程中选取有利于舰载机起降的航速和航向,并为航母设计过程中的耐波性优化指明方向。美国经过多年的积累,提出了CV/CVN甲板运动限制准则,其中不同海况下的作业难度不同,对于极限衡准需通过很大的努力才能完成起降作业[10]。本文将从航母运动角度出发,分析单一限制因素在不同有义波高下对舰载机起降作业的限制区域,提出不同浪向下的主要限制参数,为航母开展基于舰载机起降作业的耐波性优化提出明确的目标。
1 航母运动预报
航母运动预报采用STF切片理论,假定航母的横向运动和纵向运动相互独立。6个自由度运动耦合的线性微分方程为

式中:Mjk为质量矩阵;Ajk为附加质量矩阵;Bjk为阻尼系数矩阵;Cjk为恢复力系数矩阵;ξk为运动位移;Fj为波浪扰动力。
将Mjk,Ajk,Bjk和Cjk代入运动方程可以看出,对于横向对称的船,六自由度的运动方程变成了2组方程。
第1组为纵荡、垂荡和纵摇的3个耦合运动方程:

第2组为横荡、横摇和艏摇的3个耦合运动方程:

上式中的水动力系数和波浪扰动力(矩)可以通过计算每个船体剖面上的受力并沿船长方向积分得到。
对式(2)~式(7)求解,可以得出船体六自由度运动的频率响应函数fj(ω)。根据频率响应函数,可由式(8)和式(9)求出船体六自由度运动在不规则波中的运动谱Sj(ω)和方差值m0j。

式中:H1/3为有义波高;T01为特征周期;ω为波浪圆频率。
运动方差确定后,假定运动谱为狭谱,船体的第j模式运动的单幅有义值

根据美国“尼米兹”级航母的图片资料进行航母船型设计(图1)。以此船型为对象进行全航速(0~30 kn)、全浪向(0°~360°)运动预报,以及部分工况下的模型试验验证。其中海浪谱采用ITTC双参数谱

预报有义波高H1/3=4,5和6 m,对应的平均周期分别为8.3,9.1和9.8 s。

图1 型线图Fig.1Ship's lines
数值预报与模型试验得到航速18 kn、艏斜浪150°下的垂荡、纵摇和横摇运动响应幅值算子对比(图2),两者吻合较好,说明采用STF切片理论预报航母运动具有较高的预报精度。图中,k为波数,ζa为波幅λ为波长,L为船长,Z为垂荡位移,θ为纵摇角,φ为横摇角。
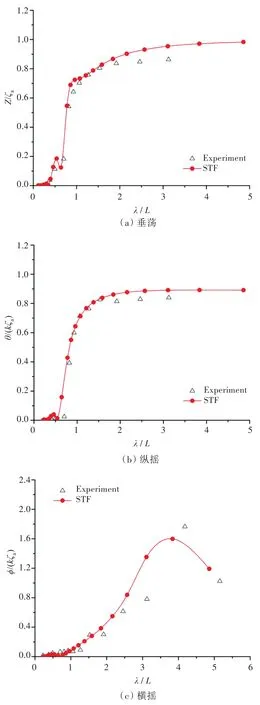
图2 运动响应幅值算子Fig.2Response amplitude operator
2 甲板运动准则
张勇等[10]对美国舰载航空甲板运动准则的形成及演变进行了较详细的阐述,其中更新的甲板运动准则包括无约束使用值和航空使用限制值,本文分析高海况下的舰载机起降能力,因此采用其中的航空使用限制值作为准则,具体如表1所示,其中,Tφ和Tθ分别为横摇平均周期和纵摇平均周期。

