基于粒子群神经网络的声目标识别系统设计研究
2016-10-25 10:30:56刘亚雷于艳美孟春宁
电气自动化 2016年2期
刘亚雷, 于艳美, 孟春宁
(1.公安海警学院 机电管理系,浙江 宁波 315801; 2.宁波大学 科学与技术学院,浙江 宁波 315801)
基于粒子群神经网络的声目标识别系统设计研究
刘亚雷1, 于艳美2, 孟春宁1
(1.公安海警学院 机电管理系,浙江宁波315801; 2.宁波大学 科学与技术学院,浙江宁波315801)
为了提高声目标的自动识别率,开展了基于粒子群神经网络算法的声目标识别系统设计研究。首先给出了试验中粒子群优化算法的初始参数及算法流程;其次,分别设计了包含电源硬件、信号调理、铁电存储器、触发以及通信接口等电路的声目标识别硬件电路;最后,通过声信号采集试验及系统样机的制定,开展了目标识别试验研究,试验结果验证了声目标识别系统的有效性及稳定性。
声目标;粒子群优化;识别系统;样机;识别系统;识别率
0 引 言
声目标识别是智能交通系统的重要任务,具有重要的学术价值,同时将产生巨大的社会及经济效益[1]。在军事领域如何对各种轮式车辆、履带式车辆等进行分类识别,对现代战争中的地面侦察、战场态势感知、威胁评估、指挥决策及精确打击具有重要价值[2]。目前,对于民用声目标的探测识别主要采用光学手段[3],而对于军事声目标的探测识别技术有声探测[4-5]、地震波探测[6]以及电磁波探测[7]三种。其中声探测技术具有隐蔽性好、可全天候工作、没有雷达等工作盲区、系统结构简单、成本低廉及体积小等优势被广泛应用。上海交通大学针对复杂背景条件下声目标的自动识别问题,设计了一种基于模糊综合评判的声目标识别系统[8],南京理工大学根据战场典型目标声信号的特性,设计了基于DSP和小波变换的战场声目标快速识别系统[9]。随着电子技术的发展,声目标识别系统趋向于小型化及快速化,本文设计了一种基于粒子群神经网络算法的声目标识别系统及试验样机,通过试验分析了该样机对于坦克、直升机目标识别的有效性及稳定性。
1 粒子群神经网络优化算法
粒子群神经网络是粒子群优化算法和神经网络相互混合的一种神经网络模型[10]。本文给出了试验中粒子群优化算法的初始参数及算法流程,同时在试验中与传统的神经网络算法进行了对比分析。
1.1粒子群优化算法的初始参数设置
本文涉及的粒子群优化算法参数设置如下:
(1) 粒子数目。粒子数目越多,提高了系统的搜索时间,增加了计算量,但是,使得扩大了搜索空间的范围,易于得到全局最优解,本文结合前期的试验分析,粒子数目取值为30。
(2) 粒子范围。粒子范围由具体优化问题决定,本文试验中粒子的范围为问题参数取值范围。
(3) 粒子最大速率。粒子最大速率决定了粒子在一次飞行中可以移动的最大距离。本文试验分析中,粒子最大速率设置为:vmax=kxmax中的k=0.5。
(4) 学习因子。c1、c2表示粒子受社会知识和个体认知的影响程度,设定为相同值以给两者同样的权重c1=c2=2。
(5) 算法终止条件。通常,粒子群优化算法的终止条件设置为达到最大迭代次数或者满足一定的误差准则。
(6) 适应度函数。本文试验分析中直接把目标函数作为适应度函数。
1.2粒子群优化算法流程
粒子群优化算法的算法流程如下:
(1) 依照初始化过程,对粒子群的随机位置和速度进行初始设定;
(2) 计算每个粒子的适应值;
(3) 对于每个粒子,将其适应值与所经历过的最好位置的适应值进行比较,若较好,则将其作为当前的最好位置;

图1 粒子群优化算法基本流程图
(4) 对于每个粒子,将其适应值与全局所经历的最好位置的适应值进行比较,若最好,则将其作为当前的全局最好位置;
(5) 根据迭代方程式(1)和式(2)对粒子的速度和位置进行进化;
(6) 如未达到结束条件(通常为足够好的适应值或达到预设最大代数),则返回步骤(2),该算法程序流程图如图1所示。
2 声目标识别硬件系统设计
2.1声目标识别系统组成

