公交巴士自动靠站装置研究
2016-10-28 07:56王卫军刘唐志
公路与汽运 2016年1期
王卫军,刘唐志
(1.重庆交通大学土木建筑学院,重庆 400074;2.重庆交通大学交通运输学院,重庆 400074)
公交巴士自动靠站装置研究
王卫军1,刘唐志2
(1.重庆交通大学土木建筑学院,重庆400074;2.重庆交通大学交通运输学院,重庆400074)
当前公共交通发展中遇到了一些突出问题,降低了公共交通的吸引力,人、车、路、环境之间的矛盾越来越突出。为了改善公共交通的乘车环境、提高公共交通服务质量、增加公共交通的吸引力、缓解城市交通拥堵,文中针对目前公交巴士车辆进站秩序混乱、准点率低、乱停靠等现状,提出了由路线轨迹导航和精确定点停车两大系统组合而成的公交巴士自动靠站装置,通过对公交巴士行驶路径的精确规定改善公交巴士的进站秩序和停靠秩序,通过精确定点停车技术提高乘客的上车效率和车辆的运行效率。
公共交通;公交巴士;靠站装置;磁导航;定点停车;自动驾驶
随着中国城镇化建设步伐的加快,人口分布向大中城市聚集,小汽车保有量急速增长,城市交通拥堵加剧,给市民的正常生活带来极大不便。公交出行理应为居民出行带来诸多便利,但当前的公交巴士系统存在诸多问题(如发车时间间隔长、行驶速度慢、准点率差、进站秩序混乱等),严重降低了其作为公共交通本该对乘客具有的吸引力,致使其在城市居民出行方式中的比重急剧下降,部分大城市的公交巴士出行比重已低于20%,远低于发达国家的水平。因此,急需提高公交巴士行驶的智能化,进而提高公交巴士运行效率和服务质量。
1 自动靠站装置的组成和功能
公交巴士靠站装置是实现车辆到站后自动行驶并精确定点停靠的设备,主要分为路线轨迹导航系统和精确定点停车系统,两大系统各有其特定的功能,相互紧密合作,共同控制着公交巴士车辆的靠站(见图1)。
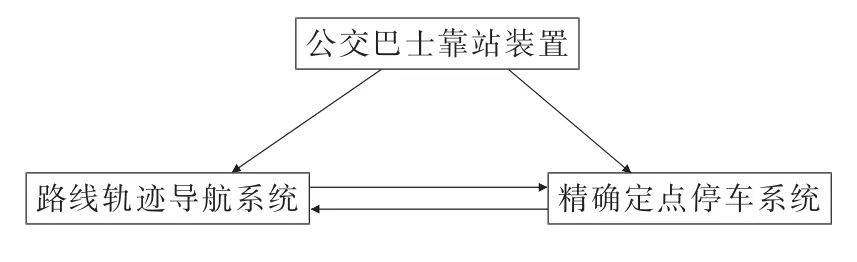
图1 公交巴士靠站装置的组成
1.1轨迹导航系统
路线轨迹导航系统主要负责公交巴士行驶轨迹的控制,使公交巴士在规定的范围内严格沿着固定的轨迹行驶,避免其与其他车辆发生路线冲突,提高公交巴士的进站效率。
路线轨迹导航系统的主要功能是实现车辆的横向控制,通过车载传感器检测地面发射器发出的信号并经过车载CPU处理,判断车辆的行驶状态,再根据一定的控制模型计算出合理的控制量来控制车辆。车载检测系统还对车辆控制系统的信号执行情况进行实时检测,发生调整过大或过小的现象时,还需对信号进行重新检测处理,使车辆能自动行驶在指定的路线轨迹上。图2为该系统控制框架。

图2 轨迹导航系统的控制框架
目前,惯性导航系统、视觉导航系统、磁导航系统、激光导航系统及超声波导航系统等的技术比较成熟,其中,磁导航系统具有测量精度高、重复性好、可靠性和鲁棒性高等优点,同时磁钉一旦埋设好后,维护费用非常低,不易损坏,使用寿命长,受天气影响程度小。故轨迹导航系统采用磁导航。
1.1.1磁钉
磁钉是安装在路上并能发射磁场的物体,是整个轨迹导航系统中的信号发射源。为了研究磁钉磁场的分布特性,选用圆柱形磁钉进行建模分析(见图3)。沿磁钉轴线磁场强度B可用下式计算:

