
存在数据丢包的航空发动机分布式控制器设计
2016-10-26 02:35宋军强黄金泉潘慕绚
航空发动机 2016年5期
宋军强,黄金泉,潘慕绚
(1.南京航空航天大学能源与动力学院,南京210016;2.中航工业航空动力控制系统研究所,江苏无锡214063)
存在数据丢包的航空发动机分布式控制器设计
宋军强1,2,黄金泉1,潘慕绚1
(1.南京航空航天大学能源与动力学院,南京210016;2.中航工业航空动力控制系统研究所,江苏无锡214063)
考虑航空发动机分布式控制系统中丢包问题,开展系统建模和稳定性分析,提出了带输入积分的状态反馈控制器,根据Lyapunov稳定性定理和LM I获得了一定丢包上界下的控制器求解定理。基于该控制器提出某涡扇发动机分布式控制系统丢包增益重构补偿策略,并开展仿真研究。结果表明:基于增益重构的丢包补偿措施,保证了存在数据丢包的发动机分布式控制系统的性能和稳定性。
分布式控制;数据丢包;输入积分状态反馈;线性矩阵不等式;航空发动机
0 引言
分布式控制是未来先进航空发动机控制系统发展的趋势。分布式控制有一系列优势,如系统减重、提高发动机性能、降低成本等,在国内外获得了众多研究者的关注[1-3]。在分布式控制系统结构中,串行通信总线将取代目前“点对点”的模拟线束连接方式,其性能显著依赖于通信总线的性能。总线串行数据传输将会在传感器、执行器和控制器节点间引入通信时延;同时,节点的瞬时故障、数据损坏、传输错误或编码/解码错误都可能会引起数据丢包[4],长时间的数据丢包将会降低控制系统的性能,甚至造成被控系统不稳定。因此,针对含数据丢包的分布式系统控制问题亟待解决。
在工业控制、网络控制领域中,含网络时延的系统鲁棒控制已得到研究者的关注和投入[5-7]。与之相比,随着近十多年发动机分布式控制系统的发展,针对其含时延的鲁棒控制研究也逐步得到重视[8-9]。
现有的航空发动机分布式控制方法研究基于H∞等鲁棒算法开展。本文考虑航空发动机作为安全关键系统,其分布式开展系统通信总线实时性要求使时间触发总线成为可行候选总线,将面向采用TTCAN时间触发型总线的发动机分布式控制系统,开展含数据丢包问题的控制器设计研究。首先,建立了含数据丢包的发动机分布式控制系统增广线性模型。依据Lyapunov稳定性理论,借助定性定理和线性矩阵不等式(Linear matrix inequality,LMI)方法,给出了在输入积分型状态反馈控制器作用下,具有给定丢包上界的被控系统稳定性判据。通过数字仿真研究,验证了控制器的动静态性能和对数据丢包的鲁棒性。
1 存在丢包的分布式系统描述
发动机分布式控制系统结构如图1所示。传感器和执行机构为智能节点,通过通信总线和控制器通信[10]。传感器和执行器与控制器间的网络时延分别为τSC、τCA,控制器的计算时延为τC;开关S1、S2、S3、S4位置分别表示网络的正常通信或数据发生丢包情况。

图1 具有时延和丢包的分布式控制系统
对于航空发动机分布式控制这类安全关键系统,国外相关研究建议采用时间触发型架构总线[10],使通信时延具有确定性。目前可能应用于航空发动机分布式控制的总线有TTP/C、时间触发型航空CAN总线、ARINC 825等[11],TTP/C最高带宽为25 Mbps、ARINC 825最高带宽为1 Mbps。因此按照时间触发的TDMA(时分复用)架构设计,控制用关键信号时延一般可保持在1个控制周期内。因节点通信故障导致的数据丢包则可能持续数个周期,下文将主要研究针对丢包的数据补偿措施。
2 存在数据丢包的控制器设计
2.1基于增广模型的反馈控制器设计
由于发动机模型是零型系统,干扰和发动机固有的非线性限制了状态反馈控制律的跟踪精度,会产生稳态误差。根据内模原理,在每个输入端加入积分器,使扩展后的模型为一型系统,通过引入积分控制,可以增强控制系统跟踪变化指令和抗干扰能力。NASA通用涡扇发动机模型C-MAPSS的控制器中也采用了这种带有输入积分的控制器设计,文献[12-14]对这一方法的描述较为详细。带有输入积分的状态反馈控制原理如图2所示,其中ut为控制输入目标值,u0为控制输入积分初值。
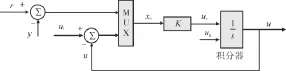
图2 带有输入积分的状态反馈控制原理
为了实现积分控制,采用以下增广对象描述
式中:ur为新控制输入。
增广的状态向量和矩阵定义为xa=[xTuT]T,ya=y,则

