
基于后轮主动脉冲转向的车辆稳定性分析与试验
2016-10-27 02:04:17张宝珍AmirKhajepour
农业机械学报 2016年9期
张宝珍 谢 晖 黄 晶 Amir Khajepour,2
(1.湖南大学汽车车身先进设计制造国家重点实验室, 长沙 410082;2.滑铁卢大学机电工程学院, 滑铁卢 N2L 3G1)
基于后轮主动脉冲转向的车辆稳定性分析与试验
张宝珍1谢晖1黄晶1Amir Khajepour1,2
(1.湖南大学汽车车身先进设计制造国家重点实验室, 长沙 410082;2.滑铁卢大学机电工程学院, 滑铁卢 N2L 3G1)
为了提高车辆操纵稳定性,提出一种后轮主动脉冲转向控制策略,并对此做了理论分析和试验研究。基于试验Lexus车辆分析脉冲转向系统对车辆稳定性能的影响并确定最优的主动转向脉冲参数。设计了控制策略结构与算法,基于CarSim和Simulink联合仿真分析,验证所提控制方法的有效性。基于试验Lexus车辆,安装液压脉冲转向系统并进行整车试验研究,验证后轮脉冲转向的实用性。仿真和试验结果表明:质心侧偏角和侧向加速度在峰值处分别减小了46.8%、23.5%,提高了汽车的横向稳定性;侧倾因子能控制在设定的阈值范围[-0.8,0.8],车辆侧倾角减小了25.4%,能有效改善车辆防侧翻能力,且展现出比后轮主动转向更好的控制效果。
车辆; 主动脉冲转向; 操纵稳定性; 参数识别; 整车试验
引言
随着人们对车辆性能的追求和道路条件的改善,现代汽车的车速迅速提高,车辆安全性与操纵稳定性日益受到人们的重视[1]。基于改善车辆动力学性能的主动转向技术,已发展为现代车辆稳定性控制的重要方向[2-3]。主动转向控制通过对前、后轮转角的调整,能有效改善车辆运动状态,提高车辆高速行驶状态下转向响应特性[4-7]。KUO[8]总结传统主动转向控制的不足,提出了主动脉冲转向控制的理念并做了仿真分析。RAHMAN[9]在KUO的基础上,通过建立硬件在环(HIL)试验,验证了主动脉冲转向的实用性。VOS[10]分析了不同转向脉冲频率和幅值对车辆稳定性能的影响。ZHANG等[11]通过仿真和试验研究验证了主动脉冲转向能有效提高车辆的防侧翻性能。这些研究都基于前轮来分析主动脉冲转向控制,并取得了不错的效果,但通过主动脉冲转向作用于后轮,来提高车辆的稳定性并没有充分研究。
基于此,本文以Lexus车辆为研究对象提出一种后轮主动脉冲转向控制策略,进行理论分析,并设计硬件系统做整车试验验证。分析主动脉冲信号参数对车辆动力学性能的影响并确定最优值;运用Simulink和CarSim联合仿真,验证后轮主动脉冲转向系统的有效性;设计液压脉冲发生装置并安装在Lexus试验车上,进行道路试验,验证主动脉冲转向控制系统的实用性。
1 转向系统硬件设计与建模
1.1转向系统设计与建模