式中:Br为剩磁(k Gs);d为与磁钉上表面的距离(cm);l为磁钉长度(cm);r为磁钉半径(cm)。

图3 磁钉模型(单位:cm)
1.1.2磁尺
磁尺由多个磁阻传感器组成,通过检测磁钉发出的磁场强度来控制公交巴士的行驶方向。如图4所示,磁尺总长为100 cm;中间分布着13个磁阻传感器,每个传感器间隔5 cm;两头分别布设2个磁阻传感器,间隔10 cm。由于公交巴士在实际运行过程中横向位移不会过大,100 cm的磁尺长度基本满足车辆控制的需求。

图4 磁尺的布置(单位:cm)
1.2精确定点停车系统
精确定点停车系统的主要功能是通过站台与公交巴士车辆之间的信息交流,确定车辆的行驶状态,使公交巴士能快速、准确地停靠在公交站台为其提供的指定区域,避免公交巴士到站后不按规则“见缝插针”停靠的现象;使每辆公交巴士都有自己固定的停靠位子,方便乘客在固定地点候车,减少公交站台候车人群因公交巴士乱停乱放所引起的不必要的流动现象,使乘客的上下车更方便、安全、高效、快捷,减少乘客上下车的时间损失。该系统主要由车载设备、车站设备等组成。
(1)车载设备。车载系统包括公交巴士超速防护子系统、公交巴士自动控制子系统、公交巴士自动监控子系统,红外传感器系统等。公交巴士超速防护子系统具有防止公交巴士在停车过程中速度过快、零速度检测和车门控制等功能,保证公交巴士在安全速度下运行,使其在符合停靠速度的条件下稳定顺畅地靠站。公交巴士自动控制子系统能接受并处理红外传感器传递过来的信号,并能代替司机智能化地控制车轮的转速和旋转角度,使公交巴士能以稳定的速度精确地停靠在指定区域;乘客上车完毕后,该子系统又能以一定的加速度使车辆平稳地驶离停靠站。公交巴士自动监控子系统主要监督车辆的运行状态和具体操作指令的执行情况,保证整个系统的稳定性;对车辆的行驶安全性进行监控并快速反应,可直接对制动装置下达紧急制动指令,同时实现车辆与地面总控制中心的信息交流。红外传感器主要负责红外信号的检测,把光信号转换成有用的电信号,并同步传输给巴士自动控制子系统。该装置采用TSL256x红外光强传感器,该传感器在红外检测方面应用非常广泛,可自动输出一个二进制的光强值。
(2)车站设备。主要是红外线发射装置。该装置采用XN830S350红外激光发射器作为信号发射器,其波长λ=830 nm。因为需要精确定点停车,用车轮的转角作为公交巴士停靠控制量,所以红外线发射装置的安装位置需经过严格计算和实际测量,其安装见图5。
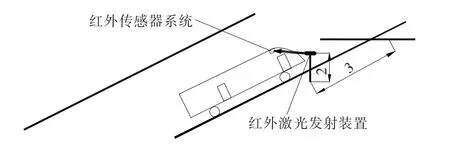
图5 红外发射装置安装示意图(单位:m)
2 自动靠站装置的控制策略
2.1公交巴士行驶轨迹控制
公交巴士行驶轨迹控制取决于磁钉的安装轨迹和磁尺的检测控制。以港湾式公交停靠站为例,想让公交巴士安全、高效地按照指定路线进站并到达指定位置,磁钉的布设需考虑到港湾式停靠站的长度、凹口的宽度、公交巴士的尺寸、公交巴士的转弯特性、磁阻传感器的测量性能等因素。同时由于磁钉发射的磁场具有一定范围,其铺设深度及之间的距离需经过严格测算。根据美国加利福尼亚州圣莱安德罗市第14号大街的磁钉安装规范,其合理间距是50 cm,现实演示结果显示,此时公交巴士的行驶状态良好,符合设计者的精度要求。故这里也暂采用50 cm的磁钉设计间隔,深度为5 cm。布设方式见图6。
磁尺则安装在公交巴士底盘中心位置,与磁钉铺设轨迹垂直。公交巴士在磁钉轨道上方的行驶状态主要分为3种情况(见图7)。在情况一状态下,磁尺上编号为a的磁阻检测器检测出的磁场强度最强,由此可推断公交巴士向右侧偏离了磁钉轨道,汽车方向盘应向左打,使车辆恢复到正常行驶轨道。在情况二时,编号为c的磁阻传感器在磁钉的正上方,其测量值最大,而c正好在车辆的中心,在这种行驶状态下方向盘不需任何操作,只需使车辆按原来状态行驶。在情况三状态下,磁阻传感器e测量出的磁场强度最大,说明该磁阻传感器在磁钉的上方,由此断定车辆向左侧偏离了行驶轨迹,方向盘应向右打,确保公交巴士在既定轨迹上行驶。