图2 声目标识别系统功能框图
图2所示为声目标识别系统组成图。该系统描述了声信号的采集、信号存储以及信号处理等功能。由图可知,对于声目标识别系统而言,主要包含了电源硬件电路、信号调理电路、数据采集电路、存储电路以及系统触发电路几个模块。各个模块在芯片的控制下完成信号预处理、特征提取和分类识别过程。
2.2系统硬件电路设计
(1) 电源硬件电路设计

图3 电源硬件电路原理图
本文设计的声目标识别系统工作模式分为低功耗工作模式和识别工作模式,在低功耗工作模式下,只是维持系统的正常运动,使系统不断电,识别工作模式是在采集到信号后启动。因此,系统需要两种供电,分别是1.8 V和3.3 V。系统内核供电主要由1.8 V电源提供,而I/O引脚供电由3.3 V电源提供。这样设计的优点是减少了电平转换电路,从而使得I/O口直接和外部的低压器件连接。如图3所示为电源硬件模块原理图。为了维持电压的稳定,在电源引脚上接有电容。15 V电源经过电平转换芯片换成5 V电源,之后将5 V电源再次经过转换为3.3 V及1.8 V。
(2) 信号调理电路

图4 信号调理电路
本文设计的信号调理电路包含两个模块,一个是信号放大电路,另一个为滤波电路。在实际的信号采集环境中,由于环境噪声的干扰以及系统内部的电磁干扰影响,使得信号存在着一定的误差,严重的时候可能导致信号失真。信号调理电路的功能是提高声信号的信噪比。设计放大电路主要是由于本系统的A/D转换由系统内部芯片完成,对于输入电压的范围为在0~3 V,因此,需要对声信号的进行适当的调整。如图4所示,为信号调理电路硬件设计图。
(3) 铁电存储器
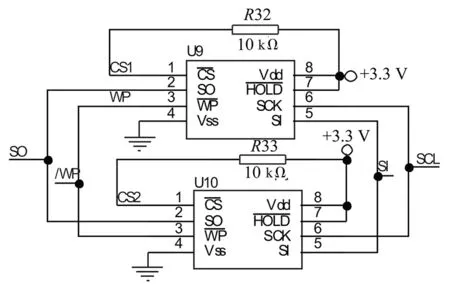
图5 铁电存储电路
声识别中需要的信号样本量较大,仅仅依赖于芯片内存不能满足实际的应用需求,因此,本文设计了存储器模块。该模块采用FM25L256芯片作为存储器,其存储容量为256 kB,频率高达25 MHz,同时还满足了RAM对数据读和写的速度。如图5所示,为系统存储器硬件电路模块。
(4) 触发电路
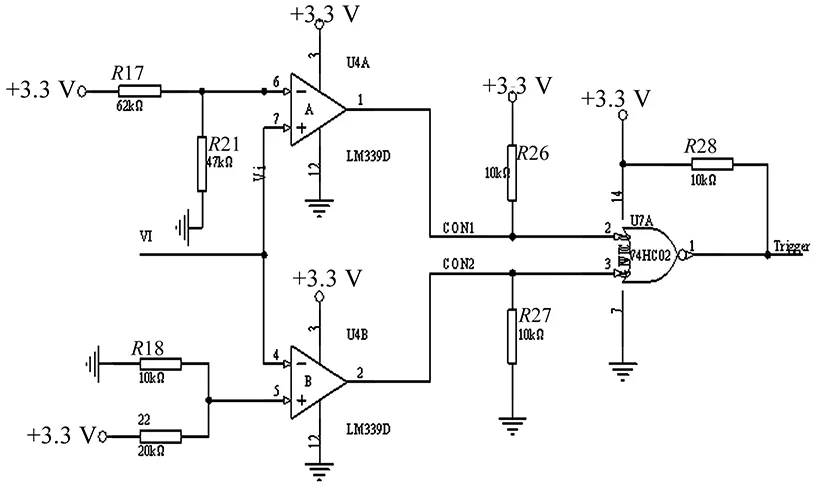
图6 触发电路
为了降低系统的误判率,提高系统的效能,本系统设计了触发电路模块。如图6所示,为本文设计的触发电路模块。模块用于触发A/D转换开关,实现系统对信号的采集。只有当输入电压达到一定的电平范围后,才会触发后续的数据采集电路。将输入信号电压和两个电压比较器进行电压比较,如果电压在两个电压比较器确定的正负范围内,则通过逻辑或门触发采集电路,系统开始数据采集并完成数据存储。如输入信号电压较低,说明周围声音信号不高,目标没有出现,系统处于待机状态,等待触发,以节省电源。
3 试验分析
3.1声目标识别信号采集试验

