卫星导航系统接收机原理与设计
——之九(下)
2016-10-26 07:48刘天雄
卫星与网络 2016年8期
+ 刘天雄
卫星导航系统接收机原理与设计
——之九(下)
+ 刘天雄
4.5基带数字信号处理
4.5.8.4导航电文解码
要成功解调出导航电文,接收机必须在信号跟踪过程中实现位同步和帧同步。接收机利用延迟锁定环DLL和频率锁定环FLL实现信号伪码相位和载波频率的精确估计,并动态地跟踪导航信号多普勒频移和测距码相位的变化,成功实现比特同步之后,接收机就可以解调同步位信息和导航电文。
为了译码导航电文,接收机还需要对导航电文进行帧同步和子帧同步处理,帧同步就是识别一个帧的起始和结束,同理子帧同步就是识别一个子帧的起始和结束。在比特同步之后只要识别出每帧的帧头就可以很容易获取导航电文中各个子帧在导航电文中的相对位置,当帧同步和子帧同步之后,对导航电文进行奇偶校验,最后再按照电文结构解读每一项的内容。
以GPS系统的导航电文为例,导航电文的基本单位是长1500 bit的一个主帧(Frame),一个主帧包括5个子帧(subframe),每一子帧都包含10个字(word),每个字长为30 bits,即每个子帧长300 bits。子帧1,2和3在每帧中重复,子帧4和5有25种形式(同样的结构,不同的数据),即1页~25页。导航电文的传输速率是50bit/ s,传输一个子帧需要6 Sec,传送完毕一个主帧需要30 Sec,所以,传输一个完整的导航电文(25个主帧)需要750 Sec(12.5 minute)。
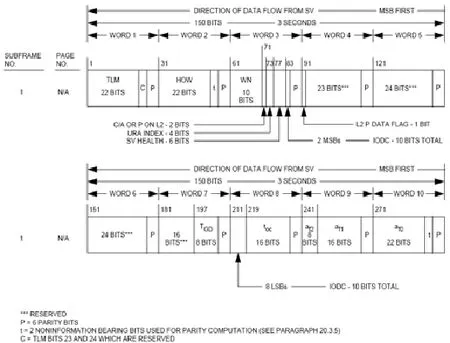
图55 子帧1数据格式
GPS系统导航电文子帧1数据格式如图55所示,每个子帧遥测字TLM(Telemetry Word)和交接字HOW(Hand Over Word)两个特殊的字开始。遥测字TLM是每个子帧的第一个字(word 1),每6s重复一次,包括8 bit的帧头(10001011),16 bit预留数据位(data)和6 bit奇偶校验位(parity),其中帧头用于帧同步,每个正确的帧头都标记了导航数据子帧的起始位置,主要作用是指明卫星注入数据的状态,作为捕获导航电文的前导,是各子帧同步的起点。因此,在进行电文子帧同步的时候,首先要搜索所获取的导航电文中帧头的位置,所搜索到的帧头还有可能是调制数据,为防止由此引起的误搜索,然后对遥测字TLM 30 bit的数据进行奇偶校验检查,然后再检查对交接字HOW的30 bit的数据进行奇偶校验检查,交接字奇偶校验检查通过后则可以提取出交接字的子帧ID号,正常子帧ID号是从1~5,上述所有检查通过后则可以正确识别子帧帧头的起始位置。
经过子帧同步和奇偶校验检查后,就识别出了每一帧的起始和结束位,然后将未解码数据送入译码器就可以读取导航电文参数了,导航电文就是指包含卫星星历、卫星历书、系统时间、星载原子钟改正参数、轨道摄动改正参数、电离层和对流层延迟改正参数、卫星工作状态、遥测码以及有C/A码确定P码交换码等二进制编码导航信息,导航电文是接收机定位解算的数据基础。
GPS系统采用地心惯性坐标系ECI描述卫星开普勒6个轨道参数,包括平均近地点M0、平均运动的校正值Δn、偏心率e、半长轴的平方根A1/2、升交点赤经OMEGA0、轨道倾角i0、近地点幅角ω、升交点赤经变化率OMEGADOT、轨道倾角变化率IDOT、对维度幅角余弦的校正值CUC、对维度幅角正弦的校正值CUS、对轨道半径余弦的校正值CrC、对轨道半径正弦的校正值CrS、对轨道倾角余弦的校正值CiC、对轨道倾角正弦的校正值CiS、星历参考时间toe,GPS卫星导航电文星历参数定义如表1所示,
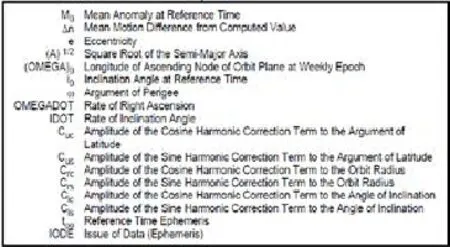
