
狭小工作舱布局优化方法
2016-11-03 05:25范文王军锋
中国舰船研究 2016年5期
范文,王军锋
1大连民族大学设计学院,辽宁大连116600 2西北工业大学陕西省工业设计工程实验室,陕西西安710072
狭小工作舱布局优化方法
范文1,王军锋2
1大连民族大学设计学院,辽宁大连116600 2西北工业大学陕西省工业设计工程实验室,陕西西安710072
针对狭小工作舱作业空间小、时间长、无舒适性的特点,提出一种基于人体疲劳特性的布局优化方法用来减轻肌肉疲劳。首先,利用实验所得人体上肢肌肉疲劳特性值,建立三维人体运动学模型。然后,以坐标变换的方法建立手指空间坐标求解思路,得到全局坐标系中不同位置的疲劳特性值,实现人体上肢作业姿势的生理参数化定义。同时,采用专家评价法与层次分析法相结合,确定待布物的人机权重。最后,以载人潜航器舱室为例,结合蚁群算法对载人潜航器舱内主控台进行布局设计,并采用JACK软件进行模拟验证。结果表明,此布局优化方法可以缓解载人潜航器操作员的疲劳,改善载人潜航器舱室的人机环境。
人机工程学;人体疲劳特性;狭小工作舱;布局优化;蚁群算法
网络出版地址:http://www.cnki.net/kcms/detail/42.1755.TJ.20160921.1348.034.html期刊网址:www.ship-research.com
引用格式:范文,王军锋.狭小工作舱布局优化方法[J].中国舰船研究,2016,11(5):19-27.
FAN Wen,WANG Junfeng.Layout optimization method for narrow working cabins[J].Chinese Journal of Ship Research,2016,11(5):19-27.
0 引言
狭小工作舱不仅空间窄小,而且舱内作业任务特殊,要求作业员长时间保持坐姿,只有上肢能在小范围内活动。如此苛刻的环境毫无适居性。长期在这种环境下作业,会引起肌肉疲劳,从而产生与工作相关的肌肉骨骼疾病[1]。
狭小工作舱的布局属于人机布局问题。早期人机布局主要采用问卷调查法进行布局设计改进。近年来,为了在提高生产率的同时达到符合人体工学的布局设计方案,大部分的人机布局设计是使用现有的人机工效学准则进行数学描述并直接应用于算法中[2-6]。然而,现有的人机工效学准则以人体舒适度为基础,对狭小工作舱这种特殊的工作空间用人体肌肉的疲劳特性为准则更加合适。虽然目前已有一些软件如Delmia[7-8]和CATIA[9]等可以模拟人的动作和视域范围,评价人的疲劳度,但是这些软件都是在舒适度的基础上评价姿势,对于疲劳的评价也是关于一个动态动作的,没有静态姿势和具体部位。
以肌肉疲劳特性为依据的布局方法,可以尽可能地减轻工作对狭小工作舱作业员所带来的肌肉疲劳,从而缓解其作业疲劳。本文将以载人潜航器为例,模拟人体在载人潜航器中的工作姿势,采用表面肌电仪,研究上肢肌肉的疲劳特性,并以此为依据建立三维空间人体疲劳特性模型,结合蚁群算法,对载人潜航器舱室进行布局优化设计。本文提出的狭小工作舱布局优化方法也适合应用于工作性质类似于狭小工作舱的其他大空间的布局优化设计中。
1 狭小工作舱人体肌肉疲劳测试及分析
1.1实验设定
实验设定的目的是为了探索建立三维空间人体疲劳特性模型数据基础的实验方法。正交实验作为研究多因素、多水平的高效、快速、经济的实验方法,具有“均匀分散性,整齐可比”两大优越性。目前,正交实验早已大量应用于人机工程方面的研究中[10]。为了搭建三维人体空间疲劳特性模型,需要肌肉疲劳角度下的大量肌肉疲劳数据。为了将实验简化,又能得到合理结果,在研究肌肉疲劳时,面对大量关节角度和肌肉疲劳测试,利用正交实验从大量的数据中挑选出适合的、有代表性的点,将实验因素列出后,分别进行正交实验,以取得各个关节角度下肌肉疲劳速度的快慢,再通过计算得到肌肉在任意角度下的疲劳特性值。
本文将针对狭小工作舱作业员的工作姿势,搭建实验环境,模拟其工作姿势,采用表面肌电仪进行数据采集。由于狭小工作舱内工作环境的特殊性,作业员的活动区域局限在座椅之上,只有颈部和手臂可以自由活动。其中,影响手臂疲劳的主要工作状态是静止状态和反复操作2种;而影响颈部疲劳的主要以静止状态为主。因此,对作业员的上肢分别进行静态和动态肌肉疲劳监测,对颈部进行静态肌肉疲劳监测。
1.2实验过程
每组实验都记录受试者从开始直到完全疲劳时的肌电信号。同时,在测试过程中采用运动自觉量表(Rating of Perceived Exertion,RPE)进行问卷调查,并记录时间。受试者进行相邻两实验之间休息30 min(由预实验经验所得时间),以便使肌肉恢复。由于实验量非常大,受文章篇幅所限,本文只对上肢静态肌肉疲劳实验进行描述,并以上肢静态肌肉数据为例进行分析。
1)样本量的选择。样本量的计算公式为