利用液压系统来产生试验和仿真所需的转向信号,液压传递装置见图1,执行机构安装在多连杆悬架的横拉杆上,如图2。液压油被输送到执行机构中推动后轮进行转向,其油量的大小和方向,即转向幅值和频率,由驱动电动机控制的液压阀转速和转向决定,驱动电动机的运转由控制系统决定。

图1 液压传递控制模块Fig.1 Hydraulic transmission control module
液压-机械脉冲转向系统可以看成由液压传递部分和液压缸执行部分组成,其原理图如图3所示。

图2 脉冲执行机构的安装Fig.2 Installation of pulse actuator
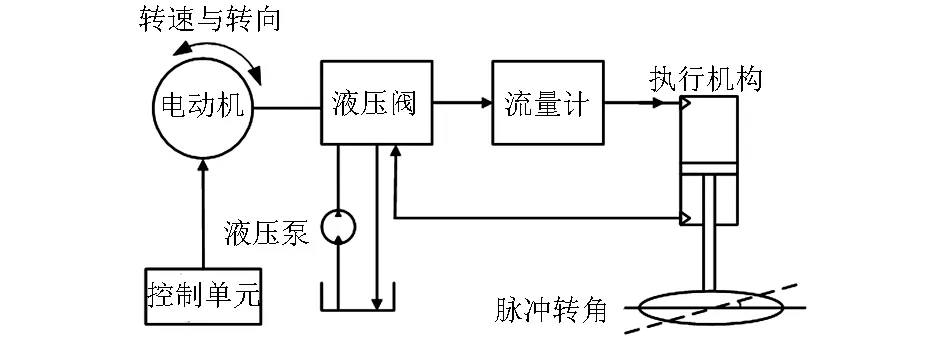
图3 液压传递装置原理图Fig.3 Principle diagram of hydraulic transmission system
通过适当的流体运动基本假设,再结合液压缸运动与液压阀流量方程,此液压系统的压力和流量方程可描述为
(1)
式中Ae——液压缸有效作用面积
kq——液压阀流量系数
xv——液压阀转速
y——执行机构活塞的运动位移
PL——活塞左右两端的压力差
K——液压系统流阻系数
C——液压系统容量系数
考虑作用在活塞杆上的轮胎的转向阻尼系数c与载荷m,液压缸机械执行部分方程为
(2)
1.2模型参数辨识
为进一步研究液压转向系统的特征参数,基于液压转向系统获得的试验数据,进行了模型的参数辨识与验证。此次试验中,液压阀的旋转速度被设定为控制输入变量X,通过位移传感器测定的活塞位移作为输出变量Y。液压系统输入与输出的传递函数,根据式(1)和式(2)表达为
(3)
式中e——液压系统增益s——复频率
d——液压系统延迟时间
参数模型
z(t)=θ*Tφ(t)
(4)
其中

估算模型

(5)
其中
梯度算法
(6)
根据试验所测得的输入输出数据和参数辨识模型,此液压系统增益e=0.17,延迟时间d=0.23 s。
2 车辆模型建立
2.1线性三自由度模型
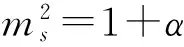
车辆线性三自由度动力学模型,是稳定性分析与控制的基础[12]。以右手原则建立车辆的参考坐标系,车辆的结构参数及受力定义如图4所示,各自由度运动的微分方程如下:
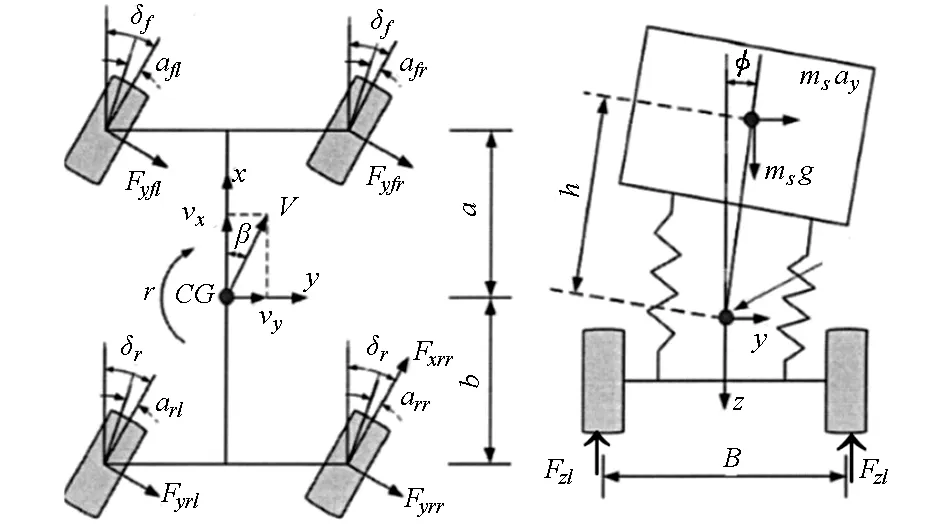
图4 3自由度车辆动力学模型Fig.4 3-DOF vehicle dynamics model
侧向运动
(7)
横摆运动
(8)
侧倾运动

(9)
式中ms——非簧载质量m0——整车质量
Ixx——横摆转动惯量
Izz——侧倾转动惯量
r——横摆角速度φ——车辆侧倾角
Ixz——车辆绕x-z平面的转动惯量
β——车身质心侧偏角
h——悬挂质量中心到侧倾轴线的距离
Fyf——前轴的等效侧偏力
Fyr——后轴的等效侧偏力
a、b——质心到前、后轴距离