若已知原系统的矩阵,可计算获得相应的增广矩阵;若原系统渐进稳定,则增广系统亦保持渐进稳定[9]。
2.2存在丢包的系统建模
由于数据丢包是1个随机事件,因此建立系统动态模型较为困难。总线协议一般具有容错管理机制,如TTCAN总线中每个节点都设有错误计数器,当连续检测多个发送或接收错误时,节点进入相应的错误主动、错误被动、总线关闭状态,并发送错误帧告知其它节点[15]。因此可以假定数据丢包发生在最大允许连续丢包界内。通过迭代方法将系统建模为有界丢包内的切换系统。
假设S-C和C-A间的连续数据丢包数为η,则

假定含x(0)的数据包成功传递给控制器端,且C-A间无丢包,则

下一步,如果无丢包发生,则

否则

假定x(k)的连续更新时刻为0,k1,…,kj-1…kj,…,其中kj和kj-1的时刻差为2个连续成功传输的数据包时刻差,则基于更新步长kj-kj-1的网络控制系统可以写成

定义1个新的序列

则

其中,A(j)=Akj-kj-1+Akj-kj-1BKC+…+BKC
令i=kj-kj-1,假定最大允许连续丢包数为ηmax,则

则式(19)可以写成如下切换系统

引理1:对于一般离散系统,由李亚普洛夫稳定性定理可知,如果存在1个正定矩阵P,使得下面线性不等式成立,则系统渐近稳定[16]。

引理2:如果存在对称正定矩阵P,使得下面线性不等式成立,则系统(21)渐近稳定。

由引理1和Schur补引理可证,在此不作证明。
定理1:如果存在1个对称正定矩阵Q∈Rn×n,矩阵W∈Rn×n,满足以下线性矩阵不等式

对于i=1,2,…,ηmax,有

则具有如下输出反馈的闭环系统(8)可保持渐进稳定

利用引理2作等价代换即可证得定理1,具体参考文献[17],在此不再赘述。
因此,将增广模型(1)的矩阵代入定理1,则可通过求解矩阵不等式(12),得到一定丢包界下保持系统渐近稳定的反馈控制增益。
2.3数据丢包补偿措施
一旦发生数据丢包,可以采用2种常用方法来进行丢包补偿:
(1)保持输入:发生丢包时,执行器的控制输入u保持上一时刻的数值;
(2)重构控制增益:在每个控制周期,控制器会根据不同的反馈增益计算2个控制输入u和uη。其中u是采用不考虑丢包设计的控制增益,计算得到的控制输入,如基于增广模型利用最优二次型(LQR)方法求取反馈增益;uη是根据定理1求取的控制增益。通信正常时,执行器采用u作为输入,uη存储在执行器内存中,若执行器检测到S-C或C-A间的通信故障时,则采用uη,从而使得系统在最大连续丢包界,即ηmax×的时间内保持稳定,并减少性能退化。
3 仿真验证
选取某型涡扇发动机的低压转子转速nL和高压转子转速nH作为状态变量,主燃油流量Wf、尾喷管临界截面积A8作为控制输入,低压转子转速nL和涡轮落压比P36作为输出变量。则其小偏离线性化模型的状态量和控制输入为x=[△nL△nH]T,u=[△Wf△A8]T,y=[△nL△P36]T
则在增广模型中,状态量和控制输入为

