
侧窗探测自适应制导研究
2016-10-29 02:11余英侯明善张斯哲殷春武
西北工业大学学报 2016年2期
余英,侯明善,张斯哲,殷春武
(西北工业大学自动化学院,陕西西安 710072)
侧窗探测自适应制导研究
余英,侯明善,张斯哲,殷春武
(西北工业大学自动化学院,陕西西安 710072)
为增强配置侧窗导引头的导弹的探测和跟踪目标的能力,在比例导引的基础上提出了一种随导弹速度前置角变化的自适应比例导引,随后在自适应比例导引的基础上通过引入目标加速度补偿项得到了一种针对目标机动的自适应增广比例导引,通过研究这两种制导律的脱靶量和导弹速度前置角范围,得到了侧窗探测条件下制导律的适用范围,最后基于导引弹道仿真与传统比例导引和平行接近法进行了仿真比较。仿真结果表明,侧窗探测条件下自适应比例导引和自适应增广比例导引有效且适用范围更广。
自适应控制;平行接近法;制导系统;比例导引;侧窗探测;目标机动
侧窗探测是指将导引头安装在弹体侧面探测目标的方式。在大气层高速作战的防空导弹因气动加热会严重影响其红外导引头的探测范围,为解决这种问题,导引头通常配置在弹体侧面以避开导弹头部的热流密集区。侧窗探测成为近年来的研究热点,周艳萍等[1]采用变结构控制设计了侧窗探测条件下姿态角跟踪控制器和参数自适应选择方法,但并未涉及制导问题。宋明军等[2]以THAAD拦截导弹为模型,研究了侧窗探测中制导段的姿态控制问题,解决了中末制导交班时满足目标处在导引头视场的导弹姿态控制问题。葛连正等[3]基于THAAD拦截弹配置体制重点研究了3D条件下自适应滑模变结构制导律设计问题,采用对视线角的角度约束来实现姿态要求,没有直接考虑导弹的姿态控制问题,气动力也完全视为干扰对待。Zhu等[3]基于动能拦截器研究了侧窗探测下末制导过程的期望姿态角,建立了单目标非线性优化模型和目标函数,通过将侧窗的视线约束转化成姿态角和气流角的约束,解上述优化问题得到了期望的姿态角。张洪波等[4-5]研究了动能拦截器侧窗定向方法,基于相平面开关曲线设计了姿态控制律,降低了姿态稳定回路的复杂性,但未涉及制导与控制的协调等问题。徐龙[6]针对侧窗探测下制导控制一体化问题,提出一种半BTT控制方式SBTT(semi-bank-to-turn)来解决纵向平面的侧窗约束问题,并设计了受视线终端约束的变结构制导律,但该方法对中制导提出了严格要求,且制导计算需要目标加速度估计信息。比例导引方法是制导中应用最广泛的方法,具有弹道较为平直、弹道所需法向过载较小、易于实现全向攻击的优点,因此,配置侧窗导引头的导弹采用比例导引依然是工程应用的首选[7]。
1 问题描述
导引头安装在导弹头部的导弹仅需满足制导精度要求,而配置侧窗导引头的导弹由于其寻的导引头配置在了弹体侧面,故需要同时满足目标探测要求和制导精度要求。
1.1制导系统模型
在目标机动的情况下,典型制导系统关系可用图1所示的结构图描述。

图1 制导系统结构图
1.1.1导弹和目标动力学环节
将包括姿态控制系统在内的动力学模型简化成一个稳定的二阶环节。因为导弹和目标动力学模型结构相似,用i(i=m,t)表示导弹M和目标T,其传递函数可表示为

式中,ai表示导弹和目标法向加速度;aic表示导弹和目标法向加速度指令;Ti、ξi分别表示稳定回路时间常数和阻尼比。
1.1.2导弹和目标运动学环节
假设导弹和目标始终在同一固定平面内运动,其质心运动方程如(2)式所示。

式中,用i(i=m,t)表示导弹M和目标T,xi和yi表示导弹和目标在平面中的位置、vi为导弹和目标速度矢量、θi为导弹和目标速度矢量vi与Ogxg轴的夹角、air和ain分别为导弹和目标的加速度在导弹和目标速度方向和垂直导弹和目标速度方向上的分量。
1.1.3弹-目相对运动模型
导弹和目标在二维平面的几何运动关系如图2所示。
图2 弹目标相对运动关系模型
相对运动方程如(3)式所示。

式中,r为导弹与目标的相对距离;q为弹目视线角;θm、θt分别为导弹和目标速度倾角;ηm、ηt分别为导弹和目标速度前置角;vm、vt分别为导弹和目标的速度。
1.1.4导引头动态环节
导引头并不是理想的,属于典型的角跟踪系统,其输入输出关系用带延迟环节的一阶惯性环节来描述,其传递函数可以表示为