Kφ——悬架总的侧倾刚度
Cφ——悬架总的侧倾阻尼系数
轮胎侧向力和轮胎侧偏角基本关系为
(10)
式中kf、kr——前、后轴轮胎的侧偏角刚度
αf、αr——前、后轴轮胎的等效侧偏角
2.2后悬架ADAMS模型
为了分析液压转向执行机构运动对悬架参数的影响,基于试验Lexus车辆参数和多连杆后悬架构件之间的连接方式,所测量的悬架硬点参数如表1所示。建立ADAMS多连杆后悬架模型,如图5所示。图5中硬点号及其名称同表1。

表1 Lexus后悬架硬点测量参数Tab.1 Lexus rear suspension hard point parameters
图5 Lexus多连杆后悬架ADAMS模型Fig.5 Lexus multi-link rear suspension ADAMS model
2.3脉冲信号的实现
运用2.2节中的ADAMS后悬架模型,通过输入不同的活塞位移进行仿真分析,记录位移变化对悬架参数和后轮转角的影响,如表2所示。
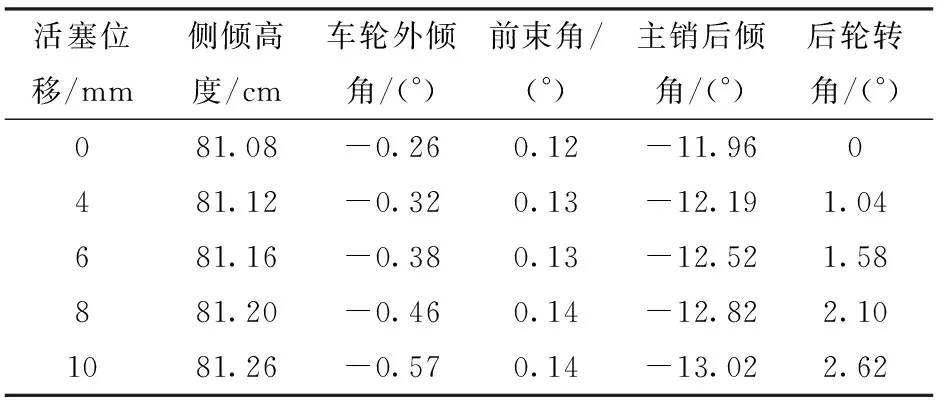
表2 活塞位移的变化对悬架参数和后轮转角的影响Tab.2 Influence of piston displacement on suspension parameters and the rear wheel angle
由表2可知,侧倾中心高度和悬架的其他主要参数变化随活塞位移的变化非常小,在本文研究中,不考虑其影响,即脉冲发生器的运行对车辆悬架系统的正常使用功能没有明显的影响。从表2可知后轮的转角大小与活塞位移近似服从线性关系
δr=C1Δx
(11)
式中C1——常系数Δx——活塞位移
以上分析可知,可以通过控制驱动电动机的转速和方向,来调节活塞运动的速度与方向,进而实现后轮主动脉冲转向,同时此系统的运行不会影响悬架的正常使用功能。
3 控制系统设计
3.1后轮脉冲转向系统理念
后轮主动脉冲转向系统,是通过后轮脉冲转向来达到控制汽车稳定性的目的,控制器根据系统的误差来确定是否激活转向信号,其转向信号是脉冲式的,类似于ABS中的制动力控制,如图6所示。
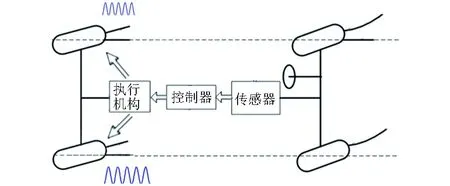
图6 后轮主动脉冲转向原理Fig.6 Concept of rear active pulse
驾驶员将汽车的转向角度和车速输入到被控车辆和理想参考模型中,计算出横摆角速度、质心侧偏角、侧倾角度等参数,然后输入到误差评估器,计算此时的误差,通过误差的大小由控制器决定脉冲发生器的启闭。图7显示了传统主动转向策略与本文所提出的脉冲主动转向策略的区别,下面将分析脉冲转向信号对车辆稳定性能的影响,并通过仿真和试验验证主动脉冲转向系统的优越性。
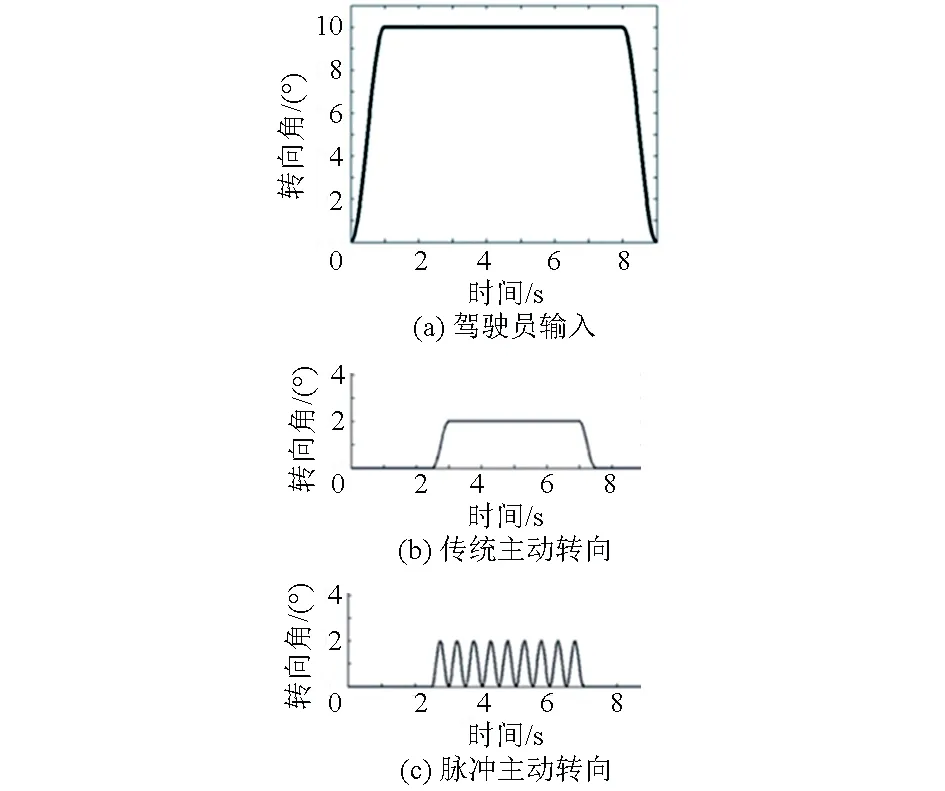
图7 两种后轮主动转向控制的对比Fig.7 Comparison of two active steerings
