浅海中水下航行器尾流感应电磁场建模与仿真
2016-11-02 00:37:52张伽伟姜润翔
系统工程与电子技术 2016年5期
张伽伟,熊 露,姜润翔
(1.海军工程大学兵器工程系,湖北 武汉 430033;2.军械士官学校雷达系,湖北 武汉 430075)
浅海中水下航行器尾流感应电磁场建模与仿真
张伽伟1,熊露2,姜润翔1
(1.海军工程大学兵器工程系,湖北武汉 430033;2.军械士官学校雷达系,湖北武汉 430075)
为了研究水下航行器探测的新途径,以水下航行器产生的尾流为研究对象,推导建立了水下航行器尾流感应电磁场的浅海数学模型,并利用高斯积分法对数学模型进行了数值求解和实例仿真计算,结果表明,水下航行器尾流感应电磁场具有频率低、远场衰减速度慢、传播距离远、持续时间长的特点,量级可观具有可探测性,可用于对水下航行器的探测。
电磁学;水下航行器;尾流;感应电磁场;可探测性
网址:www.sys-ele.com
0 引 言
随着对海洋资源的深入开发,各类水下机器人和水下航行器得到了广泛的应用,而水下目标的探测已成为重要研究课题,尾流感应电磁场作为水下航行器的重要物理场之一,越来越得到重视。早在20世纪60年代,国外学者就对海洋环境的感应电磁场进行了研究,得到了海浪运动感应电磁场,以及洋流、潮汐等运动产生的感应电磁场[14],在海洋环境感应电场理论研究的基础上,1994年美国学者Madurasinghe D等人利用麦克斯韦方程和流体力学的基本理论,对水面船舶尾流和水下航行器尾流产生的感应磁场进行了研究,推导出了在无限水深下尾流感应磁场的数学模型,提出了对尾流感应磁场信号进行处理的方法,得到了船舶尾流感应磁场在空中可探测的结论[57];Madurasinghe D在1998年又对有限海水深度下水面船舶运动产生感应磁场进行了研究,得到了水面船舶尾流感应磁场的三层模型表达式[8];2000年Zou N等人利用麦克斯韦方程求解了船舶尾流电磁场传播特性,提出了可以采用航空磁探的方法探测到船舶的尾流感应磁场[9];2011年Yaakobi等人对水面船舶尾流在有限海水深度下感应磁场进行了深入研究,重点推导得到了感应磁场在空气中的分布模型,说明了通过飞机航空探测船舶尾流感应磁场的可行性[10]。然而上述研究主要集中在空气中水面船舶尾流上感应磁场的特性和可探测性分析,对无限海水深度下尾流在空气和海水中产生的感应电磁场没有做全面分析,也没有推导出在有限海水深度下尾流感应电磁场的3层模型(所谓深海是指建模时将海水视为无限水深考虑空气——海水2层介质下的电磁场模型,浅海则是考虑空气——海水——海底3层介质下的电磁场模型),并且因为水下航行器工况不同其尾流感应电磁场与水面船舶的尾流感应电磁场存在差异,因此需要进一步研究。目前国内对船舶尾流感应电磁场的研究相对较少,文献[11]初步研究了水面船舶在浅海中的尾流感应电磁场,得出了浅海中船舶尾流感应电磁场的各项特性。本文针对国内外研究中尚未建立空气——海水——海底3层介质下水下航行器尾流感应电磁场模型的不足,根据麦克斯韦方程组,利用电磁场的边界条件和相关特性,推导求解水下航行器尾流感应电磁场的3层模型,并对水下尾流感应电磁场的传播特性、频率特性、空间分布,以及可探测性进行分析,完善尾流感应电磁场的研究,为对水下航行器的探测提供新思路。
1 浅海中水下航行器尾流速度场
考虑水下航行器的形状为Rankine卵形体,在海水中运动,空气和海底对航行器的影响不可忽略,令海水深度为d,海水为均匀介质,电导率为σ1,海底的电导率为σ2,空气中的电导率σ0=0。如图1所示,建立直角坐标系,以海水与空气的交界面为x轴,z轴垂直海面指向空气,海水与空气交界面为z=0平面,海水与海底交界面z=-d,y轴与x轴、z轴满足右手定则,坐标系相对于航行器静止不动,航行器位于海水下z=-h处,以恒定的速度υ向x轴的负方向运动;0<z为空气,-d<z<0为海水,z<-d为海底。

图1 水下航行器在浅海中运动的直角坐标系
根据表面波理论[1213],在深度有限的均匀海水中,航行器位于固定深度h,以恒定速度υ沿着一个方向潜航时,将形成的海水表面等效为无数自由平面波的线性叠加,而每个平面波沿与x轴成夹角θ的方向传播[6],则海水表面波速度势函数为