图7 装置位置图

图8 测试传声器阵列与声源相对位置图
声目标识别试验样机采用双层PCB板设计。本次试验采用四元声传感器组成直径为1 m的圆形阵列,试验过程中信号的采样频率为62.5 kHz,量程为10 V。本课题组前期分别采集了坦克、直升机的声信号,试验采用音响播放的方式模拟声目标,试验装置位置布置如图7所示,具体试验步骤如下:
(1) 将传声器阵列置于非同一波阵面内,传声器与声源相对位置按照图8所示,其中B平面为四元传感器(1、2、3、4)布置圆形平面,圆形阵列直径为1 m。
(2) 在静止声阵列对面的1#-11#的声源固定位置,对信号进行采集;
(3) 在静止声阵列对面的1#-11#位置匀速移动声源,对信号进行采集;
(4) 在静止声阵列对面的1#-11#位置随意移动声源,速度不一,对信号进行采集。
3.2声目标识别结果分析
基于粒子群神经网络优化算法,分别在静止状态、匀速运动状态及机动状态下选择声信号样本总数为:20、25、30、35、40、45、50,分别对坦克和直升机目标进行了识别试验。试验结果以样机中的目标类型指示灯信号为依据进行统计。同时,为了验证粒子群神经网络优化算法的有效性,与传统的神经网络算法进行了对比。表1所示,为直升机与坦克目标试验样机的识别结果。
(1) 声识别系统试验样机有效性分析。由表1 可知,无论是传统的神经网络算法还是粒子群神经网络优化算法应用在本试验样机中,其对坦克的识别率保持了在66.7%以上,对直升机目标的识别率保持了在73.3%以上,特别是结合本文的粒子群神经网络优化算法,坦克的识别率保持了在75%以上,对直升机目标的识别率保持了在84%以上,从而证实了无论基于传统的理论算法,还是基于改进的算法中,本文设计的声识别系统试验样机能够有效完成对声目标识别,而且能够保证识别结果的有效。