3.2转向脉冲设计
在选用脉冲信号时,脉冲信号的幅值和频率在仿真和试验运用过程中必须容易调节,因此脉冲信号选用标准正弦脉冲信号,其幅值和频率可以通过控制驱动电动机的转速和转向来实现,其方程表达式为
(12)
式中A——脉冲信号的幅值
w——脉冲信号的频率
δr(t)——后轮转向的脉冲信号
3.2.1转向脉冲频率分析
带有主动转向装置的车辆动力学模型,通过整理方程(7)~(11),可以用线性空间状态方程表达为
(13)
其中
通过对方程(13)进行拉氏变换,可得到横摆角速度和质心侧偏角对转向执行机构活塞位移的传递函数表达式
(14)
其中
k=m0VIz
f=-[m0(a2kf+b2kr)+Iz(kf+kr)]
c=m0V(akf-bkr)+l2kfkr/V
b1=m0VbkrC1b0=-lkrkfC1c1=-IzkrC1
频率响应分析衡量系统输出与输入的一种动态特性关系,本文运用此种方法选择最优的脉冲转向频率。转向频率对车辆横摆角速度和质心侧偏角的影响,如图8中的频率响应曲线所示,最优脉冲转向频率即为曲线中最高点所对应的频率wn。
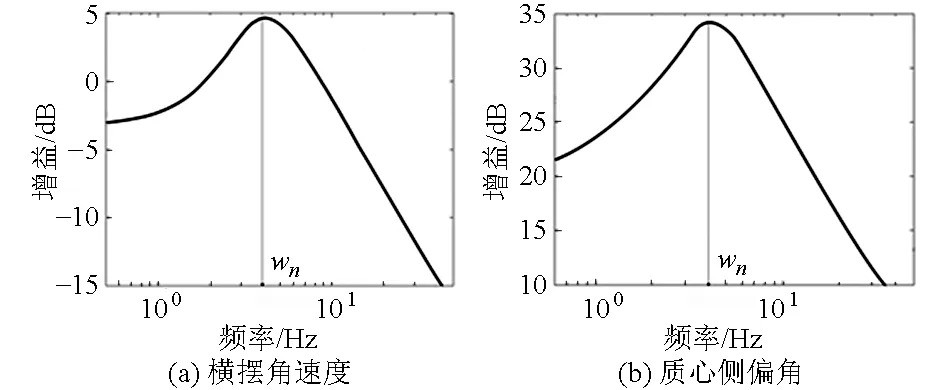
图8 频率响应曲线Fig.8 Frequency response curves

图9 不同脉冲幅值对车辆动力学的影响Fig.9 Influence of different amplitudes on vehicle dynamics
3.2.2转向脉冲幅值分析
运用仿真分析脉冲幅值对横摆运动的影响,正弦脉冲信号的频率固定为4 Hz,阶跃转向工况下,其脉冲幅值分别设定为1.0°、2.0°、3.0°、4.0°,通过此仿真分析不同脉冲幅值对车辆横摆性能的影响, 质心侧偏角和横摆角速度响应如图9所示。
由图9可知,随着脉冲幅值的增大,车辆横摆角速度和质心侧偏角的减少幅度会随之增加,即幅值越大对横摆参数的影响也就越大。但本文中用驱动电动机来产生转向脉冲,当转向脉冲幅值越大,需要更大的驱动力来驱动转向,进而需要更大功率的电动机,所需的转向功率为
(15)
式中Mz——转向后轮绕z方向的力矩
考虑试验安装过程中悬架的空间和尺寸的限制和轮胎侧向力的非线性特性,本文折中选定最优的脉冲幅值为2.0°。
3.3控制目标选择
汽车的横向载荷转移率,是被多数研究人员采用的一种描述车辆发生侧翻时危险程度的指标,具有很好的实用性,在本文中选取此指标作为侧倾因子R,来衡量车辆的侧倾运动。Fzr和Fzl分别代表右侧和左侧的轮胎垂直力,如图3车辆的受力模型中所示,根据垂直方向力的平衡和侧翻力矩的平衡,侧倾因子式为
(16)
车辆的质心侧偏角和横摆角速度是衡量车辆横向运动的2个重要参数。本文通过观测质心侧偏角和横摆角速度与理想参考值的跟随能力,衡量车辆的侧向稳定性和操纵性能,其理想的参考值为[13-14]