图6 磁钉布设轨迹

图7 路线轨迹导航原理示意图
根据磁尺设计规格,对磁尺上的磁阻传感器从小到大标号,左起第一个磁阻传感器标号为1,向右开始递增,最右边磁阻传感器的标号为17,由式(2)可计算出车辆的偏移距离,进而给出具体控制参数。
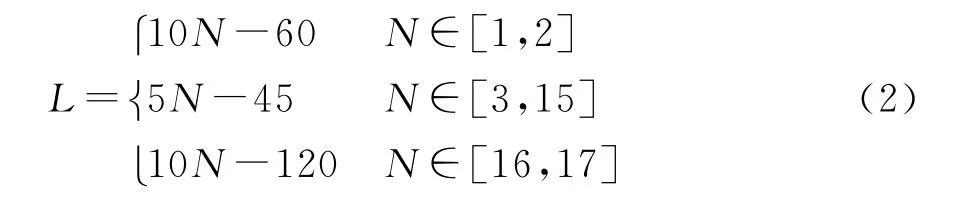
式中:L为公交巴士的偏移距离(cm),L为负时向左偏,L为正时向右偏;N为检测值最大的磁阻传感器标号。
2.2公交巴士精确定点停车控制
红外辅助定距的定点停车装置是一款功能齐备、精确度高、性能稳定性强的停车控制设备,其控制流程见图8。