式中,Re为取实部运算;g为重力加速度(9.8 m/s2);k0是超越式(3)的解,由q=Δφ得到航行器的速度场为

式中,i、j、k为沿着3个坐标轴的单位向量。
考虑在t=0 s时刻,长L=20 m,水下排水量500吨(V≈500 m3)的水下航行器位于水下10 m处,以20节(10 m/s)速度航行,令海水深度d=50 m,得到的航行器尾流速度场分布如图2所示,可知水下航行器的尾流速度场主要集中在“V”字形区域内,由横波和散波组成,在靠近“V”字形边界上散波具有局部最大值;尾流速度场在“V”字形区域外都迅速衰减。

图2 航行器尾流速度场在海平面的分布情况
本研究中重点针对水下航行器尾流感应电磁场的建模和特性分析,因此本文中忽略了海浪等环境因素的影响。而在研究尾流感应电磁场信号检测时,需要海流、涌、浪等作为背景噪声加入推导时只将它们的速度势函数代入,其感应电磁场模型的推导过程仍与本文相同,例如在式(1)中加入海浪的速度势函数φp(x,y,z,t)就将海浪影响考虑到了模型中,海浪的速度势函数φp(x,y,z,t)[3]表示为

由于篇幅原因下文中将忽略海浪等环境影响。
2 水下航行器尾流感应电磁场模型
令地磁场为

式中,I为磁倾角;γ为磁倾角。B=μH和E 分别表示航行器尾流感应磁场和感应电场,海水的感应电场可以表示为q×(μH+BE),因为地磁场BE远大于尾流感应磁场μH,所以海水中的感应电场近似为q×BE,于是整理得到航行器尾流感应电磁场满足的麦克斯韦方程组为
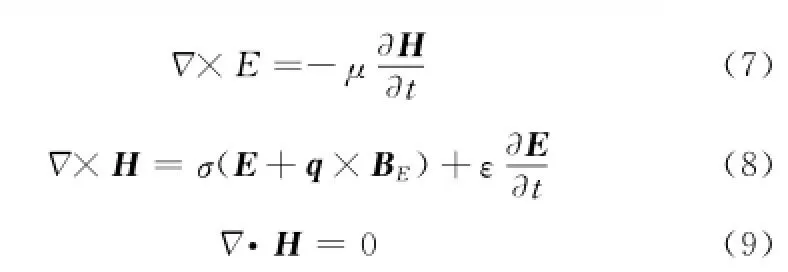
式中,μ为介质磁导率;σ为介质的电导率;ε为介质的介电常数。假定海水是不可压缩的,因此有

由麦克斯韦方程组式(7)和式(8)可知E和H的表达式与尾流速度场q的表达式(5)具有相同的形式,于是航行器尾流感应电磁场可表示为
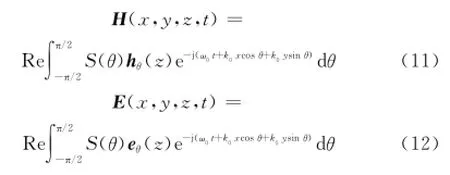
根据式(5)、式(11)和式(12),令

代替式(7)~式(9)中的q、E、H。
将式(14)代入式(9),得到

式中,r=cosθi+sinθj。
为求关于hθ的另一方程,对式(8)求旋度,并将式(7)代入,得

由Δ×Δ×H=Δ(Δ·H)-Δ2H和Δ·H=0,并将式(14)代入式(17),得

其中

利用式(16)、式(18)和式(19),并利用磁场边界条件,可得

将式(25)和式(15)代入式(8),求得eθ(z)为



式中将得到的hθ(z)(式(25)),eθ(z)(式(26))代入尾流感应电磁场的计算式(11)和式(12),就得到了航行器尾流在有限水深条件下的感应磁场H(x,y,z,t)和感应电场E(x,y,z,t)。
3 电磁场模型的求解及分析
由式(25)和式(26)可知,浅海中航行器尾流感应电磁场的3层模型十分复杂,很难通过函数积分得到解析解,可以通过数值分析的方法近似求解。高斯数值积分不仅可以用于含有三角函数的振荡积分数值计算,而且还较普通的插值求积公式(牛顿柯特斯公式)有两倍以上的代数精度,因此可以采用高斯积分数值求解尾流感应电磁场模型,而获得较高的近似精度,在求解过程中将水下航行器尾流感应电磁场的积分区间[-π/2,π/2]等分成500小段,每段利用10阶的勒让德多项式的10个零点作为高斯结点,并求得相应的高斯系数进行积分求解。
按照航行器尾流速度场的计算参数,取海水电导率σ1=4 S/m,海底电导率σ2=0.04 S/m,空气的介电常数ε0=8.85×10-12F/m,海水的介电常数ε=81ε0,海底的介电常数ε=18ε0,海水深度为50 m,地磁场总强度F=5× 104n T,地磁场的磁倾角取I=π/3,航行器沿着垂直于地磁场的方向(东西航向γ=π/2),在水下10 m潜航,进行仿真计算。
图3和图4为在空气中30 m处航行器尾流感应磁场x轴分量的传播和空间分布情况(正横为零),图5和图6为在水下30 m处尾流感应电场的传播和空间分布情况。