表1 CV/CVN甲板运动限制准则Tab.1CV/CVN limiting deck motion criteria
基于表1中各项运动参数分析限制舰载机起降作业的区域时,首先利用STF切片理论对全航速、全浪向下的航母运动进行预报,然后利用f(Vi'θj)≤fcritical进行判断,若成立,则该航速、浪向组合下的航母运动满足舰载机起降要求,否则该航速、浪向组合为限制点,最后全航速、全浪向的限制点形成限制区域,并计算限制区域面积与总面积的比值得到作业区域占比。
3 不同海况下的限制因素分析
3.1基于单一运动参数的舰载机起降作业区域分析
采用Visual Basic语言实现了舰载机起降作业区域的极坐标图形显示,如图3~图7所示,其中绿色区域为航母运动满足甲板运动限制准则中相关参数的限制要求,图中径向为航速、周向为浪向角(180°为迎浪)。
从图3可知,当有义波高H1/3=4,5和6 m时,本舰的横摇在高速艉斜浪60°和300°区域附近,不满足甲板运动限制准则。随着有义波高增加,本舰横摇幅值增大,限制舰载机起降作业的区域逐渐扩大。
从图4可知,当有义波高H1/3=4和5m时,全航速、全浪向范围内的坡道水平位移均较小,满足甲板运动限制准则,不影响舰载机起降作业。当有义波高H1/3=6m时,高速艉斜浪60°~30°和300°~330°区域附近的坡道水平位移幅值超出甲板运动限制准则,限制舰载机起降作业。

图3 横摇限制区域Fig.3Restricted region for roll


图4 坡道水平位移限制区域Fig.4Restricted region for slope's horizontal displacement
从图5可知,当有义波高H1/3=4和5 m时,全航速、全浪向范围内的坡道垂直位移亦较小,满足甲板运动限制准则,不影响舰载机起降作业。当有义波高H1/3=6 m时,艏斜浪150°至艉斜浪60°和艏斜浪210°至艉斜浪300°区域附近的坡道垂直位移幅值超出甲板运动限制准则,限制舰载机起降作业。由于横浪90°和270°时,纵摇很小,而且航母的垂荡是由横浪向艏艉斜浪逐渐减小,因此,在有义波高H1/3=6 m时,引起坡道垂直位移超出甲板运动限制准则的主要因素为航母垂荡。

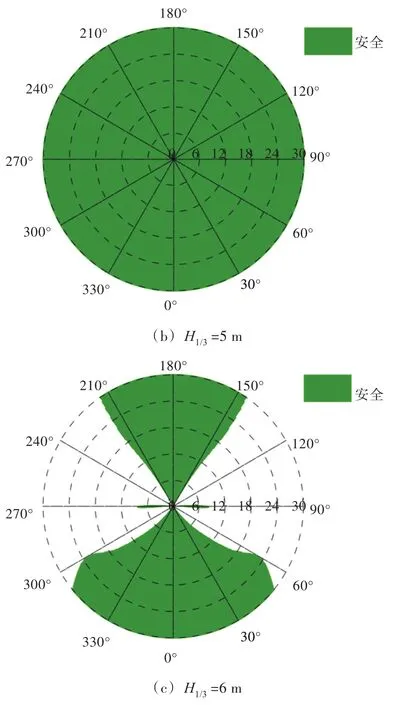
图5 坡道垂直位移限制区域Fig.5Restricted region for slope's vertical displacement
从图6可知,当有义波高H1/3=4 m时,全航速、全浪向范围内的纵摇满足甲板运动限制准则,不影响舰载机起降作业。当有义波高H1/3=5 m时,艏斜浪120°和240°区域附近的纵摇超出甲板运动限制准则,限制舰载机起降作业。当有义波高H1/3=6 m时,由于纵摇幅值增大,限制舰载机起降作业的区域进一步扩大,在迎浪和艏斜浪区域中仅横浪90°及低速迎浪180°区域附近满足甲板运动限制准则。