式中,τ表示纯延迟环节的延迟时间,Ts表示导引头动态时间常数,qm是导引头测量的视线角速率,q是弹目视线角速率。
1.1.5制导律
采用加速度关系描述的比例导引,导弹的法向加速度指令amc可表示为
式中:N为比例导引的有效导航比是影响比例导引性能的关键因素之一,r为导弹和目标沿视线方向的接近速率。
1.1.6指令限幅环节
导弹法向加速度受弹体可承受最大可用过载和发动机能给出的最大推力约束,为保证加速度指令不超过弹体可承受的最大过载和发动机能给出的最大加速度,应对弹体指令限幅,设导弹法向允许的最大加速度为am⁃max,则限幅后的导弹加速度指令为

1.2侧窗探测条件下制导几何关系及指标要求
研究中可暂不考虑制导控制耦合的动力学特性,仅考虑导弹侧窗的几何约束特性,平面侧窗探测条件下的制导几何关系如图3所示。
图3 平面侧窗探测条件下制导几何关系
单一侧窗条件下侧窗纵轴(主光轴)与弹体纵轴的夹角值处于20°~70°时,导引头可以探测到目标信息。由此可见,视线只有位于图中2条虚线中间,导弹才能通过侧窗的导引头探测到目标。由于不考虑制导与控制的耦合,则认为导弹速度方向即为导弹的弹体方向,这样侧窗探测制导角度约束条件为:导弹速度前置角要满足20°<|ηm|<70°。
导弹在拦截目标的过程中,不仅要求位于侧窗的导引头能一直探测到目标,而且需要导弹精确打击上目标。本文最大允许脱靶量设定为3 m,因而,侧窗探测条件下指标要求如下。
1)脱靶量小于3 m;
2)导弹速度前置角20°<|ηm|<70°。
1.3表征制导律适用范围的物理量
为消除视线角的影响,导弹初始速度倾角和目标初始速度倾角均用弹-目视线作基准线来描述。为使初始时刻导弹即可探测到目标,导弹速度倾角θm0=q0+Δm,固定取Δm=25°,规定视线方向逆时针转到导弹速度方向为正;目标速度倾角θt0=q0+Δt,目标全方位运动时Δt∈[-180°,180°],规定视线方向逆时针转到目标速度方向为正。由于导弹初始发射偏角Δm值固定,故侧窗探测条件下制导律的适用范围可用满足侧窗探测要求的目标初始发射偏角Δt的范围来表示。
2 制导律设计
2.1自适应比例导引
根据速度前置角ηm的定义有

根据比例导引的导引关系有

将(8)式带入(7)式对时间t微分,得到

(9)式两边同时对时间t积分有

而比例导引如(5)式所示。

下面对ηm0的正负和q-q0的正负分情况讨论,且ηm与N的变化关系如图4所示。

图4 ηm与N的关系示意图
1)当ηm0<0且q-q0>0时,(13)式是关于N的减函数,根据侧窗探测指标的要求,ηm应该满足-70°<ηm<-20°,要使ηm<-20°,N应该适当增大。
2)当ηm0<0,q-q0<0时,(13)式是关于N的增函数,根据侧窗探测指标的要求,ηm应该满足-70°<ηm<-20°,要使ηm<-20°,N应该适当减小。
3)当ηm0>0,q-q0>0时,(13)式是关于N的减函数,根据侧窗探测的要求,ηm应该满足20°<ηm<70°,要使ηm>20°,N应该适当减小。
4)当ηm0>0,q-q0<0时,(13)式是关于N的增函数,根据侧窗探测的要求,ηm应该满足20°<ηm<70°,要使ηm>20°,N应该适当增大。
根据上述分析知,导航比可影响导弹速度前置角ηm的范围,故增加一项随ηm自适应变化的修正因子来改变导航比,并根据上述规律调整N,达到控制ηm范围的目的。由于|ηm⁃min|=20°,为留余量,设定|ηm0|=25°,并在|ηm|>20°提前应用修正的比例导引。综合上述因素,自适应比例导引如(14)式所示。


2.2自适应增广比例导引
为提高比例导引跟踪机动目标的性能,可在比例导引的基础上引入目标加速度项。
对(3)式平面弹-目相对运动方程中的第一个和第二个方程分别微分一次,整理得到

从而可得(15)式的简化形式,简化的二阶非线性微分方程如(17)式所示。

为保证良好的制导性能,设计的制导律必须保证弹道收敛,即由(17)式描述的弹-目间的动力学关系对任意初始条件都是渐近收敛的。考虑到一般弹-目视线角q可测,设垂直于视线方向的导弹加速度满足

