一种电动舵机间隙参数自动测量方法*
2016-10-26 05:30:16江义王卓黄川
计算机与数字工程 2016年9期
江 义 王 卓 黄 川
(华中科技大学自动化学院 武汉 430074)
一种电动舵机间隙参数自动测量方法*
江义王卓黄川
(华中科技大学自动化学院武汉430074)
电动舵机间隙对系统的性能起着重要作用,但间隙角度小对精确测量提出了挑战。针对这一问题,论文采用了一种结合位移传感器和压力传感器。通过实时采集两者数据画出曲线,根据曲线计算出系统的间隙角度值,并利用PLC实现系统的自动化运行。实验结果表明,采用该方法能够有效地测量系统间隙角度参数。
电动舵机; 间隙; 位移传感器; 压力传感器
Class NumberTP391
1 引言
现代国防科技在国家发展过程中起着国家安全战略保障的作用,航空航天技术在国防技术中扮演着重要的角色[1~4]。电动舵机在航空飞行器中作为执行器得到了广泛的应用,电动舵机是飞控系统的伺服执行机构[5],随着对飞行器控制精度要求越来越高,对电动舵机技术也提出了更高的需求。而间隙非线性特性对系统运行起着重要作用[6~7],系统间隙过大会导致控制精度下降;系统间隙过小会导致运动摩擦力加大,机械结构磨损大等不利影响。因此在电动舵机伺服系统生产过程中需要保证适当的间隙。
随着控制技术的不断提高,对间隙参数的检测技术也在不断发展过程中。2012年北京机电工程研究所提出《一种适合于非线性舵系统的间隙测量方法》[8],并申请专利;2013年北京自动化控制设备研究所提出了《一种电动舵机间隙测试方法》[9],并申请专利。在该专利中,采用砝码和百分表来测量间隙。测试过程先将砝码悬挂在设置了百分表端的挂钩上,消除一端间隙,再将砝码悬挂至另一端挂钩,读取两次悬挂砝码后百分表的刻度值。间隙计算如下式所示。