(17)
式中τβ、τr为惯性环节时间常数,经验范围一般在0.1~0.25[15], βd通常可取一个非常小的正数,理想情况下可设为0, 稳态横摆增益为
(18)
3.4控制器设计
本文选定侧倾因子R为控制变量,横摆角速度和质心侧偏角为观测变量,来评价主动脉冲转向系统对车辆稳定性能的影响。车辆直线行驶时,R接近为0;当车辆在转弯或变道时,R在-1到1之间变化。如果R接近-1或者1,说明车辆某侧轮胎即将或者已经脱离地面,车辆会发生侧翻。考虑车身的惯性和控制器的延迟作用,设定R的安全阈值为[-0.8,0.8],基本的控制结构如图10所示。
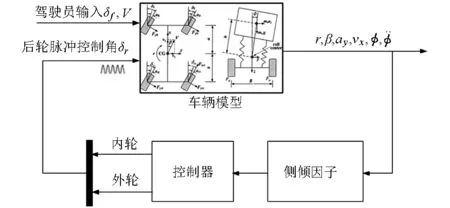
图10 控制器的基本结构Fig.10 Basic structure of controller

图12 双线移工况仿真结果Fig.12 Simulation results of double lane change
如果侧倾因子R在设计的阈值安全范围之内,脉冲发生器不被激活;如果R超过了设定的阈值,那么控制器就会根据R的大小来计算一个脉冲周期的幅值和频率,并激活脉冲发生器使后轮产生一个转向脉冲周期,来控制车辆的运动,如果R仍然超过阈值,那么再产生一系列的转向脉冲周期来控制后轮进行脉冲转向,调整车辆的运动,直到R控制在理想的范围之内。
4 仿真分析
CarSim不仅能建立参数化的车辆仿真模型,而且提供了与Matlab/Simulink的连接接口,可以方便地实现联合控制仿真。本文通过CarSim中的车辆模型,参照Lexus车辆参数做相应修改,并结合Simulink中的控制器进行联合仿真,验证所设计的控制方法的有效性,图11为联合仿真控制系统框图。
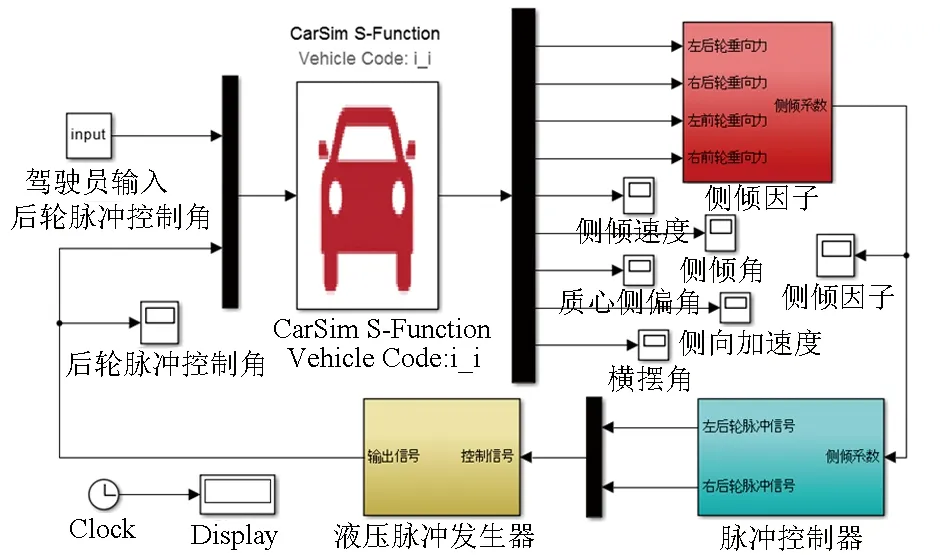
图11 联合仿真控制系统框图Fig.11 Block diagram of joint simulation control system
双移线工况,描述了车辆超车过程或者遇到障碍物时的紧急避让过程,能很好地衡量车辆的性能。本文基于双移线工况对试验Lexus车辆进行车辆稳定性仿真分析,同时为了验证所提系统的优越性,用PID控制的后轮主动转向系统(ARS)进行对比分析,后轮转向角度运用PID控制器来控制,控制器接收到误差信号,从而产生相应的控制角度。设定车辆的行驶速度为100 km/h,后轮转向脉冲幅值和频率分别为2°和4 Hz。其车辆的动力学仿真结果:侧倾因子、车辆侧倾角、质心侧偏角、横摆角速度与侧向加速度,见图12。