这里的f(t)是待定的函数,将(18)式带入(17)式第一式可得到

整理得到




将f(t)带入(19)式可以得到

把(22)式带入(15)式的第一式,得到

假定导弹和目标纵向速度恒定不变,则有amr=0,atr=0,所以(23)式可以化简为


结合(14)式给出的自适应比例导引,可得到自适应增广比例导引如(26)式所示。

3 仿真结果及分析
3.1仿真条件设定
基于2.1小节的制导回路,系统参数设定如表1所示。

表1 系统参数值
θm0=q0-25°,Δt∈[-180°,0°]与θm0=q0+25°,Δt∈[0°,180°]时仿真结果对称,故可以θm0=q0+25°,Δt∈[0°,180°]为例研究侧窗探测条件下制导律的适用范围。
3.2自适应比例导引适用范围
为全面考察制导律性能,除自适应比例导引,还选取了传统比例导引律和平行接近法进行仿真。方便比较,导航比均取N=3,自适应参数为a=30°,b=30°,k1=1。在Δt∈[0°,180°]时,每隔10°仿真一次,其他初始条件同4.1节,结果如图5所示。

图5 目标匀速直线运动仿真结果
根据仿真结果知:(1)侧窗探测条件下自适应比例导引同时满足2项指标要求的只有Δt∈[0°, 150°);(2)比例导引同时满足2项指标要求的只有Δt∈[20°,150°);(3)平行接近法同时满足2项指标要求的只有Δt∈[30°,150°];(4)对加速度而言,3种制导律绝大部分初始条件产生的加速度小于最大加速度。
基本结论:目标匀速直线运动时,自适应比例导引基本适用于侧窗探测条件下的制导且其在侧窗探测条件下的适用范围较比例导引和平行接近法的适用范围均广。
3.3自适应增广比例导引适用范围
3.3.1目标常值机动仿真结果
目标常值机动幅值为6g,随机起始机动模式,机动起始点为tM=arg[r(tM)=0.5r0],即弹⁃目相对距离变为初始相对距离一半时,目标开始机动。
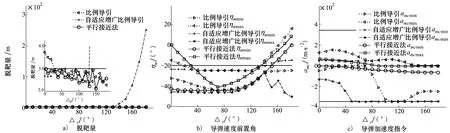
图6 目标常值机动仿真结果
同样地,除自适应增广比例导引,还选取了传统比例导引和平行接近法进行仿真。导航比均取N=3,自适应增广比例导引参数为a=30°,b=30°,k1=1.5,k2=0.4。目标初始发射偏角Δt∈[0°, 180°],每隔10°仿真1次,其他初始条件同4.1节,结果如图6所示。
基本结论:(1)不论从脱靶量还是从导引头侧窗探测范围的角度看,目标机动导致侧窗探测性能变差,使得侧窗探测条件下比例导引的适用范围变窄;(2)目标常值机动时,自适应增广比例导引基本能适用于侧窗探测条件下的制导且其在侧窗探测条件下的适用范围较比例导引和平行接近法的适用范围均广。
3.3.2目标方波机动仿真结果
目标方波机动幅值为6g,角频率为0.5πrad/s,即atc=(6g)·square(0.5πt),目标机动同样采用随机起始机动模式。
同样地导航比均取N=3,自适应增广比例导引的参数不变,仍为a=30°,b=30°,k1=1.5,k2=0. 4。目标初始发射偏角Δt∈[0°,180°]时,每隔10°仿真1次,其他初始条件同4.1节,结果如图7所示。