图6 纵摇限制区域Fig.6Restricted region for pitch
从图7可知,当有义波高H1/3=4 m时,全航速、全浪向范围内的触舰点垂直速度均较小,满足甲板运动限制准则,不影响舰载机起降作业。当有义波高H1/3=5 m时,艏斜浪120°至横浪90°和艏斜浪240°至横浪270°区域附近的触舰点垂直速度幅值超出甲板运动限制准则,限制舰载机起降作业。当有义波高H1/3=6 m时,限制舰载机起降作业的区域进一步向艏斜浪150°和210°扩大。与坡道垂直位移类似,引起触舰点垂直速度超出甲板运动限制准则的主要因素为航母垂荡。


图7 触舰点垂直速度限制区域Fig.7Restricted region for aircraft carrier landing position's vertical velocity
3.2航母耐波性与舰载机起降综合分析
通过3.1节的分析可知:
1)当有义波高H1/3=4 m时,航母运动较小,对舰载机起降作业基本上没有影响;随着有义波高增加,甲板运动限制准则中各项参数的限制性逐渐显现。
2)横摇和坡道水平位移主要在高速艉斜浪区域限制舰载机起降,且两者的限制区域基本重叠,横摇的限制区域略大。
3)纵摇主要在迎浪和艏斜浪区域限制舰载机起降,当有义波高H1/3达到6 m时,纵摇在迎浪和艏斜浪的限制区域较大。
4)坡道垂直位移和触舰点垂直速度都是受航母的垂荡影响较大,而且对舰载机起降作业的限制区域都是以横浪为中心向艏艉斜浪扩展;当有义波高H1/3=6m时,坡道垂直位移的限制区域涵盖了触舰点垂直速度的限制区域,但当有义波高H1/3=5 m时,触舰点垂直速度对舰载机起降作业的限制作用更加明显。
各单项参数在有义波高H1/3=6 m下对舰载机起降作业的限制范围汇总,如表2所示。
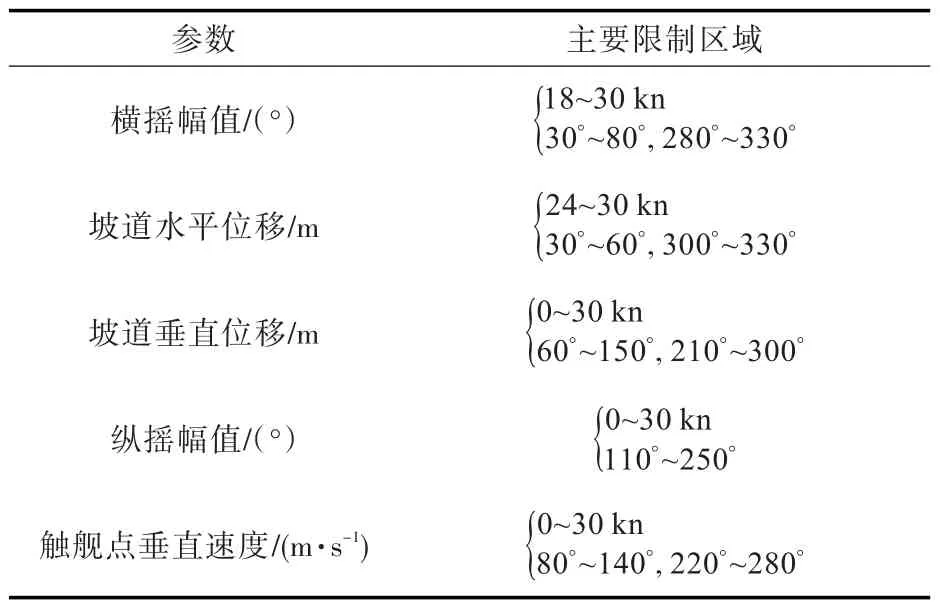
表2 单项参数的主要限制区域(H1/3=6 m)Tab.2Primary restricted region of single parameter(H1/3=6 m)
综合各项参数对舰载机起降作业的影响,当有义波高H1/3=6 m时,以本船运动及CV/CVN甲板运动限制准则来评判舰载机起降区域,仅低速迎浪区域以及全航速的艉斜浪30°/330°至顺浪0°区域具备舰载机起降作业的条件(图8)。

