
新能源汽车电动助力转向系统的仿真与测试
2016-11-01 03:25杨学平蒋超宇薛秀丽钟彦雄陈晓萍
新技术新工艺 2016年9期
杨学平,周 明,蒋超宇,薛秀丽,钟彦雄,陈晓萍
(云南机电职业技术学院,云南 昆明 650203)
新能源汽车电动助力转向系统的仿真与测试
杨学平,周明,蒋超宇,薛秀丽,钟彦雄,陈晓萍
(云南机电职业技术学院,云南 昆明 650203)
电动式助力转向系统(EPS)是一种直接依靠电动机提供辅助转矩的动力转向系统,代表着未来新型汽车动力转向技术的发展方向。基于LabCar环境搭建了EPS仿真测试平台,基于MATLAB/Simulink平台创建了EPS仿真模型,进行了相关模块仿真测试。结果表明,使用LabCar测试系统能降低EPS系统的开发成本,对开发新能源汽车系统具有实用价值。
电动助力转向系统;MATLAB/Simulink;虚拟仿真;LabCar
随着能源问题的日益突出,汽车电动助力转向系统(EPS)得到了越来越广泛的关注。EPS以其节能、环保和主动安全性能高等特点逐渐取代了传统液力助力转向系统,是未来新能源汽车重要零部件组成之一[1]。
国内对EPS系统的研究比国外相对落后,随着新能源汽车的推广,该系统已经迅速成为各零部件及研发公司的研究焦点。EPS系统的研发已经被定为国家新型科技产业项目。而对于汽车零部件厂商而言,为保证提供不同汽车厂商众多型号的EPS,应在出厂之前进行严格测试[2];因此,一套高效的EPS虚拟测试系统的开发成为重中之重。笔者在掌握德国ETAS公司所开发的硬件在环仿真测试平台——LabCar的基础上[3],提出了一套高效的EPS虚拟测试系统。
LabCar是德国ETAS公司开发的硬件在环仿真测试系统,是一部虚拟汽车,其DEVM模型包含汽车各个子系统。在LabCar-EE环境下对Simulink软件中的电动助力转向系统模型进行仿真测试,并对结果进行分析,以保证后续测试顺利进行,因此,研究该测试系统具有重要参考价值和理论价值。
1 仿真系统硬件设计
1.1EPS工作原理
EPS的转向动力来源于电动机,根据电动机的分布位置,EPS分为3类:1)转向轴助力式(C-EPS),电动机驱动转向轴而产生助力;2)小齿轮助力式(P-EPS),电动机通过驱动齿轮提供助力;3)齿条助力式(R-EPS),电动机通过驱动齿条提供助力。其工作原理基本一致[4],系统结构如图1所示。

图1 电动助力转向系统结构图
ECU检测到汽车发动机起动点火指令后,会检测转向轴上的转矩传感器,当汽车开始行驶转向,方向盘转动时,传感器会将检测到的转矩变化转化为电信号传递到ECU中;当ECU接收到信号后,根据车速传感器的输入计算出最佳转向特性,得到最终输出数据;又根据发动机转速信号及各种转向状况确定用何种控制模式,同时根据控制模块和输出的信号来决定电动机的动作;减速机构将电动机产生的助力转矩放大,经机械装置向转向车轮提供助力转矩,从而实现转向助力。