图3 空气中尾流感应磁场传播特性
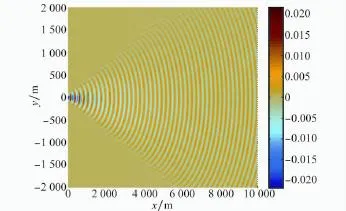
图4 空气中尾流感应磁场的空间分布情况

图5 水下尾流感应电场的分布情况

图6 水下尾流感应电场的空间分布情况
通过图3和图5感应磁场和电场的传播特性可知,随着传播距离成指数衰减,近场衰减迅速,远场趋于稳定,该指数衰减特性也可从感应电磁场的计算式(14)和式(15)的复指数项 e-j(ω0t+k0xcosθ+k0ysinθ)分析得出;图 4和图6说明尾流感应电磁场的空间分布主要集中在航行器后面的“V”字形区域内,在区域外迅速衰减,该现象可从理论上得到解释,在理论推导过程中可知尾流感应电场主要受qθ×BE的影响,qθ即尾流的速度场函数,因此尾流感应电磁场强弱的空间分布规律应与尾流速度场的分布规律相同,即如图2所示,主要集中在航行器后的“V”字形区域内;由图3~图6还可得到,浅海中水下航行器在水下10 m潜航时,空中离水面30 m处尾流感应磁场的量级为10-2nT,水下30 m处感应电场的量级为10-7V/m。
4 尾流感应电磁场的频率特性
浅海中水下航行器尾流感应电磁场的频率方面,由浅海中感应电磁场的模型式(11)、式(12)、式(25)和式(26)可知,浅海中感应电磁场频率是由e-j(ω0t+k0xcosθ+k0ysinθ)项决定。若观测点的位置固定,航行器从初始位置(0,0)以速度υ前进,则x=υt,由式(8)和式(9)得e项中的频率成分变为,因此可知当观测点固定时,得到航行器尾流感应电磁场的频率与航行器的运动速度成反比,运动速度越快频率越低;若航行器从初始位置(0,0)以速度υ前进,观测点从(x0,y0)以速度υa沿着与x轴成α角的直线运动,则在t时刻观测点与航行器间相对位置变为x=x0+(υacosα+υ)t,y=y0+υasinαt,于是项变为,因此可知当观测点运动时,测得的频率与观测点的运动速度和航行器的运动速度均有关系,观测点速度越大测得的频率也越大,航行器的运动速度越快频率越低。
观测点不动时仿真分析航行器分别以5 m/s和10 m/s航行时,水下10 m处产生感应电场的频率特性,得到如图7和图8所示的归一化频谱图。
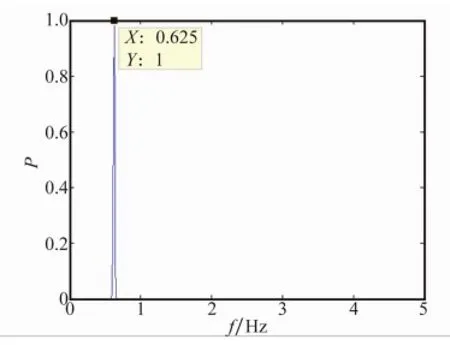
图7 航速5 m/s时,感应电场频谱