图8 甲板运动准则综合限制区域(H1/3=6 m)Fig.8Compositive restricted region for CV/CVN limiting deck motion criteria(H1/3=6 m)
3.3运动参数对舰载机起降作业敏感性的影响
由于耐波性优化涉及纵摇、横摇、垂荡等多个运动参数,而各项运动参数在优化过程中往往相互制约,因此通过分析单项运动参数影响舰载机起降的敏感性,并以此作为优化过程中的主要优化目标,从而最大程度地扩大舰载机起降区域。
假设通过单目标优化[11]可令有义波高为6 m时的航母某项运动减小10%(如横摇幅值减小10%或坡道水平位移减小10%等),则此时对舰载机起降作业限制区域的影响如表3所示。其中,起降区域占比为非限制区域与全航速、全浪向区域的百分比。从表3可知,在影响舰载机起降的运动参数中,纵向运动的敏感度较高,其中坡道垂直位移的敏感度最高。

表3 运动参数敏感性Tab.3Sensitivity of motion parameters
4 结语
本文根据美国“尼米兹”级航母的图片资料进行船型设计,逐项分析了高海况下航母运动参数与甲板运动限制准则的适配情况。研究表明,迎浪和艏斜浪区域的主要限制参数为纵摇、坡道垂直位移与触舰点垂直速度;横浪区域的主要限制参数为坡道垂直位移与触舰点垂直速度;艉斜浪区域的主要限制参数为横摇与坡道垂直位移。
通过分析影响舰载机起降运动参数的敏感性,发现纵向运动的敏感度较高,其中坡道垂直位移的敏感度最高。在航母为刚体的假设下,坡道垂直位移主要是由航母垂荡和纵摇耦合引起的。鉴于此,为最大程度地扩大高海况下舰载机起降作业的区域,在航母设计过程中需重点针对纵摇和垂荡开展优化设计。然而,对于航母而言,改善航母运动的措施十分有限,如何降低航母纵向运动,也是后续研究的重要方向。
[1]段文洋,王瑞锋,赵良明,等.基于AR预报的船舶减摇模拟分析[J].武汉理工大学学报,2014,36(3):59-63. DUAN Wenyang,WANG Ruifeng,ZHAO Liangming,et al.Simulation of ship stabilizing fin control based on AR forecasting[J].Journal of Wuhan University of Technology,2014,36(3):59-63.
[2]LIN Z,YANG Q,GUO Z Q,et al.An improved autoregressive method with kalman filtering theory for vessel motion predication[J].International Journal of Intelligent Engineering and Systems,2011,4(4):11-18.
[3]顾民,刘长德,张进丰.基于混沌理论与RBF神经网络的船舶运动极短期预报研究[J].船舶力学,2013,17(10):1147-1152. GU Min,LIU Changde,ZHANG Jinfeng.Extreme short-term prediction of ship motion based on chaotic theory and RBF neural network[J].Journal of Ship Mechanics,2013,17(10):1147-1152.
[4]KHAN A,BIL C,MARION K E.Theory and application of artificial neural networks for the real time prediction of ship motion[M]//KHOSLA R,HOWLETT R J,JAIN L C.Knowledge-Based Intelligent InformationandEngineeringSystems.Berlin:Springer,2005:1064-1069.
[5]DE MASI G,BRUSCHI R,GAGGIOTTI F.Short term vessel motion forecasting based on wavelet neural network for wave feed-forward dynamic positioning[C]// Proceedings of the Twenty-Second(2012)International Offshore and Polar Engineering Conference. Rhodes,Greece:International Society of Offshore and Polar Engineers,2012.
[6]蔡烽,万林,石爱国.基于相空间重构技术的舰船摇荡极短期预报[J].水动力学研究与进展,2005,20(6):780-784. CAI Feng,WAN Lin,SHI Aiguo.Extreme short term prediction of ship motions based on phase-space reconstruction[J].Journal of Hydrodynamics,2005,20(6):780-784.
[7]朱齐丹,赵恩娇,张雯,等.飞行员着舰纵向控制研究[J].计算机仿真,2013,30(5):112-116. ZHU Qidan,ZHAO Enjiao,ZHANG Wen,et al. Study on pilot longitudinal control in carrier landing[J].Computer Simulation,2013,30(5):112-116.
[8]章卫国,薛璞,杨向忠,等.舰载机自动着舰模糊控制系统的设计[J].飞行力学,1997,15(2):33-37. ZHANG Weiguo,XUE Pu,YANG Xiangzhong,et al. Design of fuzzy control systems for aircraft’s auto-landing on carrier[J].Flight Dynamics,1997,15(2):33-37.