上述介绍的测量方法中主要还是使用人工检测[10]的方法,在测量过程中存在着较大的不确定性。本文采用一种结合位移传感器和压力传感器的高精度检测方法,并设计一套自动化测试软件,实现间隙角度测量。完成间隙测量实验,验证测量方案、重复测量精度等实验。实验表明该方法能够有效地测量系统的间隙角度参数。系统设计高刚度测量杆与电动舵机输出轴进行连接,方便角度测量。
2 系统整体设计
2.1系统硬件设计
本测量系统以西门子s7-1200PLC控制器为核心,结合位移传感器和压力传感器进行位移和压力信号采集。PLC通过控制气动平移台的移动状态来控制压力传感器挤压测量杆的方向,进而实现压力给力的控制。在Windows7计算机端,结合Step7、WinCC等软件实现控制程序设计与交互界面设计。系统整体结构图如图1所示。

图1 系统结构图
2.2系统软件设计
系统软件主要基于Windows7 32位平台开发,控制程序开发使用Step7,人机交互界面使用WinCC软件开发。控制软件主要实现对气动平移台的移动控制,同时采集位移、压力传感器值,并对采集数据进行处理,并实现系统自动化运行过程;人机交互界面主要显示控制器通过以太网传输的采集数据曲线,显示计算结果,并且进行参数设置。系统自动化运行过程如下所示,测试界面如图2所示。

图2 自动化测试流程
3 测量系统设计
3.1测量系统实现
本设计中,两个位移传感器间距为常量,通过运动过程中位移传感器的变化换算得到间隙角度值,测量示意图如图4所示。由于间隙角度值很小,一般在10角秒左右,在计算过程中采用近似计算,计算公式如下式所示。
式中θ为间隙角度,Δd1为上端位移传感器位移差值,Δd2为下端位移传感器位移差值,L为两传感器之间的距离。
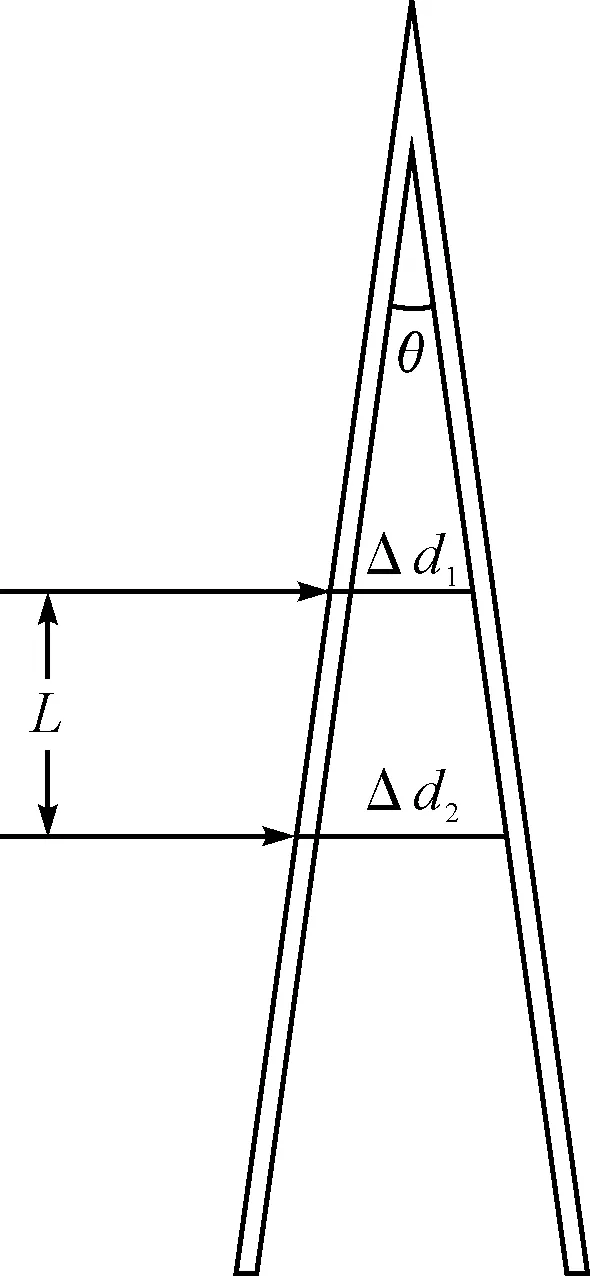
图4 测量原理图
系统中位移传感器为基恩士接触式传感器,测量过程中,首先将位移传感器测量部件推至于测量杆接触,并有一定压缩量,保证测量过程中位移传感器与测量杆的接触。然后移动右边气缸,右气缸与右连接杆运动带动右压力传感器向左运动,压力传感器不断挤压测量杆,当右压力传感器读数大于设定值时停止运动,气缸复位。