图8 航速10 m/s时,感应电场频谱
由图7可知,水下航行器航速为5 m/s时,感应电场主频为0.625 Hz;图8表明航速为10 m/s时,感应电场主频为0.156 Hz,小于航速为5 m/s时的频率,与理论分析一致,说明了航行器运动速度越快频率越低理论分析的正确性。
5 结 论
通过对浅海中水下航行器尾流感应电磁场3层模型的推导和仿真分析,得到了关于地磁场中水下航行器尾流引起的感应电磁场的以下几点结论:
(1)水下航行器尾流感应电磁场的频率特性主要受航行器航速影响,航行器航速越高,感应电磁场频率越低,尾流感应电磁场的频率一般在10-1Hz量级;
(2)在长20 m,排水量500吨的水下航行器附近,尾流感应磁场的量级可达10-2n T,感应电场的量级可达10-7V/m,均高于目前电磁场传感器的测量门限;
(3)尾流感应电磁场随着距离增加成指数迅速衰减,而后趋于平稳,在距离航行器10公里处仍有可观的量级。
本文的研究表明了水下航行器尾流感应电磁场的频率特性、传播特性以及可探测性。
[1]Crews A,Futterman J.Geomagnetic micropulsations due to the motion of ocean waves[J].Journal of Geophysical Research,1962,67(5):299-306.
[2]Sanford T B.Motionally induced electric and magnetic fields in sea[J].Journal of Geophysical Research,1971,76(12):3476-3492.
[3]Weaver J T.Magnetic variations associated with ocean waves and swell[J].Journal of Geophysical Research,1965,70(8):1921-1929.
[4]Larsen J C.An introduction to electromagnetic induction in the ocean[J].Physics of the Earth and Planetary Interiors,1973,7(10):389-398.
[5]Madurasinghe D,Tuck E O.The induced electromagnetic fields associated with submerged moving bodies in an unstratified conducting fluid[J].IEEE Journal of Oceanic Engineering,1994,19(6):193-199.
[6]Madurasinghe D.Induced electromagnetic fields associated with large ship wakes[J].Waυe Motion,1994,20(2):283-292.
[7]Madurasinghe D,Haak G R.The induced electromagnetic fields associated with wakes signal processing aspects[C]//Proc.of the Geoscience and Remote Sensing Symposium,1994:2335-2357.
[8]Madurasinghe D,Hong T.Magnetic variations associated with ocean waves in seas of finite depth[C]//Proc.of the Electro-Magnetic-Acoustics,1998:343-346.
[9]Zou N,Nehorai A.Detection of ship wakes using an airborne magnetic transducer[J].IEEE Trans.on Geoscience and Remote Sensing,2000,38(10):532-538.
[10]Yaakobi O,Zilman G,Miloh T.Detection of the electromagnetic field induced by the wake of a ship moving in a moderate sea state of finite depth[J].Journal of Engineering Mathematics,2011,70(3):17-27.
[11]Zhang J W,Jiang R X,Gong S G.Study of electric field induced by the wake of a moving ship[J].Journal of Harbin Engineering Uniυersity,2014,35(8):931-935.(张伽伟,姜润翔,龚沈光.浅海中船舶尾流产生的感应电磁场[J].哈尔滨工程大学学报,2014,35(8):931-935.)
[12]Miloh T,Tulin M P,Zilman G.Dead-water effects of a ship moving in stratified seas[J].Journal of Offshore Mechanics and Arctic Engineering,1993,115(11):105-110.
[13]Fang M C,Yang R Y,Shugan I V.Kelvin ship wake in the wind waves field and on the finite sea depth[J].Journal of Mechanics,2011,27(1):71-77.
Modeling and simulation of electromagnetic field induced by wake of a submerged vehicle moving in shallow sea
ZHANG Jia-wei1,XIONG Lu2,JIANG Run-xiang1
(1.Department of Weaponry Engineering,Naυal Uniυersity of Engineering,Wuhan 430033,China;
2.Department of Radar,Ordnance Sergeant Academy of PLA,Wuhan 430075,China)
In order to provide the detection of submerged vehicle with new ideas,taking submerged vehicle wakes as the research object,the mathematical model of induced electromagnetic fields in shallow sea is proposed,which is solved using the Gaussian integral method.The instance simulation analysis shows that the induced electromagnetic field signals have low frequency,low decay rate in the far field,long transmission distance,long existing time and considerable scale and detectable,which are significant in the detection of submerged vehicle.
electromagnetism;submerged vehicle;wakes;induced electromagnetic fields;feature of detectable
O 441.1
A
10.3969/j.issn.1001-506X.2016.05.06
1001-506X(2016)05-1004-06
2015-03-11;
2015-09-04;网络优先出版日期:2015-10-20。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20151020.1329.002.html
国家自然科学基金(51509252);国家重大安全基础研究项目(613166)资助课题
张伽伟(1986-),男,讲师,博士,主要研究方向为舰船物理场。
E-mail:290519038@qq.com
熊露(1986-),女,讲师,博士,主要研究方向为雷达信号处理。
E-mail:369989419@qq.com
姜润翔(1982-),男,讲师,博士,主要研究方向为舰船物理场。
E-mail:jiang_runxiang@163.com
猜你喜欢
空间科学学报(2021年6期)2021-03-09 06:20:00
小天使·三年级语数英综合(2020年4期)2020-12-23 04:48:40
Journal of Integrative Agriculture(2019年2期)2019-02-14 03:12:26
石油地球物理勘探(2017年4期)2017-12-18 07:15:09
雷达学报(2017年6期)2017-03-26 07:53:06
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:07:07
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29 12:53:20
广东海洋大学学报(2015年3期)2015-12-22 10:05:28
舰船科学技术(2015年8期)2015-02-27 15:38:42
物理与工程(2013年1期)2013-03-11 16:03:46