[9]袁锁中,杨一栋.舰载飞机着舰精确轨迹跟踪控制研究[J].飞行力学,2000,18(1):22-25. YUAN Suozhong,YANG Yidong.Precision flight path control in carrier landing approach[J].Flight Dynamics,2000,18(1):22-25.
[10]张勇,周益.美国舰载航空甲板运动准则[J].中国舰船研究,2012,7(1):7-11. ZHANG Yong,ZHOU Yi.Deck motion criteria for flight operations aboard USN aircraft carriers[J].Chinese Journal of Ship Research,2012,7(1):7-11.
[11]刘畅,朱仁庆,杨松林.船舶耐波性模糊优化方法研究[J].华东船舶工业学院学报(自然科学版),2002,16(6):12-17. LIU Chang,ZHU Renqing,YANG Songlin.Study on the fuzzy optimization methodology of ship’s seakeeping performance[J].Journal of East China Shipbuilding Institute(Natural Science Edition),2002,16(6):12-17.
Restricted regions and main influence parameters for the takeoff and landing of carrier-based aircrafts
JIN Wenchao1,LI Peng2,LI Yajun2,QIU Liaoyuan2
1 Naval Academy of Armament,Beijing 100161,China
2 China Ship Development and Design Center,Wuhan 430064,China
The takeoff and landing capability directly reflects the fighting capability of an aircraft carrier. A notional aircraft carrier was designed according to pictures of the American Nimitz-class aircraft carrier. The motion was predicted theoretically by the STF method,and then a criterion function established with CV/CVN limiting deck motion criteria was used to analyze ship motion.The program visually displayed the restricted region induced by the aircraft carrier's motion and non-restricted region with a polar plot.Based on the self-characteristics of aircraft the carrier's motion,the influence of each parameter on the takeoff and landing of carrier-based aircraft was analyzed item by item.The study presents the primary parameter restricting takeoff and landing for different wave directions.It also analyzes the sensitivity of motion on takeoff and landing.As such,it shows the optimization orientations clearly for improving the seakeeping capacity and enlarging the non-restricted region in the design process of aircraft carriers.
aircraft carrier;carrier-based aircraft;seakeeping capacity;restricted region
U661.3
A
10.3969/j.issn.1673-3185.2016.05.005
2016-01-17网络出版时间:2016-9-21 13:45
国家部委基金资助项目
晋文超,男,1985年生,博士,工程师。研究方向:舰船总体研究与设计
李鹏(通信作者),男,1985年生,硕士,工程师。研究方向:舰船航行性能研究。
E-mail:lp0125@163.com
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年10期)2022-06-17
中国注册会计师(2021年10期)2021-11-22
船海工程(2021年4期)2021-08-17
船舶标准化工程师(2020年1期)2020-06-12
船舶标准化工程师(2020年1期)2020-06-12
宇航学报(2019年5期)2019-06-05
消费导刊(2017年24期)2018-01-31
国防(2017年12期)2017-04-09
共产党员(辽宁)(2015年24期)2015-10-18