1.2EPS测试系统平台的搭建
仿真测试系统总体设计如图2所示。上位机用于进行数据处理,下位机用于运行LabCar中DEVM模型中的助力转向系统。PC机通过串口连接进行数据传输,检测方向盘转矩、传感器信息等,达到测试目的。
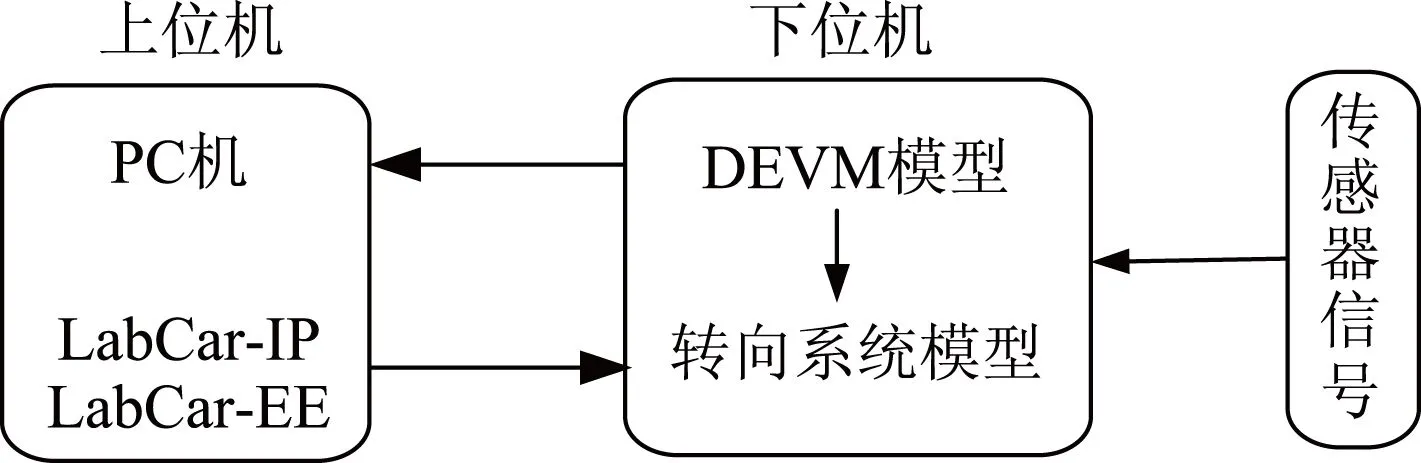
图2 测试系统总体设计
1.3电动助力转向控制策略
EPS控制系统的关键点为:1)控制电动机电流特性,即电动机的电流闭环控制;2)确定电动机助力特性,即目标电流。EPS控制策略如图3所示。
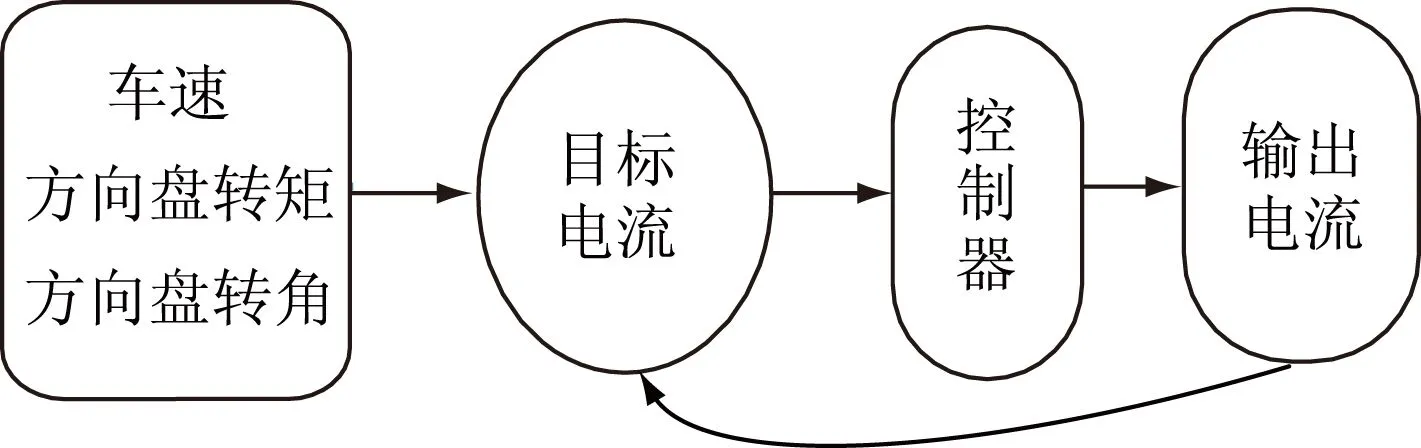
图3 模糊控制策略
EPS系统时常要应对错综复杂的使用环境,路况变化导致的方向盘抖动、各种干扰、信号波动及热辐射等都会对助力转向造成一定的干扰,故需要更精准的控制程序,同时不断地对控制系统进行监控。基础的助力控制是电动助力转向系统的核心控制环节,其工作过程为车辆ECU接受到各种信号(车速信号、方向盘信号和转矩信号),经过车速与电动机目标电流的对应关系而得出目标电流,之后经各种控制算法,输出相应的转矩。
1.4电流与转矩传感器
电流传感器用来检测流过电动机的电流大小,是控制系统中的重要反馈信号,该信号由LabCar中的ES1392板卡来模拟产生。转矩传感器有接触式和非接触式等2种类型,该信号由LabCar中的PB4350板卡模拟产生。
2 EPS测试平台软件开发
2.1EPS系统MATLAB/Simulink模型
根据基本助力控制和回正阻尼控制模式下的目标电流,搭建出目标控制模块(见图4)。

图4 模糊测试模块
在目标电流确定后,利用PID对目标电流进行整合,改善目标电流在各种状态下的响应性及稳定性。封装后的PID控制模块与整合后的目标电流模块加载组合连接,在MATLAB/Simulink环境下,连接EPS系统得出系统仿真模型(见图5)。
2.2LabCar模型连接
LabCar硬件主要由仿真主控机RTPC、操作PC机和输入输出硬件组成。仿真主控机RTPC用来加载、运行和计算物理汽车模型;操作PC机用来
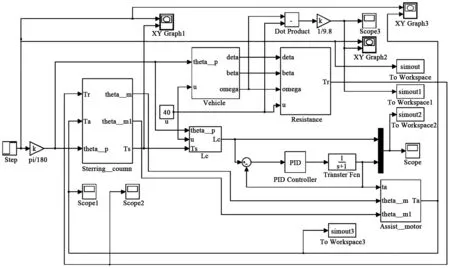
图5 EPS系统仿真模型
安装LabCar软件,及在操作PC机上使用用户界面控制LabCar测试过程。
LabCar的软件部分主要用来修改与创建仿真模型(EPS),对LabCar实时过程进行调控,调整与排序仿真测试过程中出现的每一个信号,以及根据操作人员的需求来设置LabCar硬件的驱动。