根据图2搭建的仿真如图3所示。各节点运行周期为25 ms,发动机的输入输出信号在计算时均进行了归一化和反归一化。在执行机构节点注入通信丢包信号(图3中的Dropout)。控制器输出2路控制输入K1_Ur和K2_Ur(即为反馈控制矩阵K1和K2),在Actuator Compensation模块中进行增益调度补偿,Actuator Integrator为积分器环节,实现输入积分作用。

图3 针对非线性模型的掉包补偿仿真结构
在地面状态下,首先将某型发动机在中间状态下的小偏离线性化模型增广化,基于增广模型,利用LQR方法[7]求解正常通信时系统的反馈增益K1,利用LMI方法求取得丢包补偿重构增益K2。当发动机从95%~100%功率状态阶跃时,针对小偏离线性化模型设计反馈增益K1,如式(16),应用于非线性模型仿真,发动机高压转子转速和低压转子转速响应如图4所示。实现无静差跟踪。

图4 无丢包时,发动机非线性模型仿真结果


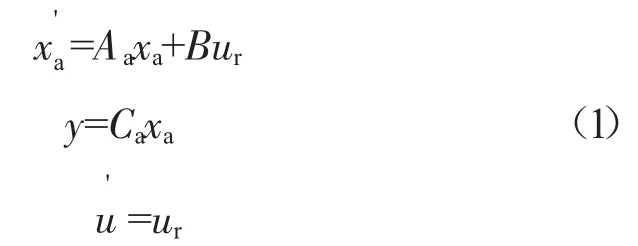
当ηmax=5时,设计重构增益K2如式(17),分别采用增益K1保持输入、重构增益K1/K2调度方法进行丢包补偿,发动机非线性仿真结果如图5所示。从图中可见,重构增益调度补偿方法可以保证发动机响应的性能和稳定性,较K1保持输入方法效果更为良好。

图5 当ηmax=5,发动机非线性模型仿真结果

当进一步增加系统丢包ηmax=15时,如图6所示,采用方法1已经无法保证系统稳定,而采用ηmax=10的重构增益K1/K2方法依然能保持系统的稳定和性能,因此该方法具有很好的鲁棒性。
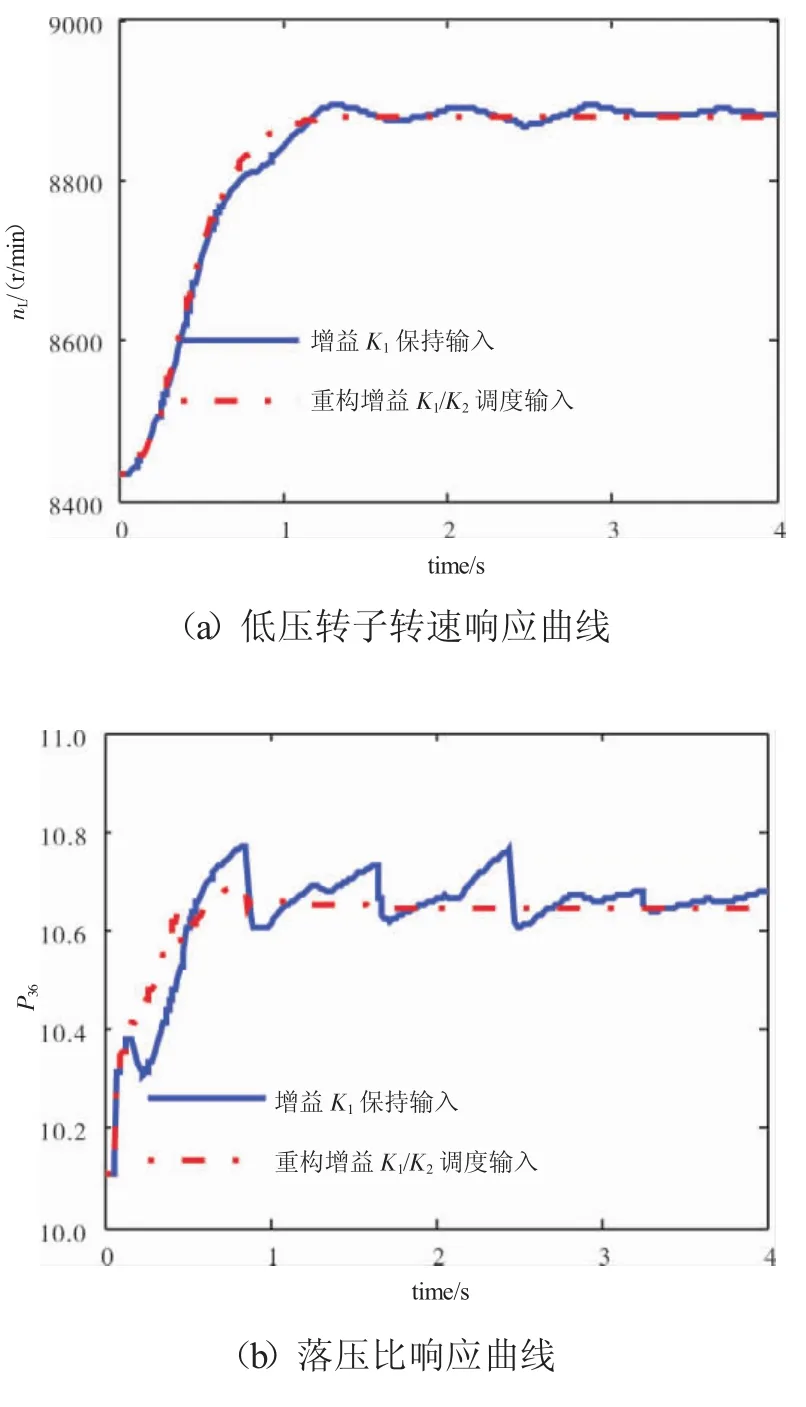