表1 GPS卫星导航电文星历参数定义
GPS系统导航电文子帧2和子帧3定义了上述星历参数数据。Block II和IIA卫星有效载荷的导航任务数据单元(MDU)至少存储60天的导航电文,当卫星无法在星上计算机内存中找到必需的有效控制或数据元素时,字3到字10中将交替传输1和0来代替正常的导航数据,这种默认操作简述如下:
(a)受影响的字的奇偶校验将无效;
4.培养学生自学自练和终身体育锻炼意识。在体育教学中,教师应有计划、有目的地创造必要的时间、空间与条件,放手让学生独立自主、生动活泼、主动积极地投身于体育锻炼。
(b)字10的两个尾比特将为0(使后面子帧的奇偶校验有效);
(c)如果问题是缺一个数据元素,那么只有有直接关系的子帧将被这样处理;
(d)如果一个控制元素无法被找到,默认操作将应用于所有的子帧,并且所有的子帧将在HOW中显示正确的子帧ID。一旦在卫星内存中或上传期间发生的控制元素失效,将导致卫星发送非标准码(NSC和NSY),表明导航信号不可用。
4.5.8.5基本观测量生成Generation of Basic Observables
跟踪电路在信号捕获的基础上利用频率锁定环(FLL)可以直接获得多普勒频率偏差,利用锁相环(PLL)获得信号瞬时相位估计值,并利用延迟锁相环(DLL)估计的伪码延迟数据计算卫星和用户接收机之间的伪距(pseudo-range)。
卫星有星载时钟,如果卫星在时刻t0播发了调制有测距码的导航信号,用户接收机有本地时钟,用户接收机在本地时刻t1接收到卫星信号,假设卫星时钟和接收机本地时钟时间完全同步,那么通过计算这个时间差”t1-t0”就能知道导航信号的传播时间Δt,导航信号的传播时间乘以无线电信号的传播速度就可以得到的卫星与用户机之间的距离,星地之间的距离观测过程如图56所示,
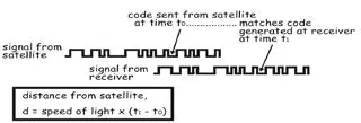
图56 星地之间的距离观测过程
卫星m和用户接收机之间的伪距计算公式可以表示为:

是以用户接收机时钟为基准的导航信号的接收时刻,接收时刻含有相对于绝对时间基准(例如GPS系统时)的误差、导航信号传播时延、接收设备时延以及热噪声;
是无线电导航信号的传播速度,即光速。
因此,星地之间距离的测量实质是测距码信号从卫星到接收机传播时间(时延)的测量。
卫星导航系统定位过程中存在三个时间系统,用户接收机的时间、导航卫星的时间以及卫星导航系统的参考时间,例如Galileo卫星导航系统的时间参考系统为“GST”(Galileo System Time),GPS全球定位系统的时间参考系统为“GPST”(GPS Time)。三个时间系统之间必然存在偏差,因此根据导航信号的传播时间得到的卫星与用户机之间的距离存在较大偏差,这也正是将测得的距离称之为伪距的缘由,在代入导航方程求解前必须予以修正。
现实中用户接收机时钟不可能与卫星星载原子钟保持同步,卫星采用高精度高稳定度的原子钟,而用户接收机则采用一般精度的石英钟,但这并不重要,也不需要同步,只需要知道用户接收机时钟与卫星星载原子钟之间的偏差即可,咱们可以把用户接收机时钟与卫星星载原子钟之间的偏差作为未知量来求解,最简单的方法就是通过增加观测卫星数量在定位方程中统一解算。
地面运行控制系统采取星地双向时间比对等技术,通过定时修正每颗卫星的时钟,可以实现轨道上所有导航卫星的时间与卫星导航系统的时间保持一致,或者说做到完全同步。因此,上文的假设是成立的!
具体测量星地之间距离时,用户接收机的时间可以预知,也可以假定一个具体的时刻,也就是说,只要知道导航信号发射的时刻就可以计算出伪距,即,关键环节是接收机在接收到导航信号的t1时刻必须知道卫星是什么时刻 !
怎么办呢?