仿真结果如图12所示,未控车辆不能很好地跟随理想模型的横摆角速度和质心侧偏角参考值,车辆容易发生跑偏;同时侧向加速度和车辆侧倾角过大,车辆容易发生侧翻,此时车辆处于不稳定状态。而图12a、12b表明在转向脉冲控制作用下,车辆的侧倾因子能控制在指定的安全阈值范围[-0.8,0.8]内,车辆侧倾角减少了25.4%,提高了车辆的侧倾稳定性能;图12c、12d、12e显示车辆的横摆角速度、质心侧偏角和车辆侧向加速度值得到了适当的减小而且变得平缓,质心侧偏角和侧向加速度在峰值处分别减小了46.8%、23.5%,改善了车辆的横摆性能,所以侧倾稳定性和横摆性能都得到了适当的改善。同时从图12的红线所示可知,传统后轮主动转向系统亦能改善车辆的侧倾和横摆稳定性能,但其改善程度没有脉冲转向控制明显。
5 道路试验分析
5.1液压转向装置的安装与测试
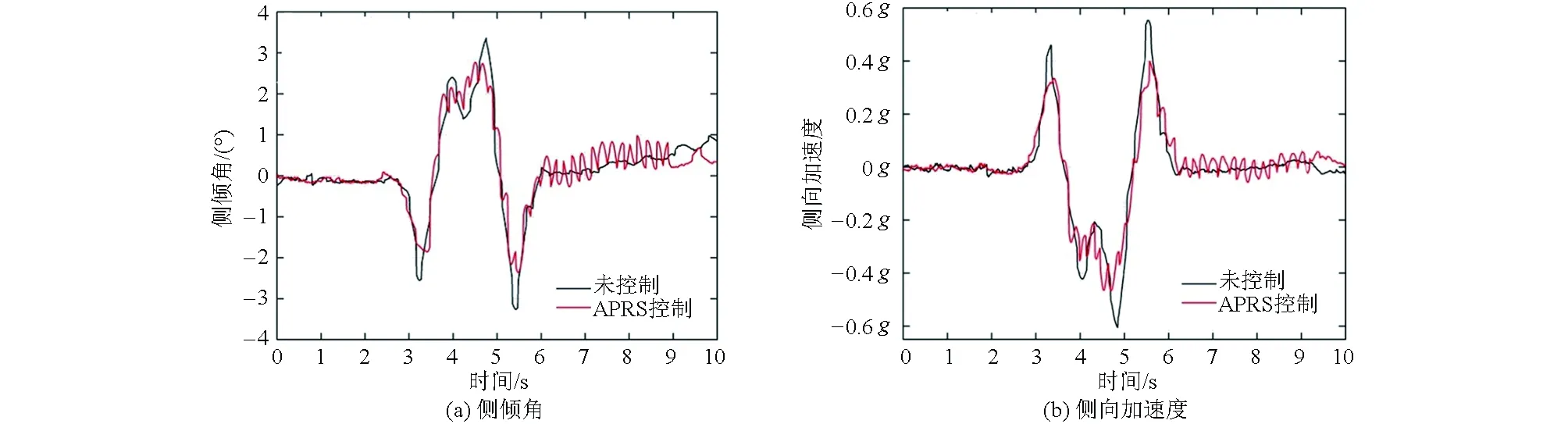
图15 双移线输入工况的试验曲线Fig.15 Experimental curves of double lane input condition
将第1节中设计的液压脉冲转向装置安装在选定的Lexus车辆上。对安装的液压脉冲装置进行测试,测试所安装的转向系统能否及时准确地产生控制器所需的脉冲信号。图13显示了左右后车轮脉冲发生器的安装,并且通过试验对比了控制器输出的理想控制信号与转向装置实际产生的脉冲信号,从中可以得出,此液压系统能够很好地跟随控制器所需的脉冲控制信号。
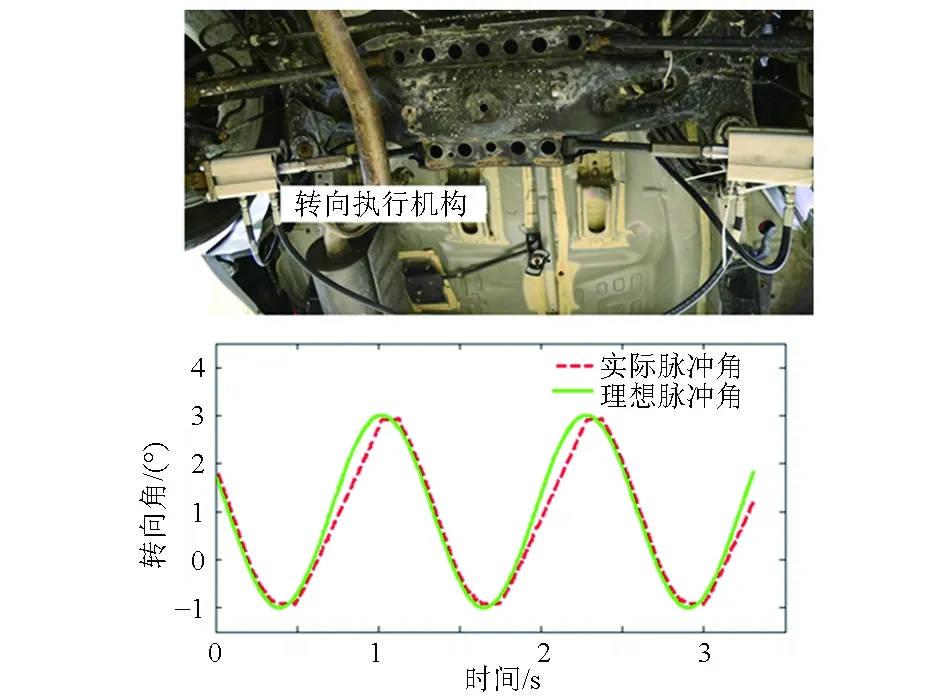
图13 脉冲装置的安装及控制信号的测试Fig.13 Install of pulse device and test of control signal
5.2双移线转向输入道路试验
试验采用了GPS-IMU系统对汽车的状态与路面参数进行测量,同时利用专用传感器与计算机进行数据传递,可得到汽车在不同工况下的参数指标,具体布置如图14所示。

图14 Lexus试验车辆的整体设置与安装Fig.14 Overall setup and installation of Lexus vehicle
双移线试验能很好地验证控制器在短时间内转向反应的灵敏度和汽车避开障碍物和路径跟踪的能力,车速设定为45 km/h。试验结果如图15所示,APRS系统可以有效地减小车辆侧倾角和侧向加速度的值,而且使其值变化的幅度更加平缓,尤其是在峰值处(车辆处于侧倾危险状态),APRS系统的效果更加明显,侧倾角和侧向加速度的峰值分别减小了约23%和26%,由此可见该系统可以有效提高车辆的侧倾稳定性能及横摆性能。试验结果与仿真结果总体变化趋势大体相似,进一步验证了所提控制方法的实用性。
6 结论
(1)不同脉冲参数(幅值和频率)对车辆动力学性能有不同的影响,运用频率分析方法确定了最优的脉冲频率即为车辆运动的自然频率。
(2)设计了脉冲转向控制结构,运用CarSim 和Simulink进行联合仿真分析,验证了主动脉冲转向系统能有效提高车辆主动防侧翻的能力,车辆的侧倾因子能控制在指定的安全阈值范围[-0.8,0.8]内,车辆侧倾角峰值减小了25.4%;同时可改善车辆的横摆特性,质心侧偏角和侧向加速度在峰值处分别减小了46.8%、23.5%,且展现了比后轮主动转向更好的控制效果。