图6 当ηmax=15,方法2仍具有较强鲁棒性
4 结论
(1)基于定理1获得的带积分输入的反馈控制器能够保证带数据丢包的分布式控制系统渐进稳定。
(2)仿真结果表明,在数据丢包上界ηmax=5和ηmax=15时,所设计控制器均具有良好的鲁棒性。
(3)针对数据丢包的增益重构补偿方法相对于输入保持方法更具优越性,在丢包严重或长时间丢包下都能更好地保证系统的稳定性,改善系统性能。
因此,本文所设计控制器在保证被控系统具有良好的动静态特性的同时,对于分布式通信所带来的数据丢包具有良好的鲁棒性。
[1]Behbahani A,Tulpule B.Perspective for distributed intelligent engine controls of the future[R].AIAA-2010-6631.
[2]Culley D,Thomas R,Saus J.Concepts for distributed engine control[R].AIAA-2007-5709.
[3]郭迎清,章泓.航空发动机分布式控制系统综述[J].航空发动机. 2003,29(3):52-55. GUO Yinqing,ZHANG Hong.Survey of the distributed control system for an aeroengine[J].Aeroengine,2003,29(3):52-55.(in Chinese)
[4]Yedavalli R K,Belapurkar R K,Behbahani A.Design of distributed engine control systems for stability under communication packet dropouts[J].Journal of Guidance,Control and Dynamics,2009,32(5):1544-1549.
[5]Huang Z Q,Zhang Y X.Network time delay analysis for networked control systems[C]//Proceeding of the 2009 International Conference on Test and Measurement,Vancouver:Canada,2009.
[6]Khalil A F,Wang J H.A new method for estimating the maximum allowable delay in net-worked control of bounded nonlinear systems[C]// Proceeding of the 17th International Conference on Automation& Computing,University of Huddersfield,Huddersfield:UK,2011.
[7]Gao H J,Chen T W.Network-based H∞ output tracking control[J]. IEEE Transaction on Automatic Control,2008,53(3):655-687.
[8]王磊,谢寿生,彭靖波,等.航空发动机分布式控制系统不确定性鲁棒容错控制[J].推进技术,2013,34(6):836-842. WANG Lei,XIE Shousheng,PENG Jingbo.Uncertain robust H∞fault-tolerant control for aeroengine distributed control system[J].Journal of Propulsion Technology,2013,34(6):836-842.(in Chinese)
[9]李勇,黄金泉,潘慕绚.带时延等航空发动机分布式系统鲁棒控制[J].伺服控制,2013(12):39-44. LI Yong,HUANG Jinquan,PAN Muxuan.H∞ robust control for an aeroengine distributed control system with time-delay[J].Servo Control,2013(12):39-44.(in Chinese)
[10]Culley D.Transition in gas turbine control system architecture:module distributed and embedded[R].ASME 2010-GT-23226.
[11]Rama Y,Mike W,Alireza B.The role of various real-time communication data bus for open system distributed engine control architectures for the future[R].AIAA-2011-6145.
[12]杨刚,孙健国,李秋红.航空发动机控制系统中的增广LQR方法[J].航空动力学报,2004(1):153-158. YANG Gang,SUN Jianguo,LI Qiuhong.Augmented LQR method for aeroengine control systems[J].Journal of Aerospace Power,2004(1):153-158.(in Chinese)