式中:σ为样本标准偏差;μ为平均值;u与v分别为置信区间的上界和下界,可以通过界值表查得。根据Qi等[11]的研究,查得平均功率频率(Mean Power Frenquency,MPF)值的标准偏差及平均值,将其代入式(1)中,可得N=6.72。关于RPE样本量的选择,根据Qi等[11]的研究,当主观RPE样本量达到14时,即可获得显著性分析P<0.05的结果。因此,本文将样本量定为15,即可达到疲劳效应显著的效果。
2)为保证适合狭小工作舱的工作环境,要求受试者身高为168~180 cm,坐高为90~93 cm。因为测试时主要以右手为主,所以为保证测量数据没有太大的偏差,受试者均选择右利手的人群,且受试者上肢、颈部肌肉没有肌肉、骨骼相关的疾病史,实验近期无损伤,正式实验前72 h无剧烈运动,以避免身体疲劳影响测量结果(身高、体重为实验当天数据)。
3)作业员上臂的活动范围:根据狭小工作舱内的工作姿势,确定作业员上臂的活动范围。表1为根据正交实验所得的上肢实验顺序表。
4)根据狭小工作舱作业员的工作姿势,上肢姿势主要监测的肌肉包括斜方肌、三角肌(中部)、三角肌(前部)以及肱桡肌。
5)根据作业员的工作特点可以看出,作业员的身体处于低负荷、长时间的工作状态。因此,在实验过程中,采用30%最大肌力(Maximal Voluntary Contraction,MVC)的负荷让受试者进行模拟,直到最终完全疲劳。
6)根据狭小工作舱需要长时间保持某种姿势的工作性质,在进行上臂静态肌肉疲劳实验时,要求受试者按实验设定保持某个动作直至疲劳。实验过程如图1所示。