(3)安装并测试了液压脉冲发生系统,试验过程中,侧倾角和侧向加速度在峰值处分别减小了约23%和26%,此方法能提高整车的操纵稳定性。试验结果与仿真结果总体变化趋势大体相似,进一步验证了所提控制方法的实用性。
1KAPANIA N R, GERDES J C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling [J]. Vehicle System Dynamics, 2015, 53(12):1687-1704.
2RUBIN D, AEOGETI S A. Vehicle yaw stability control using active limited-slip differential via model predictive control methods [J]. Vehicle System Dynamics, 2015, 53(9):1315-1330.
3LACROIX B, LIU Z, SEERS P. A comparison of two control methods for vehicle stability control by direct yaw moment [J]. Applied Mechanics and Materials, 2012, 120: 203-217.
4赵万忠,李怿骏,于蕾艳,等. 融合助力转向功能的新型主动转向系统LQR控制策略[J]. 中国机械工程,2014,25(3):417-421.
ZHAO Wanzhong, LI Yijun, YU Leiyan, et al. LQR control for novel active steering system integrated electric power steering[J]. China Mechanical Engineering, 2014,25(3):417-421. (in Chinese)
5郝茹茹,赵祥模,周洲. 整车防抱死制动系统台架检测与道路对比试验[J]. 农业机械学报, 2013, 44(4): 21-26.
HAO Ruru, ZHAO Xiangmo, ZHOU Zhou. Bench detection and road comparison test for auto anti-lock braking system [J].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(4): 21-26. (in Chinese)
6杜锋,闫光辉,魏郎,等. 主动四轮转向汽车最优控制及闭环操纵性仿真[J]. 汽车工程,2014,36(7):848-852.