[13]黄万伟,张加桢.用LQG/LTR方法设计航空发动机多变量控制器[J].航空动力学报,1995(3):98-100. HUANG Wanwei,ZHANG Jiazhen.LQG/LTR design methodology for a multivariable aeroengine controller[J].Journal of Aerospace Power,1995(3):98-100.(in Chinese)
[14]Richter H.Advanced control of turbofan engines[M].New York:Springer,2011:68-70.
[15]Levy M.Siemens drives CAN 2.0B specification[R].United Business Media LLC 0012-7515.
[16]郑大钟.线性系统理论[M].北京:清华大学出版社,2005:249-250. ZHENG Dazhong.Theroy of linear system[M].Beijing:Tsinghua University Press,2005:249-250.(in Chinese)
[17]Yu M,Wang L,Chu T,et al.Stabilization of networked control systems with data packet dropout and network delays via switching system approach[C]//43rd IEEE Conference on Decision and Control,Atlantis,Paradise Island,Bahamas.2004.
(编辑:赵明菁)
Controller Design for Aeroengine with Communication Data Dropout in DCS
SONG Jun-qiang1,2HUANG Jin-quan2,PAN Mu-xuan2
(1.College of Energy and Power Engineeing,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.AVIC Aeroengine Control System Institute,Wuxi Jiangsu 214063,China)
Considering the package dropout in the Distributed Control System (DCS)of an aeroengine,the system modeling and stability analysis were performed.A feedback controller with the input integral was presented.The Lyapunov theory and LMI were adopted to solve the controller for the distributed system with a given upper-bound time-delay.Based on the designed controller,a strategy of the controller gain reconstruction were presented and applied to a turbofan distributed control system.The results show the closed system with package dropout has the expected performance and stability under the designed feedback controller.
distributed engine control;package dropout;feedback control with input integral;linear matrix inequality;aeroengine
V 233.7
Adoi:10.13477/j.cnki.aeroengine.2016.05.002
2016-05-20基金项目:国家重大基础研究项目资助
宋军强(1972),男,博士,自然科学研究员,主要从事航空发动机控制技术研究工作;E-mail:junqiang.song@camci.com.cn。
引用格式:宋军强,黄金泉,潘慕绚.存在数据丢包的航空发动机分布式控制器设计[J].航空发动机,2016,42(5):8-13.SONGJunqiang,HUANGJinquan,PANMuxuan.ControllerdesignforaeroenginewithcommunicationdatadropoutinDCS[J].Aeroengine,2016,42(5):8-13.
猜你喜欢
湖南电力(2022年3期)2022-07-07
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
电子制作(2018年11期)2018-08-04
电子制作(2018年8期)2018-06-26
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
电子制作(2016年1期)2016-11-07
燕山大学学报(2015年4期)2015-12-25