再移动左侧气缸,左气缸与左连接杆运动带动左压力传感器向右运动,压力传感器不断挤压测量杆,当左压力传感器读数大于设定值时停止运动,气缸复位。如图5中测量原理所示,系统存储了气缸运动中采集的所有位移传感器和压力传感器的数值并绘制曲线,通过测量数据计算系统间隙角度的大小。

图5 测量系统图
3.2间隙测量方案验证
为了验证间隙测量系统的方案正确性,将测量杆固定在骏河精机旋转滑台上,旋转滑台能够给定固定角度(滑台每旋转一格约为55″),使用本测量方案对旋转角度进行测量,实验数据如下表1所示。

表1 算法验证数据
测量数据拟合后的曲线如下图6所示。图中虚线为旋转角度曲线,实线为测量计算角度曲线。由图可知两条曲线基本重合,在一定手动误差以及滑台固有误差情况下,测量算法正确。
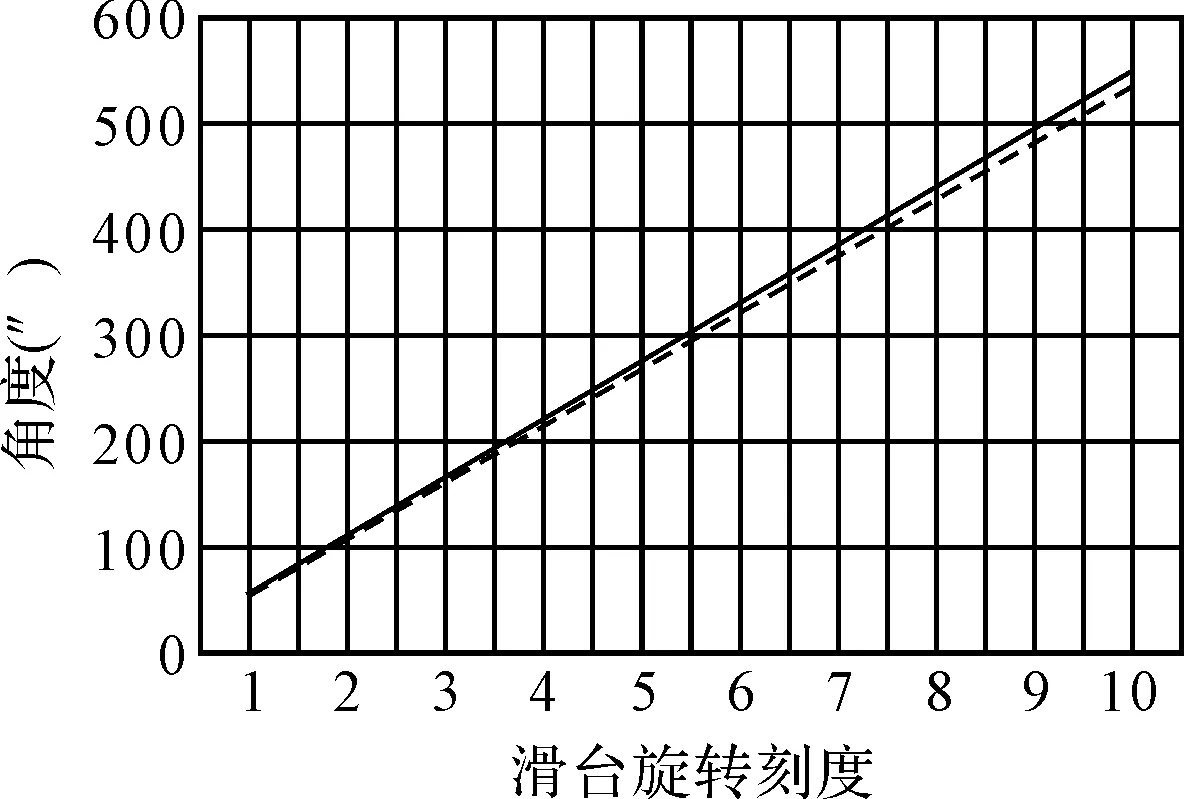
图6 测量数据拟合曲线
4 测量系统实验
测量系统实验在间隙模拟实验平台上完成,实验针对同一系统进行多次测量,对比多次实验结果,验证测量系统测量结果的稳定性。测量结果如表2所示。

表2 设定值5N实验结果
由实验数据可知测量变化范围在±4.5″,满足实际测量重复性精度需求。
5 结语
本文在现有常用手动使用砝码和百分表来测量间隙的基础上,设计了一种采用位移传感器和压力传感器来精确测量间隙角度和系统刚度的方案,结合PLC与PC机实现测量系统的自动化运行,解决了手动测量系统操作麻烦、测量精度不高的缺点,提高自动化检测水平。并且通过模拟平台与现实生产应用的检测过程,验证测量方案的正确性和系统的稳定性。
根据采集的位移传感器数据以及压力传感器数据,除了计算角度参数之外还可以计算系统的刚度参数,使得系统具有一定的功能扩展性。根据实际需求,本研究后期可以在实现刚度测量的方向做更进一步的努力。
[1] 汪军林,解付强,刘玉浩等.导弹电动舵机的研究现状及发展趋势[J].飞航导弹,2008(3):42-46.