表1 上肢实验表Tab.1Upper limb experiment

图1 实验过程Fig.1Experimental process
1.3数据采集和处理
本文实验是基于芬兰产MegaWin6000肌电测试仪(频率2 000 Hz)进行表面肌电信号的获取。采用Matlab R2010b对表面肌电信号进行小波分析[11],依次比较并进行肌肉疲劳分析。以上肢静态疲劳实验为例,实验结果如表2所示。
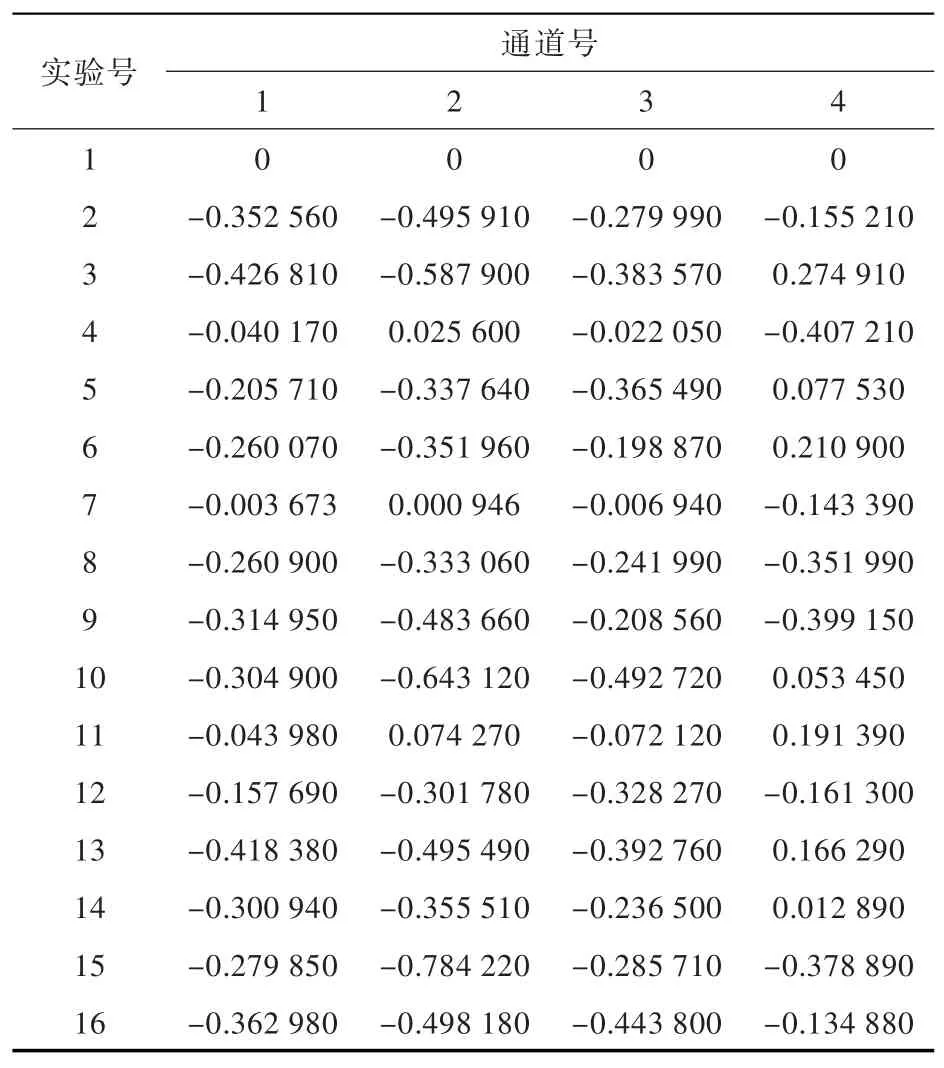
表2 上肢静态疲劳实验MPF平均斜率Tab.2MPF average slope of upper limb static fatigue experiment
由表2可知:
1)第1通道斜方肌:从实验4,7和11可以看出,没有外展角度的动作最不容易产生疲劳。
2)第2通道三角肌(中部)的疲劳速度主要由手臂外展角度决定,手臂外展角度大,则三角肌(中部)疲劳速度快。对于没有外展动作的实验4,7和11几乎看不出疲劳趋势,即很难达到疲劳。
3)由第3通道三角肌(前部)MPF值可以看出,单纯的肘关节活动时,三角肌(前部)的MPF值斜率绝对值越大,其疲劳速度越快。
4)由第4通道肱桡肌的MPF值平均斜率绝对值大小可以看出,手腕的活动角度大,则MPF值斜率绝对值大,肱桡肌的疲劳速度快。同时,在手腕活动角度大小相同的情况下,手腕向外活动给肱桡肌带来的疲劳比手腕向内活动带来的疲劳速度快。
5)对静态肌肉疲劳实验时间通过T-检验进行分析,也就是将除实验4,7和11之外的数据分别与实验4,7和11所得数据进行双样本异方差分析。结果发现:与实验4对比所得P值均在1.815 3×10-11~4.384 5×10-11之间;与实验7对比所得P值均在4.149 8×10-15~8.116 6×10-15之间;与实验11对比所得P值均在9.373 6×10-16~1.975 3×10-14之间。由此可以看出,实验4,7和11完成的时间明显大于其他组实验所得的疲劳时间。
2 待布空间的人体疲劳特性求解
2.1实验项疲劳特性值求解
对于上肢静态实验,共有16组,其疲劳特性值为Y=(Y1'Y2'...'Y16)。因第1组实验都处于完全伸展状态,因此可假设Y1=0;对于其他实验项,首先采用层次分析法计算出各肌肉的权重,然后将实验数据D与肌肉权重结合即可计算出对应的疲劳特性值。