表1 直升机和坦克试验样机的识别结果
(2) 声识别系统试验样机稳定性分析。由表1 可知,基于传统的神经网络算法,对于坦克目标,随着样本总数的增加,识别率保持在66.7%~72%,平均识别率为68.8%,识别率方差为1.75%;对于直升机目标,随样本总数的增加,识别率保持在73.3%~80%,平均识别率为75.3%,识别率方差为2.2%;从而可以看出,本声目标识别试验样机在基于传统的神经网络算法中,识别率的波动程度较少,系统稳定。而在基于粒子群神经网络优化算法中,对于坦克目标,随着样本总数的增加,识别率保持在75%~88.6%,平均识别率为83.5%,识别率方差为4.12%;对于直升机目标,随样本总数的增加,识别率保持在84%~91.1%,平均识别率为87.3%,识别率方差为2.35%;同理可知,试验样机的识别率的波动程度较少,系统稳定。但是从识别率波动程度分析,由于基于粒子群神经网络优化算法相对于传统的神经网络算法计算复杂,计算量大,因此,相应的试验样机识别率的波动程度也增加。
(3) 不同目标的识别率分析。由表1可知,无论是基于传统的神经网络算法还是基于粒子群神经网络优化算法,声目标识别试验样机对直升机目标的识别率高于对坦克目标的识别率,这主要与声源的传播路径相关。从声信号的传播分析,与直升机目标相比,坦克目标到声阵列的距离要远低于直升机到声阵列的距离,因此,直升机声源更满足于点声源的条件。从声信号的采集分析,坦克声信号经过地面的反射以及环境噪声干扰强,采集到的声源信号信噪比低,因此,坦克目标的识别率低,从另一个角度分析,提高声源信号的信噪比,可以提高对声目标的识别率。
4 结束语
本文在软硬件设计的基础上,完成了基于粒子群神经网络算法的声目标识别系统样机的组装与调试,并以坦克、直升机目标为对象对试验样机的有效性及稳定性进行了实测验证。基于测试结果可知,该系统对于坦克目标识别率保持在75%~88.6%,平均识别率为83.5%,识别率方差为4.12%;对于直升机目标,识别率保持在84%~91.1%,平均识别率为87.3%,识别率方差为2.35%,试验结果验证了本文设计的声目标识别系统的有效性及稳定性。
[1] 李开明,张群口,罗迎,等.地面车辆目标识别研究综述[J].电子学报,2014,3(3):538-546.
[2] RAVICHANDRAN B, GANDLHE AVINASH. Robust automatic target recognition using learning classifier systems[J]. Information Fusion, 2007,8(3):252-265.
[3] 刘怡光.车辆识别若干基础算法与技术研究[D].成都:四川大学,2004.
[4] KIM ARILD STEEN,JAMES H. MCCLELLAN,OLE GREEN, et al. Acoustic source tracking in long baseline microphone arrays[J].Applied Acoustics,2015,1(87):38-45.
[5] 吕艳新,孙书学,顾晓辉. 基于EMD的和能量比的战场声目标分类与识别[J].振动与冲击,2008,11(27):51-55,61.
[6] 张珊珊,熊晓军,贺振华.基于地震资料的煤层识别方法及其应用[J].科学技术与工程,2015,15(6):21-25.
[7] 徐欣,王建宏.基于目标优先级的增量式雷达辐射源信号参数识别方法[J].科学技术与工程,2015,15(15):55-60
[8] 吉小军,施文康,张国伟.声目标模糊模式识别系统及原理样机实现[J].上海交通大学学报,2003,11(37):1728-1731.
[9] 唐海峰,李豪杰,张河.采用DSP和小波变换的战场声目标快速识别系统[J].兵工学报,2003,24(2):273-276.
[10] 吕艳新.被动声目标识别理论研究[D].南京:南京理工大学,2011.
Design Research of an Acoustic Target Recognition System Based on the Particle Swarm Neural Network
LIU Ya-lei1, YU Yan-mei2, MENG Chun-ning1
(1. Department of Electromechanical Management, China Maritime Police Academy, Ningbo Zhejiang 315801, China;2. College of Science and Technology, Ningbo University, Ningbo Zhejiang 315801, China)
In order to raise automatic recognition rate for acoustic targets, design research is carried out on the acoustic target recognition systems based on the particle swarm neural network algorithm. First, this paper gives initial parameters and algorithm procedure for the experiment on the particle swarm optimization algorithm. Second, it designs hardware circuits for acoustic target recognition, including circuits of power hardware, signal conditioning, FRAM, trigger and communication interface. Finally, through the experiment on acoustic target acquisition and making of the system prototype, we have made experimental research on target recognition. The experimental results validate the effectiveness and stability of the acoustic target recognition system.
acoustic target;particle swarm optimization;recognition system;prototype; recognition rate
国家自然科学青年基金项目 (61401105) 资助,浙江省自然科学基金资助(LY15E09004)
10.3969/j.issn.1000-3886.2016.02.035
TP391.4
A
1000-3886(2016)02-0115-04
刘亚雷,(1984-),湖南永州人,讲师/博士,主要研究领域:声目标识别、定位及跟踪技术。于艳美,(1985-),山东滨州人,助教/硕士,主要研究领域:声信号处理。孟春宁,(1985-),山东济宁人,讲师/博士,主要研究领域:目标识别技术、图像处理。
定稿日期: 2015-07-09
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
装备制造技术(2020年4期)2020-12-25 05:26:04
计算机工程(2020年3期)2020-03-19 12:24:50
中国听力语言康复科学杂志(2019年3期)2019-06-24 09:51:20
测控技术(2018年10期)2018-11-25 09:35:54
中国交通信息化(2018年3期)2018-06-13 03:27:58
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
时代农机(2016年6期)2016-12-01 04:07:20
中国交通信息化(2016年2期)2016-06-06 07:28:02
环境科技(2015年4期)2015-11-08 11:10:40