WANG Junlin, XIE Fuqiang, LIU Yuhao, et al. The present situation and development trend of electrom-echanical actuator[J]. Aerodynamic Missile Journal,2008(3):42-46.
[2] Ueura K, Slatter R. Development of the harmonic drive gear for space applications[J]. European Space Agency-Publications-ESA SP,1999,438:259-264.
[3] Williams K, Brown D. Electrically powered actuator design (EPAD)[J]. NASA/USAF/Navy, Release, Nov,1997:97-274.
[4] 高荣华,徐军,章枧等.通用飞机电动舵机的设计[J].科技资讯,2014(3):127-129.
GAO Ronghua, XU Jun, ZHANG Jian, et al. The design of electromechanical actuator on the general aircraft[J]. Science & Technology Information,2014(3):127-129.
[5] 刘英,段富海,杨勇等.电动舵机自动测试系统的设计与实现[J].工业控制计算机,2006,19(12):61-62.
LIU Ying, DUAN Fuhai, YANG Yong, et al. Design and Realization of Electric Actuator Automatic Testing System[J]. Industrial Control Computer,2006,19(12):61-62.
[7]王乐.高速飞行器电动舵机伺服系统动力学仿真[D].哈尔滨:哈尔滨工业大学,2013:6-9.
WANG Le. Dynamic Simulation for Electromechanical Actuator Servo System of High-speed Vehicle[D]. Harbin: Harbin Institute of Technology,2003:6-9.
[8]北京机电工程研究所.一种适用于非线性舵系统的间隙测量方法:中国,CN201210273597.8[P].2012-12-19:2-7.
Beijing Institute of Electrical and Mechanical Engineering. A Kind of Measuring Method for Clearance of Nonlinear Electromechanical Actuator System: China, CN201210273597.8[P]. 2012-12-19:2-7.
[9]北京自动化控制设备研究所.一种电动舵机间隙测试方法:中国,CN201310151261.9[P].2014-10-29:1-5.
Beijing Institute of Automation Control Equipment. A Measuring Method for the Clearance of Electrome-chanical Actuator: China, CN201310151261.9[P].2014-10-29:1-5.
[10]申倩.航空谐波减速器性能测试装置研制[D].哈尔滨:哈尔滨工业大学,2014:2-3.
SHEN Qian. Development of An Equipment For Aeronautical Harmonic Reducer Performance[D]. Harbin: Harbin Institute of Technonogy, 2014:2-3.
An Automatic Measurement Method For The Clearance of Electromechanical Actuator
JIANG YiWANG ZhuoHUANG Chuan
(School of Automation, Huazhong University of Science and Technology, Wuhan430074)
The clearance of electromechanical actuator plays an important role in the system performance, while, it’s a challenge to have an accurate measurement for the small clearance angle. In order to solve this problem, this paper adopts a method that uses both displacement sensor and pressure sensor. Through real-time gathering the data the curve is drawed, then the clearance is calculated through the curve, and PLC is used to make it an automatic operation system. The experimental results show that this method can measure the clearance parameters of the system effectively.
electromechanical actuator, clearance, displacement sensor, pressure sensor
2016年3月8日,
2016年4月26日
江义,男,硕士研究生,研究方向:过程控制。王卓,男,博士,讲师,研究方向:网络控制系统,过程控制。黄川,男,硕士研究生,研究方向:过程控制。
TP391DOI:10.3969/j.issn.1672-9722.2016.09.043
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:55:14
小读者(2021年2期)2021-03-29 05:03:20
自动化学报(2019年6期)2019-07-23 01:18:36
模具制造(2019年4期)2019-06-24 03:36:42
汽车观察(2018年10期)2018-11-06 07:05:28
电子制作(2018年1期)2018-04-04 01:48:14
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
制造业自动化(2017年2期)2017-03-20 14:26:08
科技创新导报(2016年9期)2016-05-14 09:12:16