式中,ω1'ω2'ω3'ω4分别为实验中4块肌肉的权重。在上臂肌肉持续性疲劳实验中,各实验参数与所对应疲劳特性值如表3所示。

表3 上肢静态实验参数与疲劳特性值Tab.3Static experimental parameters and fatigue properties of upper limb
2.2未实验项疲劳特性值求解
在求得实验项的疲劳特性值后,可根据正交特性求解出其他未进行实验的组合下的疲劳特性值。假设

式中:μ为各肌肉在某一水平下的疲劳特性值;εj(j=1'2'…'16)是一组相互独立且服从N(0,δ2)的随机变量;ai'bi'ci'di(i=1'2'3'4)分别为因素肩关节前伸角度、肩关节外展角度、肘关节弯曲角度、腕关节弯曲角度各水平的效应,且满足以下关系:
采用正交算法可计算得出各参数的无偏估计值,各参数无偏估计值即代表4块肌肉在不同水平下的参数值,与平均值一起可计算出实验外所有水平组合下的疲劳特性分数。设任意组合下的肩关节前伸角度、肩关节外展角度、肘关节弯曲角度与腕关节弯曲角度对应的水平分别为s1's2's3's4,则该组合下的疲劳特性分数为


对于某一特定的人体姿势,分别求解出上肢与颈部的疲劳特性值Yu和Yn后,将其进行线性加权即可得到该姿势的疲劳特性值。
式中,α,β为加权系数。
2.3构建人体三维空间疲劳特性模型
由人体测量学尺寸数据可知人体坐姿肩高h和肩宽s尺寸,根据h与s可得到左右肩关节在全局坐标系中的坐标。假设以人体标准坐姿构建人体模型的各坐标系,x,y,z三轴遵守右手法则。肩关节的外展与前伸动作分别为绕x1'z1这2个坐标轴的旋转角度α1'α2,旋转后沿z1轴平移上臂长Lu可得肘关节坐标。变换矩阵为
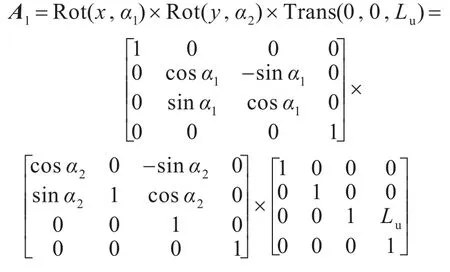
令a=sin α1,b=cosα1,c=sin α2,d=cosα2,Lu=Lu。在Matlab中定义常量,可得出变换矩阵

同理,可得到腕关节坐标和掌心坐标。由肩关节坐标及上述变换矩阵可得到不同身高、尺寸人体在不同关节角度下,手指位于全局坐标系内的空间坐标。结合前文计算得出的不同关节角度下的疲劳特性数值,可得到全局坐标系中不同空间位置的疲劳特性值。由实验设计可知,不同组合的数量为44=256。空间疲劳特性示意图如图2所示,其中圆点大小表示空间点的疲劳特性值大小。圆点大的表示该坐标点的空间疲劳特性值大;圆点小的表示该坐标点的空间疲劳特性值小。

图2 空间疲劳特性示意Fig.2Spatial fatigue characteristics
3 基于人体疲劳特性的布局优化方法
3.1待布物的人机权重确定
根据评估与设计对象的分类,并按照其使用频率、操作方式、操作顺序和功能重要性进行分级,构建布局评估与设计对象层次目标树。根据建立的评估与设计对象层次目标树,邀请专家组对其相对重要性进行评定,进而进行权重配比。
1)专家权重确定。
由于专家的专业水平对评估对象的重要性判定有着至关重要的作用,因此必须先对专家进行权重判定。传统的评估方法中,专家的权重往往直接由层次分析法主观评估得出,主观影响较大。因此,本文将在层次分析法的基础上,结合灰色理论,提出一种修正权重判定法。
本方法将群决策按照参考序列来处理,而评价专家则视为比较序列,通过计算各个专家的灰色关联度,分析单个专家的决策结果与群决策的一致程度。与群决策一致度越高的专家,对群决策的影响越大,权重也就越大。
选取某狭小工作舱的设计方案进行评估,假设设计方案集N={N1'N2'…'Nm}、评价属性集P'={P1''P2''…'Pn'},对应属性Pj'的权重为ωj,其中,参与决策的专家E=(E1'E2'…'Es)。具体步骤如下:
(1)通过层次分析法确定专家Ek的权重为wk,其中专家决策矩阵为初次通过层次分析法确定专家权重和属性权重后,计算出单个专家对于方案Ni(i=1'2'...'m)的得分