图7 目标方波机动仿真结果
根据仿真结果可知:(1)对于目标机动atc=(6g)square(0.5πt),侧窗探测条件下自适应增广比例导引同时满足两者要求的只有Δt∈[0°,150°];(2)比例导引同时满足两者要求的只有10组,适用范围受限;(3)平行接近法同时满足两者要求的只有Δt∈[40°,150°];(4)对加速度而言,自适应增广比例导引较其他2种制导律要大,且与目标常值机动的情况相比,自适应增广比例导引的需用加速度值较小。
基本结论:(1)目标方波机动时,自适应增广比例导引基本适用于侧窗探测条件下的制导且其在侧窗探测条件下的适用范围较比例导引和平行接近法的适用范围均广;(2)对比atc=6g与atc=(6g)square(0.5πt)的结果可知,目标常值机动比方波机动对导弹速度前置角范围的影响更大,故侧窗探测条件下自适应增广比例导引在目标方波机动时的适用范围较目标常值机动时适用范围更广;(3)自适应增广比例导引的同一组参数同时适用于相同幅值的常值机动和方波机动这两种不同的机动方式,且适用范围均较广,由此可见,自适应增广比例导引的适应性和参数鲁棒性较好。
4 结 论
满足侧窗探测的要求对增强导弹探测跟踪能力具有实际工程意义。通过给比例导引律引入随导弹速度前置角自适应变化的因子将侧窗的约束考虑在内,本文提出了一种适用于目标匀速直线运动的自适应比例导引和一种适用于目标机动的自适应增广比例导引。结果表明:侧窗探测条件下自适应比例导引和自适应增广比例导引有效且适用范围比传统比例导引和平行接近法的适用范围更广。
[1] 周艳萍,张锐,李君龙.侧窗探测下的姿态变结构控制[J].现代防御技术,2006,34(1):29-32,46
Zhou Yanping,Zhang Rui,Li Junlong.Attitude Variable Structure Control for Side Window Detection[J].Modern Defense Technology,2006,34(1):29-32,46(in Chinese)
[2] 宋明军,魏明英.侧窗探测条件下的制导控制系统设计方法研究[J].现代防御技术,2007(05):71-75
Song Mingjun,Wei Mingying.Control and Guide System Design Method for Side Window Detection[J].Modern Defense Technology,2007(05):71-75(in Chinese)
[3] Zhu B,Quan Q,Cai K.Desired Attitude Angles Design Based on Optimization for Side Window Detection of Kinetic Interceptor[C]//Proceedings of the 27thChinese Control Conference,2008,Kunming,China:592-597
[4] 张洪波,郭振云,汤国建.大气层高空具有侧窗的动能拦截器的数字仿真[J].系统仿真学报,2007,23:5383-5385
Zhang Hongbo,Zhen Yun Guo,Tang Guojian.Digital Simulation of Kinetic Kill Vehicle with Side Window Operating in Higher Atmosphere[J].Journal of System Simulation,2007,23:5383-5385(in Chinese)
[5] 张洪波,郭振云,汤国建.大气层高层功能拦截器侧窗定向方位研究[J].国防科技大学学报,2008(06):34-38
Zhang Hongbo,Guo Zhenyun,Tang Guojian.Study of Side Window Orientation of Kinetic Kill Vehicle Operating in Higher Atmosphere[J].Journal of National University of Defense Technology,2008(06):34-38(in Chinese)
[6] 徐龙.侧窗探测下末制导段制导控制问题研究[D].哈尔滨:哈尔滨工业大学,2012
Xu long.Research on Guidance and Attitude Control of Missile with Side-Window Detection for Terminal Guidance[D].Harbin, Harbin Institute of Technology,2012(in Chinese)
[7] 王亚飞,方洋旺,周晓滨.比例导引律研究现状及其发展[J].火力与指挥控制,2007(10):8-12
Wang Yafei,Fang Yangwang,Zhou Xiaobin.The Status Quo of Proportional Navigation Guidance Law and its Development[J]. Fire Control and Command Control,2007(10):8-12(in Chinese)
A New AdaPtive ProPortional Navigation Based on Side Window Detection
Yu Ying,Hou Mingshan,Zhang Sizhe,Yin Chunwu
(School of Automation,Northwestern Polytechnical University,Xi′an 710072,China)
To enhance the ability of detecting and tracking targets for missiles with side window seekers,a new adaptive proportional navigation with the change of the missile's lead angle is presented based on proportional navigation.Then,a new adaptive augmented proportional navigation is proposed for maneuvering target by introducing the target's acceleration compensation term on the basis of the adaptive proportional navigation.By studying the miss distance and the range of missile's lead angle of these two kinds of guidance law,the application range of the guidance law is obtained under side window detection.Finally,the simulation is compared with that of the traditional proportional navigation and the constant bearing navigation.Simulation results show that the adaptive proportional navigation and the adaptive augmented proportional navigation are effective and both have a wider range of application under side window detection.
adaptive control;constant bearing navigation;guidance system;proportional navigation;side window detection;target maneuver Acceleration,adaptive control systems,angle of attack,angular velocity, attitude control,computer simulation,controllers,dynamics,efficiency,electronic guidance systems, geometry,kinematics,multiobjective optimization,target tracking,transfer functions,velocity
V448.13
A
1000-2758(2016)02-0287-07
2015-10-20基金项目:上海航天科技创新基金(SAST 201403)资助
余英(1992—),女,西北工业大学博士研究生,主要从事导弹的制导与控制研究。
猜你喜欢
技术与市场(2022年12期)2023-01-07
中国电气工程学报(2019年20期)2019-09-10
中国特种设备安全(2019年2期)2019-04-22
西华大学学报(哲学社会科学版)(2016年1期)2016-08-06
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
中国工程咨询(2015年8期)2015-02-16
计算机辅助工程(2014年1期)2014-03-13