DU Feng, YAN Guanghui, WEI Lang, et al. Optimal control and closed-loop controllability simulation for active four-wheel steering vehicle [J]. Automotive Engineering, 2014,36(7):848-852. (in Chinese)
7宗长富, 陈国迎,梁赫奇,等. 基于模型预测控制的汽车底盘协调控制策略[J]. 农业机械学报,2011,42(2):1-7.
ZONG Changfu, CHEN Guoying, LIANG Heqi, et al. Vehicle chassis coordination control strategy based on model predictive control [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2):1-7. (in Chinese)
8KUO C C. Sports utility vehicle rollover control with pulsed active steering control strategy [D]. Waterloo: University of Waterloo, 2005.
9RAHMAN A A. Pulsed active steering HIL experiment [D]. Waterloo: University of Waterloo, 2009.
10VOS R. Evaluation of a pulsed active steering control system[D]. Eindhoven: Technische Universiteit Eindhoven, 2009.
11ZHANG Y B, KHAJEPOUR A, XIE X P. Rollover prevention for sport utility vehicles using a pulsed active rear-steering strategy [J]. Proc IMechE Part D: Journal of Automobile Engineering, 2015 doi:10.1177/0954407015605696.
12郭孔辉. 汽车操纵动力学[M]. 长春:吉林科学技术出版社,1991.
13刘学军,何仁. 电磁-液压复合防抱死制动系统滑模控制[J].农业机械学报, 2014, 45(5):1-7.
LIU Xuejun, HE Ren. Sliding mode control in electromagnetic-hydraulic hybrid anti-lock braking system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(5):1-7. (in Chinese)
14周兵,徐蒙,袁希文,等. 基于滑模极值搜索算法的驱动防滑控制[J].农业机械学报, 2015,46(2):307-311.
ZHOU Bing, XU Meng, YUAN Xiwen, et al. Acceleration slip regulation based on extremum seeking control with sliding mode[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(2):307-311. (in Chinese)
15BASLAMISLI S C, KOSE I E, ANLAS G. Handling stability improving through robust active front steering and active differential control[J]. Vehicle System Dynamics, 2011,49(5): 657-683.
Analysis and Test of Vehicle Stability Based on Active Pulsed Steering
Zhang Baozhen1Xie Hui1Huang Jing1Amir Khajepour1,2
(1.StateKeyLaboratoryofAdvancedDesignandManufactureforVehicleBody,HunanUniversity,Changsha410082,China2.CollegeofMechanicalEngineering,UniversityofWaterloo,WaterlooN2L3G1,Canada)
The active steering system can provide steering intervention to improve the vehicle handling stability. In order to improve the vehicle stability, a rear wheel active pulsed steering system was proposed and its performance was analyzed and verified by simulation and vehicle test. Firstly, a hydraulic pulsed steering system was designed and modeled. A simplified 2-DOF vehicle model was considered as the analytical model, and a rear suspension ADAMS model with the hydraulic pulse actuator was developed. Secondly, the effect of the steering system on vehicle stability was studied and the pulse signal parameters (frequency and amplitude) were evaluated to determine their optimum values. And then, a control structure and algorithm were designed, and the simulations were addressed based on CarSim and Simulink to verify the performance of the proposed system. Finally, a set of hydraulic pulse steering device was designed and assembled to carry out road experiments to assess the applicability of the proposed system. Results from simulation and test indicated considerable improvements in vehicle yaw stability can be achieved and also the roll angle was reduced for improving the vehicle rollover ability. Sideslip angle and lateral acceleration in the peak were reduced by 46.8% and 23.5%, which improved the vehicle lateral stability. Roll factor can be controlled in the set threshold limits [-0.8,0.8] and vehicle roll angle was decreased by 25.4%, the vehicle anti rollover ability was improved and showed a better control effect than the active steering system. The considerable improvements in vehicle stability can be achieved. The proposed system is a very promising for improving the vehicle stability.
vehicle; active pulse steering; handling stability; parameter identification; vehicle test
10.6041/j.issn.1000-1298.2016.09.049
2016-03-14
2016-04-08
“十二五”国家科技支撑计划项目(2015BAF01B01)
张宝珍(1988—),男,博士生,主要从事车辆主动转向控制与整车性能分析研究,E-mail: zbz19880113@163.com
谢晖(1971—),男,教授,博士生导师,主要从事车辆模具设计开发和智能装备研究,E-mail: danielxie@163.com
U463.4
A
1000-1298(2016)09-0366-08
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06 03:36:14
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
小学生学习指导·爆笑校园(2019年6期)2019-09-10 04:06:25
物理教学探讨(2018年1期)2018-02-13 09:26:52
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
航天器工程(2014年5期)2014-03-11 16:35:53
小猕猴智力画刊(2013年6期)2013-04-29 00:44:03