并易知方案Ni的群决策得分为

(2)聘请专家采用分级评分法分别对各个属性进行两两比较,得到判断矩阵,专家Ek给出的判断矩阵为Ak(k=1'2'…'s),所有专家的决策结果视为参考序列μ0,单个专家决策视为比对序列μk。
(3)计算专家个体决策μk(k=1'2'…'s)与专家群体决策μ0之间的关联系数,即

(4)通过灰色系统理论,计算专家群体决策与专家个体决策之间的关联系数,即
(5)调整专家个体权重,即

得到新的专家权重之后,通过与式(3)合并计算得到新的群决策结果。易知群体新的决策得分与初始群决策得分μ0的距离为

根据实际情况设定理想的阈值ε,若L(μ0'μ0′)≤ε,则说明调整的结果偏差能够达到决策的满意范围,认为调整结果趋于稳定,可以停止调整权重,即调整结束,并将μ0′作为最终决策结果;否则,令μ0=μ0′,wk=wk′,重复以上调整步骤,直至得到满足阈值要求的结果。易知以上根据灰色关联度作为专家权重调整值的方法,必将导致调整算法的收敛,因此本方法具有很好的实用性。
2)多级对象权重判定。
对专家进行权重判定后,采用主观评分法对目标树中的各级对象进行评分,得到各级评分矩阵C。将评分矩阵与专家权重矩阵相乘,得到各对象的实际得分矩阵G。

构建对应于评估与设计对象层次目标树的判断矩阵D'(n),其中dij=gi/gj。采用层次分析法计算矩阵的排序权值,根据独立权重自顶向下逐层计算各级的整体权重,最终得到各叶子节点对应指标的整体权重。
3.2待布空间人机约束及权重计算
根据工作人员在舱内的工作状态,要考虑的人机约束很多。根据人机工程学相关知识,对操作界面进行大致划分,建立约束层次目标树。根据建立的人机约束层次目标树,邀请专家群体对各约束尺寸的相对重要性进行评定,构建判断矩阵后,计算矩阵的排序权值和二级指标的综合权重值。
在得到各区域的权重结果后,分别对各个区域进行二次划分,划分的尺寸依实际情况而定,划分得越精细,所得结论越精确。划分完成后,将待布物所赋予的不同人机权重值(含疲劳特性值),对视域相关区域内各单元所对应的颈部疲劳特性值进行求解,对操作相关区域内各单元进行上肢持续性操作疲劳特性值和上肢反复性操作疲劳特性值的求解。疲劳特性值越高,则说明该区域越不利于操作,因此,将疲劳特性值以倒数的形式与各区域的权重进行叠加,得到各划分单元的权重。例如,对于最佳视域中的某单元,其颈部疲劳特性值为Yi,则令其最终权重为ω'=ω11/Yi。
3.3布局优化算法
设t时刻位于待布物i的蚂蚁数目为bi(t),t时刻路径(i'j)上的信息量为τij(t),待布物规模为n,蚂蚁的数目为m,则设初始时刻各路径上的信息量相等τij(0)=const,随后蚂蚁k(k=1'2'...'m)依次漫步所有的特征。在此过程中,通过感受各条路径上的信息量决定其转移方向。
禁忌表tabuk(k=1'2'...'m)里记录了当前蚂蚁k所走过的待布物。t时刻蚂蚁k由待布物i转移到待布物j的状态转移概率为:
式中:蚂蚁k下一步允许选择的待布物为Ek;信息启发式因子α表示轨迹的相对重要性,它由蚂蚁们运动时所积累的信息素决定,α值越大,说明走这条路径的蚂蚁越多,这条路越容易被其他的蚂蚁选中;期望启发式因子β表示能见度的相对重要性,β值越大,说明蚂蚁选择路径时越容易受启发信息的影响,文中将β值设为1;ηij(t)表示蚂蚁从待布物i转移到待布物j的期望程度。
启发函数ηij(t)表达式如下:

式中,(Di-Dj)为待布物i与j的人机特性值的差值。(Di-Dj)越小,ηij(t)越大,也越大。对蚂蚁k而言,(Di-Dj)越小说明待布物j的人机特性值越接近待布物i。若Di-Dj=0,则直接选择待布物j作为下一个待布物。本文要求在布局优化开始时,选择权重值最大的待布物作为t=0时刻蚂蚁所位于的待布物。
蚂蚁每完成一个待布物的转移,都要对残留信息进行更新处理,留下新的信息素。由此,蚂蚁按式(7)所示规则进行信息素的更新。

式中:信息素挥发系数ρ值越大,说明在迭代过程中的信息素蒸发得越慢;Δτij(t)表示本次循环中信息素的增量,初始时刻(t=0)信息素的增量为0。
根据布局优化问题的具体情况,在基于人体疲劳特性的蚁群算法中,人机特性(含人体疲劳特性值)考虑在信息素更新策略中,将待布空间根据人的生理特性得到不同的人机特征值,信息素根据式(8)进行更新。
几何约束主要是讨论待布物互不干涉的数学描述形式。要使待布物之间不发生干涉,只要满足待布物不在前面已布置的面积内即可。即设矩形左上角的点坐标为(x1'y1),右下角的点坐标为(x2'y2),需要判断的点坐标为(x0'y0)。判断点(x0'y0)是否在矩形内,只需要做如下判断:
蚁群算法实现人机布局优化的步骤如下:
1)对蚂蚁数量、初始信息素等参数初始化。
2)取权重值最大的待布物,判断其类别,若为显示类装置,则将其放置在权重最大的视域相关待布区域,持续性操作装置与反复性操作装置与此类似。根据式(7)记录信息素及物件坐标,并将此待布物移入禁忌表中。
4)重复步骤3),直至每只蚂蚁都将所有待布物布完。
5)当m只蚂蚁都完成所有待布物的布局后,从中选择所有待布物人机特征值之和最小的布局方案,作为更新全局信息素的路径。
6)持续迭代,直到没有可以替代的信息素值,即满足算法终止条件,得到最优方案。即
4 案例验证
以载人潜航器为例,对现有的潜航器舱室环境进行重新布局,详细布局流程框架如图3所示。

图3 布局优化流程Fig.3Layout optimization process
载人潜航器主控制台的总面积为1 500 mm× 700 mm,共有31个待布单元,待布物实际是按功能划分的长方形待布单元。根据建立的主控制台人机约束层次目标树,邀请由4位专家组成的专家群体对各约束尺寸的相对重要性进行评定,对应于主控制台人机约束层次目标树的3个判断矩阵。计算矩阵的排序权值,结果如表4所示。
由此,计算二级指标的综合权重值,如表5所示。
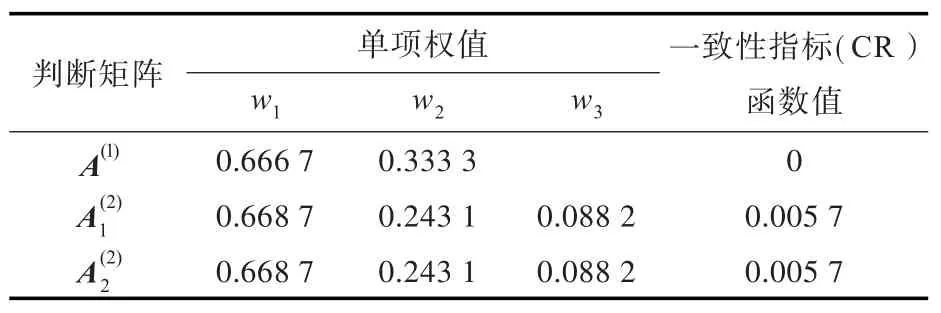
表4 计算结果统计表Tab.4Calculation results
综合比较表4的计算结果,各单项权值计算结果稳定;判断矩阵的一致性指标函数(Consistency Ratio,CR)值均小于0.10,具有满意的一致性。
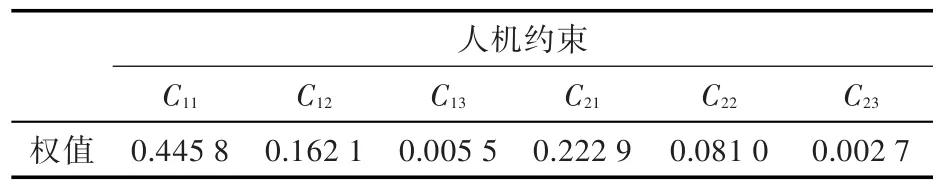
表5 二级指标综合权重计算结果Tab.5Results of the comprehensive weight of the second-level index
根据操作人员实际工作情况,采用坐姿人体尺寸标准。根据人眼在主控制面板水平面与垂直面内可觉察到的所有空间范围和人手在主操作面板水平面与垂直面可达到的作业情况,对各个区域进行划分。划分单位为1 cm,对各单元进行疲劳特性评估。以左上第1个单元为例,属于最大视域/可扩展操作区权重为采用前文疲劳特性值的求解方法,可求得该单元的上肢持续、反复操作及颈部疲劳特性值分别为:

则可求解出该单元的最终权重分别为:

采用蚁群算法进行自动布局,在优化过程中,蚁群规模为45,信息启发式因子α=0.7,期望启发式因子β=1.2,信息素挥发因子ρ=0.5,停止条件为相邻2次循环搜索中无可替换的信息素值。经过计算,所得布局结果如图4所示。
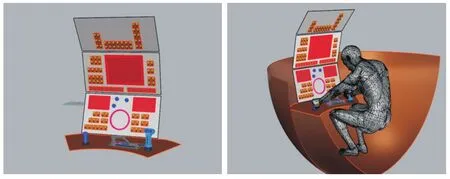
图4 最优解所得的载人潜航器主控台布局方案Fig.4The optimal solution of the deep submersible vessel cabin console layout design scheme
将最终所得布局方案进行模拟实验并采用Jack软件模拟验证。
1)让受试者在不承受任何负荷的情况下,对布局前、后的情况进行模拟(图5),并收集5 min的表面肌电信号。从5 min的表面肌电信号来看,虽然不会达到疲劳,但布局优化前动作所采集到的肌电信号振幅大于优化后的肌电信号强度。这说明优化前的姿势所调动的肌纤维多,姿势强度相对大于优化后的姿势强度。因此,布局优化前的动作更容易造成人体疲劳。

图5 布局优化前后表面肌电信号对比实验Fig.5Comparison of surface EMG signals before and after layout optimization

图6 Metabolic energy expenditure工具Fig.6Metabolic energy expenditure tool
2)Jack软件中提供了多种人机工效分析工具,其中的Metabolic energy expenditure工具(图6)能够分析得出人体在进行既定操作时的能量消耗情况,能在一定程度上反映疲劳特性。将潜航器模型导入Jack软件中,运用Metabolic energy expenditure工具进行分析。
制定2组操作流程,模拟操作人员对原布局方案和改进方案的操作,比较在2种布局空间内完成同样2组流程时操作人员所消耗的能量。
A流程:机械手供电区→长基线→航行控制操作盒→浅浮抛载→综合信息显示器→信息显控计算机→综合选择→载体运行→水下灯供电→机械手供电区。
B流程:泄露报警指示区→报警灯→备用区→应急操作→作业工作→控制系统上电区。
能量消耗分析如表6所示。由比较分析可知,新的布局方案在操作时更能减少疲劳。

