GNSS动态定位性能测试评估系统评价方法研究
2016-10-26 07:54:09丛佃伟信息工程大学导航与空天目标工程学院地理信息工程国家重点实验室
卫星与网络 2016年8期
+ 丛佃伟 信息工程大学导航与空天目标工程学院/地理信息工程国家重点实验室
GNSS动态定位性能测试评估系统评价方法研究
+ 丛佃伟信息工程大学导航与空天目标工程学院/地理信息工程国家重点实验室
定位性能是卫星导航系统性能的基础和核心,卫星导航系统定位性能评价贯穿于卫星导航系统的设计、研发、部署、运行和扩展等各个阶段。目前GNSS动态定位性能的评估常采用与静态定位性能一样的统计方法,论文针对GNSS动态定位性能评价方法展开研究,指出动态定位性能评估与静态定位性能评估的区别。采用测量不确定度理论研究GNSS动态定位性能测试评估系统指标确定方法,并依据测量不确定理论给出了我国北斗卫星导航系统动态定位性能评估系统应具备的性能。论文研究工作对我国卫星导航系统测试评估工作有借鉴意义。
全球导航卫星系统;动态定位;测试评估;测量不确定度
定位性能是全球导航卫星系统(global navigation satellite system,GNSS)的重要技术指标,也是衡量GNSS建设水平的重要标志。动态定位性能测试评估是卫星导航系统性能测试评估的重要组成部分。
国内外围绕GNSS定位性能测试评估工作开展了较多的理论研究、仿真实验与实际测试工作[1][2]。卫星导航系统动态定位、测速模式具有精度高、瞬时性、动态范围大、数据更新率高等特点,这些特点给GNSS动态定位性能测试评估带来了巨大的挑战。本文在研究现有评价方法基础上,从计量学角度出发提出采用测量不确定度理论进行GNSS动态定位性能测试评估系统的指标评价,并给出了北斗卫星导航系统(全球系统)测试评估系统需具备的性能。论文方法研究对于我国北斗卫星导航系统测试评估方法有重要借鉴意义。
一、目前常用GNSS动态定位性能指标评价方法
动态定位性能一般定义为:在规定时间段内,服务区内任一点的测量值与其准确参考值之差的统计值。目前主要采用GNSS实时动态差分(real-time kinematic,RTK)或动态精密单点定位(precise point positioning,PPP)系统作为评估基准[3][4]。
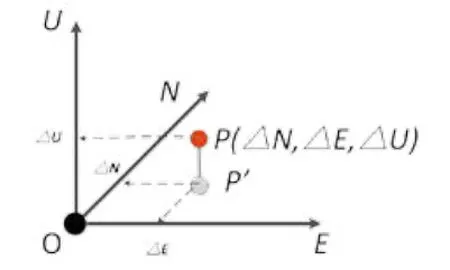
图1 定位误差计算示意图
定位性能包括水平方向(EN)定位性能、高程方向(U)定位性能和三维(合成)定位性能。采用将GNSS接收机的动态定位结果与评估基准的动态定位结果进行比较求差,转换到测站坐标系,可以得到GNSS接收机在水平方向和高程方向的动态定位偏差,在统计方法上习惯采用95%置信度或均方根(root mean squared,RMS)表示。如图1所示,若将评估基准获得的动态定位位置O点作为参考点,P点为测得的GNSS接收机坐标,△N、△E、△U分别为接收机坐标与评估基准坐标之差在站心坐标系下北、东、天方向的差值。将常用的95%置信度和RMS统计方法如下:
(1)95%置信度统计方法
水平方向动态定位性能评估量为:

高程方向动态定位性能评估量为:

对待评估数据中所有历元的水平定位误差或高程定位误差绝对值从小到大排序,取95%分位点处的数值作为95%置信度动态定位性能。
(2)RMS值统计方法
设共有n个测量值,其与评估基准值的误差值为(Δ1,Δ2,Δ3......Δn),则均方根误差表示为:
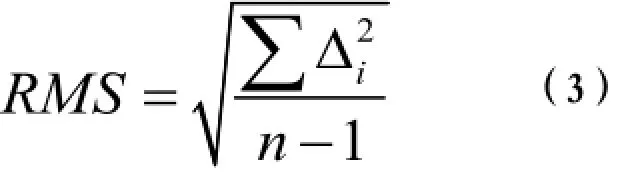
统计过程中还涉及粗差的判断与剔除,粗差判定标准的差异也会影响评定结果。
二、基于测量不确定度理论的GNSS动态定位性能指标评价方法
1963年,测量不确定度理论被美国国家标准局(NBS)的Eisenhart提出。1993年,由国际计量局(BIPM)、国际标准化组织(ISO)、国际电工委员会(IEC)和国际法制计量组织(OIML)组成的工作组颁布了《测量不确定度表示指南》(GUM),随后得到IUPAC、 IFCC、IUPAP三个国际组织的认可,指南统一规定了术语定义、概念、评定方法和报告的表达方式,是当前国际上表示测量结果及其不确定度的约定做法。测量不确定度的理论使不同学科、不同领域、不同国家、不同地区一致地表示测量结果及其不确定度。我国参考《测量不确定度表示指南》制定了国家计量技术规范《测量不确定度评定与表示》(JJF1059—1999),将其作为我国对测量结果和质量进行评定、表示和比较的统一准则。下面研究利用不确定度理论来进行GNSS动态定位性能测试评估指标评价。
根据《测量不确定度评定与表示》规范[5],标准不确定度是用标准偏差来表示的测量不确定度,标准(偏)差则可按照式(4)计算。
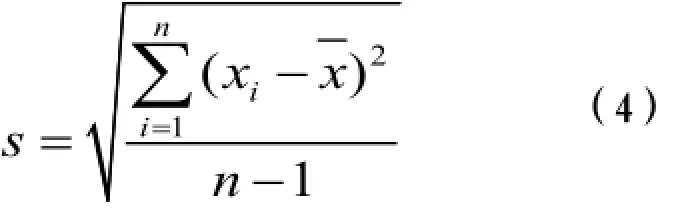
式(4)中,xi是对同一被测量进行n次测量的第i 次测量的数据,为n次测量结果的算术平均值,必须是在相同观测条件下进行的批量测量。式(4)与动态定位性能评估中常用的RMS值统计方法式(3)一致,适用于GNSS动态定位性能的静态评估。
由于动态定位性能评估的动态特性,不能保证相同的观测条件独立地进行n次测量,因此理论上式(4)不适用于GNSS动态定位性能的评估。此时可采用标准不确定度A类评定中的合成样本标准差 sp的解释,对同一测量过程,可以利用核查标准的办法,测量过程的合成样本标准差 sp表示为式(5)。
式(5)中si是每一次核查时候的样本标准差,k是核查次数,在动态定位性能评估试验中 k= 1,于是其标准不确定度如下式:
《测量不确定度评定与表示》中式(5)、式(6)的表述方法与测绘学科中以真误差表述中误差的概念一致[6],其描述为观测值独立等精度条件下的中误差计算式,如式(7)所示。

式中Δi为观测值与真值之差。