图8 红外辅助定距定点停车系统的控制流程
利用数学方法,参照车轮模型,通过式(3)可计算出公交巴士车轮在抵消系统反应时间后所转的实际角度。

式中:λ为车轮实际所需旋转的角度(°);M为系统反应时间内公交巴士前进的距离(cm),M=100vt; v为当前公交巴士的行驶速度(m/s);t为控制系统反应时间(s);L为车轮的外直径(cm)。
2.3整个装置的控制
公交巴士靠站装置由路线轨迹导航系统和精确定点停车系统组成,路线轨迹导航主要负责车辆行驶路线的控制,精确定点停车系统控制着车辆的停靠和起动,它们之间相互紧密合作共同控制着公交巴士的自动靠站。整个装置的控制见图9。
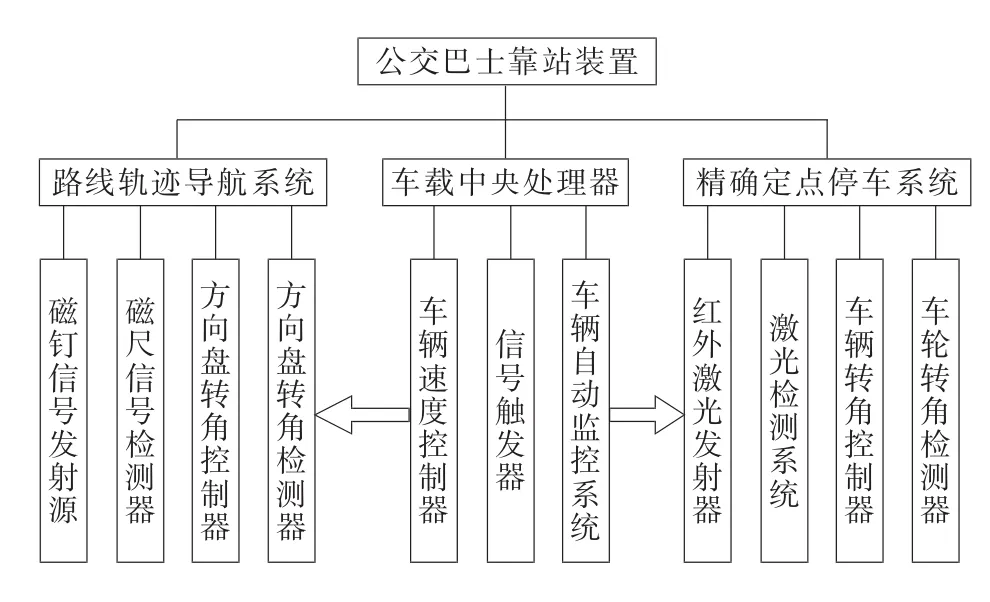
图9 公交巴士靠站装置的控制框架
3 结语
公共交通的发展是解决目前城市交通拥堵的关键。公交巴士的智能化是公共交通发展趋势之一。公交巴士靠站装置的运用,可有效解决当前公交乘车过程中的一些突出问题,使公交巴士的运行和管理更高效、更人性化,提高公共交通的吸引力。
该文从公交巴士停靠装置的整体功能框架出发,对该装置实现靠站功能的技术和理论进行研究,主要成果如下:1)把磁钉导航技术运用到公交巴士轨迹导航中,使公交巴士沿着固定路线轨迹运行,可减少公交巴士对混合交通流的影响,提高道路的整体通行能力。2)将红外激光技术运用到公交巴士的定点停车中,提出了红外线辅助定距定点停车装置的系统框架、设置方法及工作流程。
需要指出的是,公交巴士靠站装置功能的实现是以各系统的信息传输、融合、处理为基础的,这是今后有待进一步研究的一个方向,同时这种靠站装置的运用是否会对现有交通环境产生影响及其大小还有待进一步研究。
[1]Moita F,Nunes U.The magnetic sensing ruler-configuration,software structure and characterization[R].Portugal:University of Coimbra,2004.
[2]贺广宇.基于LQR的列车精确停车控制算法研究[D].北京:北京交通大学,2009.
[3]蒋圣超,张新,胡文宇.列车ATO精确停车问题的研究[J].电子世界,2013(23).
[4]兰羽.基于红外传感器ST188的自动循迹小车设计[J].电子设计工程,2013,21(3).
[5]姜连祥,汪小燕.基于光强传感器STL256x的感测系统设计[J].单片机与嵌入式系统应用,2006(12).
[6]王奥博,刘伟,王卫军,等.基于通视距离检测的高速公路团雾预警装置[P].中国专利:201320459625.5, 2013.
[7]Han-Shue Tan,Fanping Bu,Scott Johnston,et al.Field demonstration and tests of lane-assist/guidance and precision docking technology[R].University of California,Berkeley,2009.
[8]季璇,江航.基于VISSIM的公交停靠站点优化研究[J].公路与汽运,2012(1).
[9]王伟,陈慧,刁增祥,等.基于光电导航无人驾驶电动汽车自动寻迹控制系统研究[J].汽车工程,2008,30 (2).
[10]孙涵,任明武,唐振民,等.基于机器视觉的智能车辆导航综述[J].公路交通科技,2005,22(5).
U491.5
A
1671-2668(2016)01-0046-04
2015-07-19
猜你喜欢
儿童时代·快乐苗苗(2022年11期)2022-12-12
大电机技术(2022年5期)2022-11-17
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
今日农业(2021年21期)2021-11-26
中国慈善家(2021年5期)2021-11-19
新世纪智能(教师)(2021年2期)2021-11-05
防爆电机(2021年4期)2021-07-28
教育周报·教育论坛(2021年21期)2021-04-14
时代人物(2019年29期)2019-11-25
文苑(2019年20期)2019-11-16