表6 操作人员能量消耗Tab.6Energy consumption of the operator
从能量消耗上可以看出,优化后的布局减少了操作者的能量消耗,间接反映出该种布局不易造成操作者工作疲劳。
5 结语
本文从减轻人体肌肉疲劳的角度出发,采用人体肌肉疲劳实验获取人体肌肉疲劳特性值,以人体疲劳特性所建立的三维模型为基本数据,结合蚁群算法得到了狭小工作舱布局优化方法,并结合载人潜航器操控台进行实例验证。结果表明,本文所提出的布局方法在一定程度上确实能够减轻工作人员在载人潜航器舱室工作时的肌肉疲劳。本文方法可为今后深入研究在类似狭小工作舱工作环境(如造船厂管道内部焊接、流水线作业等作业姿势受空间限制或者需要长时间保持某种姿势的作业环境)中的作业姿势及作业时间提供一定的方法参考。
[1]BERNARD B P.Musculoskeletal disorders and workplace factors:a critical review of epidemiologic evidence for work-related musculoskeletal disorders of the neck,upper extremity,and low back[M].Cincinnati,OH,USA:National Institute for Occupational Safety and Health Publications Dissemination,1997:97-141.
[2]KUSHWAHA D K,KANE P V.Ergonomic assessment and workstation design of shipping crane cabin in steel industry[J].International Journal of Industrial Ergonomics,2016,52:29-39.
[3]GEORGIS N,PETROU M,KITTLER J.On the constrained rectangle packing problem[J].International Journal of Modelling and Simulation,2000,20(4):293-299.
[4]NAM J H,LE T H.Automatic interior space arrangementofmid-sizedsuperyachtsusingaconstraint-based genetic algorithm[J].Journal of Marine Science and Technology,2012,17(4):481-492.
[5]胡耀,姜治芳,熊治国,等.基于改进型遗传算法的舰船舱室布局优化[J].中国舰船研究,2014,9(1):20-30. HU Yao,JIANG Zhifang,XIONG Zhiguo,et al.Warship cabin layout design optimization based on an improved genetic algorithm[J].Chinese Journal of Ship Research,2014,9(1):20-30.
[6]宗立成,余隋怀,孙晋博,等.基于鱼群算法的舱室布局优化问题关键技术研究[J].机械科学与技术,2014,33(2):257-262. ZONG Licheng,YU Suihuai,SUN Jinbo,et al.Study on cabin layout optimization with fish algorithm[J]. Mechanical Science and Technology for Aerospace Engineering,2014,33(2):257-262.
[7]WANG W,SUN Y C,KONG F F.Analysis and study of ergonomics on virtual maintenance of civil airplane based on DELMIA[J].Advanced Materials Research,2008(44/45/46):821-828.
[8]ZÜLCH G.Evaluating human work in the digital factory-a new German guideline[M]//GRABOT B,VALLESPIR B,GOMES S,et al.Advances in production management systems:innovative and knowledge-based production management in a global-local world.Berlin Heidelberg:Springer,2014,440:35-42.
[9]YE Z H,LI X,LI Y.The virtual prototyping design and evaluation of ergonomic gymnastic based on CATIA[J].International Journal of Hybrid Information Technology,2013,6(5):67-78.
[10]曾庆国,王枫红,胡小强.基于正交试验的儿童安全座椅约束系统参数的优化设计[J].科学技术与工程,2012,12(22):5546-5550. ZENG Qingguo,WANG Fenghong,HU Xiaoqiang. The optimization design of child safety seats'restraint system parameters based on orthogonal experiment[J].Science Technology and Engineering,2012,12(22):5546-5550.
[11]QI L P,WAKELING J,GRANGE S,et al.Changes in surface electromyography signals and kinetics associated with progression of fatigue at two speeds during wheelchair propulsion[J].The Journal of Rehabilitation Research and Development,2012,49(1):23-34.
Layout optimization method for narrow working cabins
FAN Wen1,WANG Junfeng2
1 College of Design,Dalian Nationalities University,Dalian 116600
2 Shaanxi Engineering Laboratory for Industrial Design,Northwestern Polytechnical University,Xi'an 710072,China
According to such characteristics of narrow working cabins as small space,long working hours and lack of comfort,a method of upper limb posture assessment based on fatigue characteristics is proposed.First,using the fatigue characteristics of upper limbs from experiments,a 3D kinesiological model of the human body is built up.This establishes an idea for the resolution of this type of question with the finger space coordinate transformation method,then obtains the fatigue characteristic values of different position in the global coordinate system,and finally achieves a physiological parameter definition of human upper limb posture.The human-machine weight of objects is determined by a combination of expert decisions and an analytic hierarchy process.On this basis,in combination with Ant Colony Optimization(ACO),the layout method for narrow working cabins is created.Finally,a simulation test using Jack software is conducted to verify that the layout method achieves more humanized design requirements.
ergonomics;body fatigue characteristics;narrow working cabins;layout optimization;Ant Colony Optimization(ACO)
U663.8
A
10.3969/j.issn.1673-3185.2016.05.004
2016-03-09网络出版时间:2016-9-21 13:48
范文(通信作者),女,1983年生,博士,讲师。研究方向:人机工程学。
E-mail:fanwen515@163.com
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
青少年科技博览(中学版)(2022年6期)2022-08-31
南都周刊(2021年3期)2021-04-22
中华养生保健(2021年18期)2021-02-13
新传奇(2019年40期)2019-11-01
人类工效学(2019年6期)2019-03-21
中国体育科技(2018年6期)2018-12-13
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
北京体育大学学报(2008年10期)2008-11-17