可以看出,利用真误差表述的中误差概念与《测量不确定度评定与表示》中式(3)的表述一致,该式与式(3)是有区别的。虽然当样本足够大时式(6)与式(3)的结果差别会很小,但还是应该从定义上区分GNSS动态和静态定位性能评估方法。
三、GNSS动态定位性能测试评估系统所需指标确定
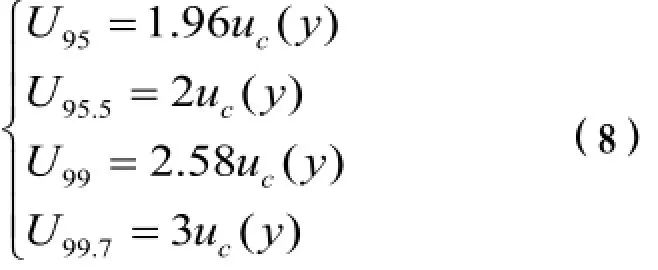
根据《测量不确定度评定与表示》规范[5],扩展不确定度是用来确定测量结果区间的量,将合成标准不确定度) 乘以给定概率p 的包含因子为扩展不确定度 Up,其表示期望在 y-Up至的区间内,以概率 p包含了测量结果的可能值。与 y的分布有关。当可以按照中心极限定理估计接近正态分布时,表示对于有效自由度以及与给定概率相应的t分布的t值),一般采用的值为99%和95%,当充分大时

从而分别得出:
当y的分布不是正态分布时,不确定度的描述方式较置信区间的概念更能反映测量数据中特大或特小误差的影响。估计值y的值与其合成标准不确定度 uc(y ) 或扩展不确定度 U最多为2位有效数字。
为了能够对北斗卫星导航系统动态定位性能进行评估,动态定位性能评估系统自身应具备更优的动态定位性能,依据《通用计量术语及定义》对校准测量能力的要求[7],用包含因子K为2的扩展不确定度作为能够提供的最高校准测量水平,如条件允许可设定K为3。
因此,从计量学角度出发,北斗动态定位性能评估系统以扩展不确定度指标对北斗卫星导航系统动态定位性能进行评价,包含因子K的数值可以根据条件确定为2或者3。
四、北斗动态定位性能评估系统指标确定
如表1所示,我国依据95%置信度发布北斗卫星导航系统区域系统定位性能指标[8],当北斗卫星导航系统任意点位定位性能服从正态分布时,依据式(8)可得到北斗卫星导航系统定位合成标准不确定度与95%置信度的关系为:
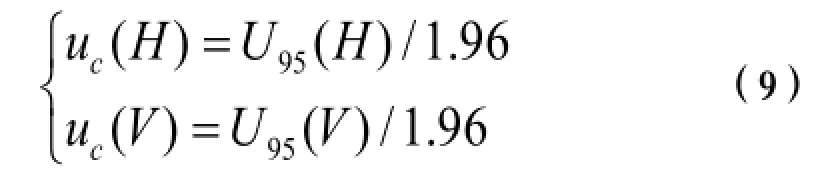
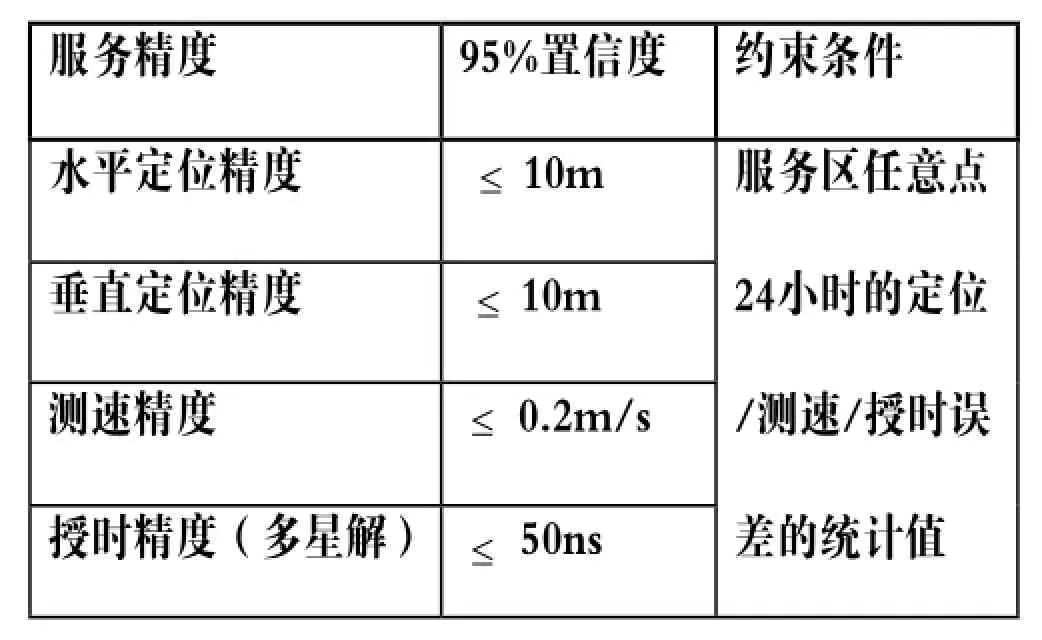
表1 北斗系统服务区内公开服务定位/测速/授时精度指标
式(9)中uc( H) 代表北斗卫星导航系统水平方向定位标准不确定度,uc( V )代表垂直方向定位标准不确定度。
根据对测量不确定度理论的分析,若用包含因子K =2的扩展不确定度表示,此时动态定位性能评估系统的不确定度要不大于北斗动态定位不确定度的1/2,根据式(9)可计算得到动态定位性能评估系统应具备的性能为:
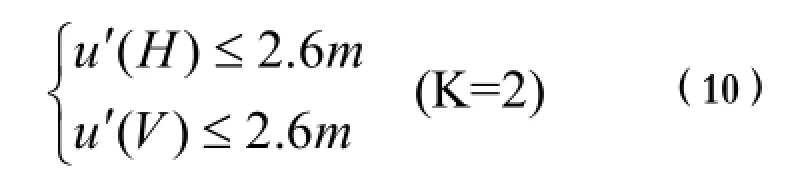
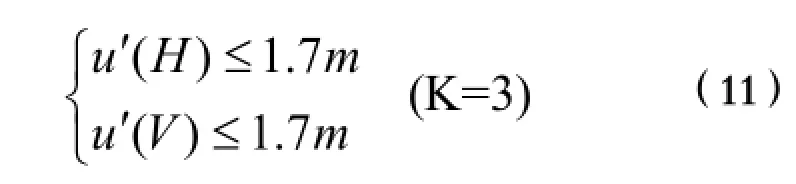
如条件允许,可设定K=3,此时可计算得到动态定位性能评估系统应具备的性能为:
2020年我国将要建成北斗卫星导航系统全球系统,其定位性能将比北斗卫星导航系统区域系统有所提高,目前国家尚未公布具体定位性能设计指标。假定北斗卫星导航系统全球系统公开位置服务指标是水平方向、垂直方向定位性能分别为,当包含因子K=2时,根据式(9)可计算得到动态定位性能评估系统应具备的性能为:
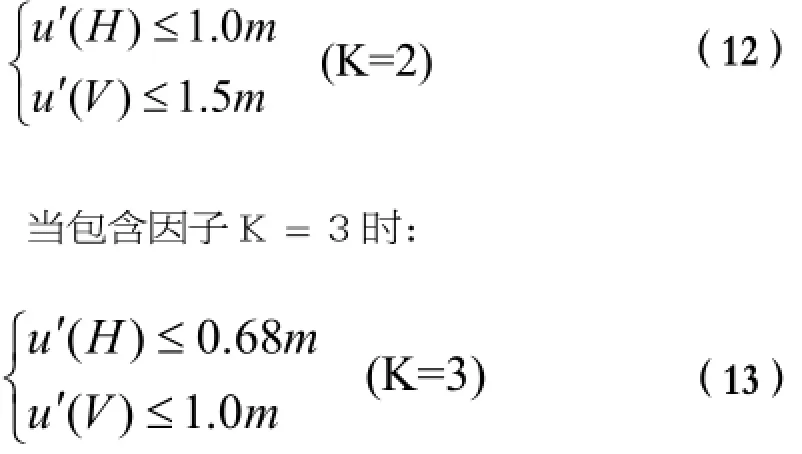
考虑到高动态条件下的高定位性能、高数据更新率技术的实现难度,如果北斗动态定位性能评估系统的定位性能达到式(12)水平时(K=2)便可认为具备GNSS动态定位性能评估能力。即水平方向定位不确定度优于1.0m,垂直方向定位的不确定度优于1.5m。
GNSS动态定位性能评估系统不仅需具备较高的定位性能,还应具备一定的数据更新率,参考国内外高动态卫星导航型接收机及板卡的性能指标,把数据更新率定义为不低于50Hz是合理的。
五、结束语
目前GNSS动态定位性能的评估常采用与静态定位性能一样的方法,论文采用测量不确定度理论研究了GNSS动态定位性能测试评估系统指标确定方法,指出了动态定位性能评估与静态定位性能评估的区别,并依据测量不确定理论给出了我国北斗卫星导航系统动态定位性能评估系统应具备的性能。论文研究工作是对GNSS动态定位性能评价方法的探讨,对我国卫星导航系统测试评估工作有借鉴意义。
【国家自然科学基金资助项目(41604032)】
[1] 丛佃伟.北斗卫星导航系统高动态定位性能检定理论与关键技术研究[D].郑州:信息工程大学,2016:6-15.
[2] TAYLOR R K, MDSE. Dynamic Testing of GPS Receivers[C]//ASAE Annual meeting.America,Kansas,
2003.
[3] 刘勇,宋志刚.GPS测量动态定位精度验收方法研究[J].全球定位系统,2005,(1):36-40.
[4] 雒喜平,向才炳,边少锋.GLONASS进展及定位性能研究[J].测绘通报,2012,(1):1-2.
[5] JJF1059-1999.测量不确定度评定与表示[S].北京:国家质量技术监督局,1999.
[6] 隋立芬,宋力杰,柴洪洲.误差理论与测量平差基础[M].北京:测绘出版社,2010:52-53.
[7] JJF1001-1998.通用计量术语及定义[S].北京:国家质量技术监督局,1998.
[8] 北斗卫星导航系统空间信号接口控制文件-公开服务信号(2.0版)[R].北京:中国卫星导航系统管理办
公室,2013.12.
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
卫星应用(2022年7期)2022-09-05 02:36:02
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
当代陕西(2019年18期)2019-10-17 01:48:50
环球慈善(2019年6期)2019-09-25 09:06:24
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14