LabCar实时仿真系统的优点是系统内部的软件库可以完成将Simulink模型从系统建模、分析到实时仿真的整个过程。具体流程如下:1)利用MATLAB/Simulink将EPS转化成数学模型;2)连接各数学模型模块,创建整个EPS系统仿真模型;3)将仿真模型加载到LabCar-DEVM中(LabCar软件能与Simulink无缝对接);4)对相应工况进行测试仿真。
3 仿真及结果
助力特性是指电动机输出的转矩随着方向盘力矩和行驶车速的变化规律,习惯用助力特性曲线来描述。良好合适的助力特性曲线决定了EPS转向能力的好坏。常见的助力曲线有3种类型:直线型、折线型和曲线型。不同车速行驶时轮胎的作用力点不同,当高速行驶时,转向力矩相对小;反之,转向力矩需求大。由此可知,车速的变化引起了转向力矩的改变。同理,转向系统的助力也随着车速的改变而改变[5]。
转向系统的基本特性是转向灵敏度高,且具有轻便性。选取车速为0时,模拟原地转向工况,有助力和无助力时方向盘输入的转矩变化情况如图6所示。

图6 EPS助力效果
从图6可明显观察到,在同一转向角度下,有助力转向需求更小的转向输入转矩;有助力转向比无助力转向更具有轻便性。
提供助力控制是随着车速和力矩的变化而变化,车速越小,助力力矩越大,原地转向时助力力矩最大,保证了低速转向的轻便;车速越大,助力力矩越小,路感越好,保证了高速转速的操纵稳定性。
任意车速感应下的助力曲线,可以根据EPS不同工作环境下设计开发相应的电动机驱动变化规律。随着汽车速度发生变化,电动机的助力特性发生变化。在实际路况中,随着车速的升高,电动机的助力特性应减小(见图7),这样才能保证安全性。
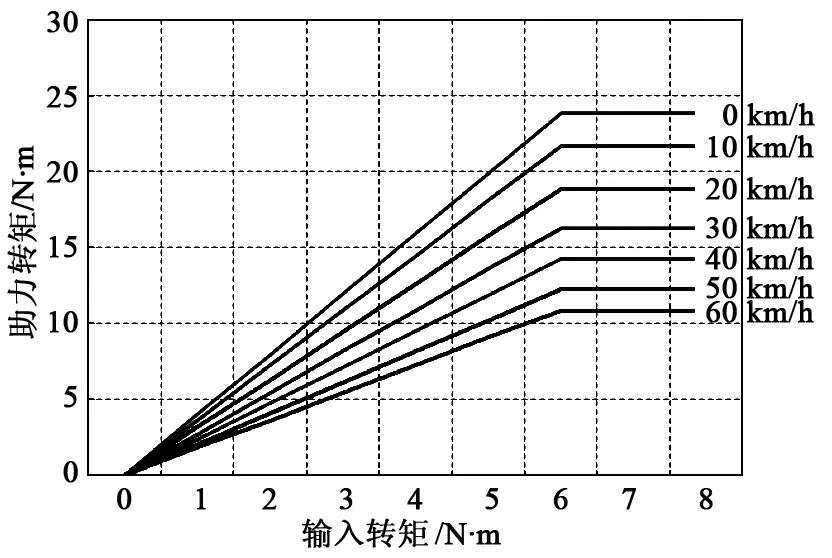
图7 助力特性曲线
4 结语
根据电动助力转向系统的工作原理、结构及相应的数学模型,在MATLAB/Simulink环境下搭建了仿真模型,设计了基于LabCar的测试系统平台,并对转向系统的基本特性进行了仿真。结果表明,所搭建的测试平台具有良好的可行性,应用方便,为进一步开发研究电动助力转向系统提供了重要依据。
[1] 李伟,张德明. 汽车电动助力转向虚拟测试系统研究[J].计算机测量与控制,2007,15(3):316-318.
[2] 李彬.汽车EPS控制器测试系统设计[D].北京:中国矿业大学,2015.
[3] 刘新磊,程增木.基于MATLAB/Simulink的纯电动汽车整车控制系统开发方法研究[J].工业技术创新,2016,1(3):1-6.
[4] 何华.基于dSPACE的汽车电动式动力转向系统控制策略研究[D].广州:华南理工大学,2015.
[5] 肖柏青.电动助力转向系统建模与助力控制策略仿真分析[J].北京汽车,2013(2):25-28.
责任编辑郑练
Simulation and Testing of Electric-power-assisted Steering System of New-energy Vehicle
YANG Xueping, ZHOU Ming, JIANG Chaoyu, XUE Xiuli, ZHONG Yanxiong, CHEN Xiaoping
(Yunnan Vocational College of Mechanical and Electrical Technology, Kunming 650203, China)
Automobile electric power steering (EPS) is the superior technique which supplies power to steering system of automobile with motor directly. And it has become the sign of future development direction of high technique of automobile. A platform of the electric-power-assisted steering system of testing and simulating is established based on LabCar. The simulation model of EPS has been established based on MATLAB/Simulink and the related modules have been tested. The test results show the cost of development of EPS has been reduced by LabCar systems. This method can improve high practical value for developing of new energy automotive systems.
EPS, MATLAB/Simulink, simulation, LabCar
TK 422
A
杨学平(1987-),男,硕士研究生,主要从事发动机电子控制技术等方面的研究。
周明
2016-04-22
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
通信电源技术(2016年1期)2016-04-16
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