事实上卫星导航信号电文的编排使得信号播发流程中的任意点都有自己的准确时间。一般情况下,卫星导航用户接收机利用接收到的每颗卫星的时间历元,外推以卫星钟为基准的导航信号的播发时刻(实现星地时间同步),进而得到导航信号的传播时间,注意每颗卫星都有一个独立的PRN测距码,基本概念如图57所示。周内秒计数TOW (Time Of Week)是卫星导航系统导航卫星播发导航信号的时间标记(time stamp),时间标记简称时标,时标记录在导航电文每个子帧的起始位置处。
以GPS系统L1频点C/A码信号为例,GPS系统导航电文的基本单位是长1500bit的一个主帧(Frame),一个主帧包括5个子帧(subframe),每个子帧有300个数据比特(data bit),每一个数据比特20ms,比特内有20个C/A测距码,每个C/A测距码长度为1023个码片(chip),码片速率(Chipping rate)为1.023 Mcps,C/A测距码信号周期是ms(约为1ms),每个码片对应时间1/1023 ms。在导航信号跟踪过程中码数控振荡器(NCO)将每个码片又进一步分为若干部分,这部分分辨率的大小与NCO的字长有关。接收机的任意一个采样时刻所采集到的卫星信号都会有上述几个不同部分,通过拼接后就能得到完整的卫星信号在空间中的传播时间了。由于不同接收机的设计会有差异,同时在电路处理过程中通常不是由一个环节来完成所有测量过程,这就出现了从某些单元或寄存器读取数据再拼接的情形。信号比特位同步以及帧同步后,接收机外推导航信号的传播时间过程如图58所示。
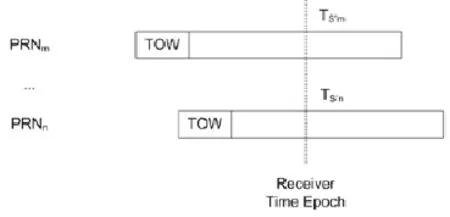
图57 接收机外推导航信号传播时间原理
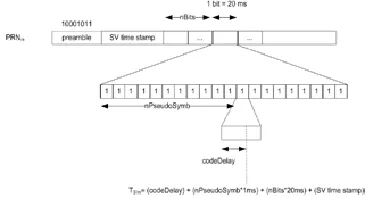
图58 接收机实现星地时间同步后,外推导航信号的传播时间
首先,根据导航电文的Z记数可以知道导航电文每一帧数据开始时对应的全球定位系统的时间GPST,Z计数实际是一个时间计数,它以每星期六/星期日子夜零时起算的时间计数,给出下一帧开始瞬间的GPS时。由于传输一个子帧需要持续6 Sec,所以下一个子帧开始的时间为6XZ Sec,用户接收机可以通过交接字将本地时间精确同步到GPS系统时间。
其次,帧同步后,我们对数据位、码周期数、半个码片滑动整数及小数部分分别进行计数,就可以精确地推算出接收到导航信号的t1时刻对应的导航信号的发射时刻,计算公式如下:
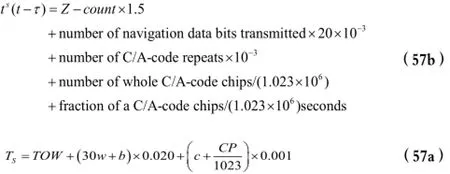
式中:TOW表示当前子帧所对应的周内时计数,w表示当前子帧中接收到的字数,b表示当前字中接收到的比特数,c表示当前比特中接收到的C/A码周期数,CP表示当前周期内码相位测量值。Ts是以卫星钟为基准的导航信号的播发时刻(单位为秒)。
小结:
伪距的测量:在接收机的跟踪状态下,经过数据解调后,读取本地参考时钟t1和卫星时钟的读数t2的差,即为卫星信号从卫星到用户的传播时间Δt,伪距d=Δt·c
伪距变化率的测量:利用相邻时刻间的多普勒频率的变化以及载波的波长即可估计。
对基带信号要经过比特同步处理,以得到电文数据。电文数据还要帧同步和子帧同步,再经过信道解码纠正传输中出现的错误并去掉冗余数据,对军用电文可能还要进行解密处理,才能得到导航电文中的有效数据。
猜你喜欢
大地测量与地球动力学(2023年2期)2023-02-04
数学小灵通·3-4年级(2021年9期)2021-10-12
中国金属通报(2021年9期)2021-08-06
小学生学习指导(低年级)(2020年10期)2020-11-09
中国外汇(2020年7期)2020-07-10
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
数学大王·中高年级(2017年2期)2017-02-08
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24