
模糊PID控制在电机中的应用与研究
2016-10-24 05:03武警工程大学研究生管理大队12队徐新国
电子世界 2016年18期
武警工程大学研究生管理大队12队 徐新国
武警工程大学信息工程系技术侦查教研室 陈军峰
模糊PID控制在电机中的应用与研究
武警工程大学研究生管理大队12队徐新国
武警工程大学信息工程系技术侦查教研室 陈军峰
磁场定向是矢量控制中必不可少的,但矢量控制严重依赖于电动机的数学模型,在电动机的矢量控制中,由于系统本身加上外在环境变化的影响,其运行参数常常发生变化,为提高系统控制品质,可对控制进行模糊化处理。通过建立电动机仿真模型,在MATLAB/ SIMULINK中改变电动机运行参数进行仿真实验。结果表明,通过模糊PID控制策略,可以产生更强的控制效果,有效提高系统的鲁棒性。
异步电动机;矢量控制;模糊PID控制;控制品质
0 引言
在工业控制系统中,无论控制的对象有多么复杂,大多数的控制回路都会采用PID控制算法。为获得一个满意的控制性能,单纯采用线性控制方式还是不够的,为此,许多不同的设计策略被提出,这些策略将线性PID控制器转化为PID型模糊控制结构。
1 模糊PID原理
1.1常规PID控制
在常规PID控制中,给定值与测量值进行比较,得出偏差e(t),并依据偏差情况,给出控制作用u(t),在连续时间域上,PID控制器具有如下形式:


式中,u(k)为第k次采样时控制器的输出;k为采样序号,e(k)为第k次采样时的偏差值;T为采样周期;e(k-1)为第(k-1)次采样时的偏差值[1]。离散PID控制算法有如下3类:位置算法、速度算法和增量算法。模糊控制器是内在非线性的,因此必须采取一些措施使它们尽可能地接近线性结构。PID控制器的离散形式包含所有以前时刻的控制误差值求和,不便于实现,较好的解决办法是采用第三类即增量算法作为控制器的输出:

式中:

1.2常规PID控制的启发
大多数的工业被控对象本身就有惯性或滞后特性,而且控制系统中被控对象动力学特性的内部也具有不确定性,加上外部环境的扰动,使控制问题复杂化。从物理本质上看,控制过程是一种信息处理及能量转移的过程。因此,控制系统设计的关键在于,以最短的时间和最小的代价实现系统按预定的规律进行能量转移,提高信息处理能力[2,3]。
而通过以上分析PID控制中的三种基本控制作用可以发现,它们实现的功能与人的行为有些类似。比例作用,实际上是一种线性放大(或缩小)作用,它有些类似于人脑的想象功能,人可以把一个量想象的大或小一些,但人的想象力具有非线性和时变性。积分作用,实际上是对误差信号的记忆功能。但这种记忆功能也不加选择的记住了误差,其中包含了对控制不利的信息,而人的记忆是具有选择性的。微分作用,反映了信号的变化趋势,和人的预见性有点类似,但这种预见性不善于对变化缓慢的信号进行预测,缺乏远见卓识。
所以,为了获得满意的控制系统性能,还必须引进一些非线性控制方式,通过对PID控制进行模糊化处理[4]可以很好达到预期效果。
2 电动机参数变化对磁场定向和系统性能的影响
磁场定向是实现矢量控制的前提和基础,而电动机参数值[6]如果在运行中发生变化,将直接影响到磁场定向的准确性,进而造成系统稳态和动态性能下降。因此,降低电动机参数变化的影响变得尤为重要。
转子磁链位置在矢量控制[7,8,9]中是一个非常重要的参数,没有它就无法进行Park变换和逆变换。因此,有必要寻找一种能够准确获得转子磁链位置的方法,在MT坐标系中,电动机的电流模型满足下面两式:

转子电压模型满足下式:

由式(1)(2)可得:

由(3)可得:

假定此时MT轴系已按转差频率法间接磁场定向,实际参数Rr、Lr和Lm的数值分别与给定值相符,于是可得到如图2所示的矢量图和相位关系。

图2 磁场定向时定、转子电流矢量图
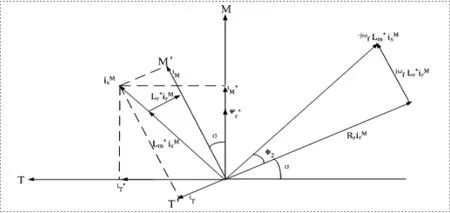
图3 磁场定向破坏后定、转子电流矢量图
3 实验结果及仿真
3.1搭建仿真模型
在Simulink环境下,利用Sim Power System Toolbox自带的模块库,在分析异步电机数学模型的基础上,可建立基于转子磁场定向的矢量控制系统仿真模型[12,13,14]。根据模块化建模的思想,将控制系统分割为各个功能独立的子模块,主要有:SVPWM模块、模糊PID控制模块、电流读取模块、转子速度/位置反馈模块、Clark、Park以及Park反变换模块。通过将这些功能模块有机结合,就可以搭建出仿真模型。
3.2进行仿真并分析仿真结果
(1)参数变化前电机给定转速与实际转速

图5 常规PID控制

图6 模糊PID控制
(2)参数变化后电机给定转速与实际转速
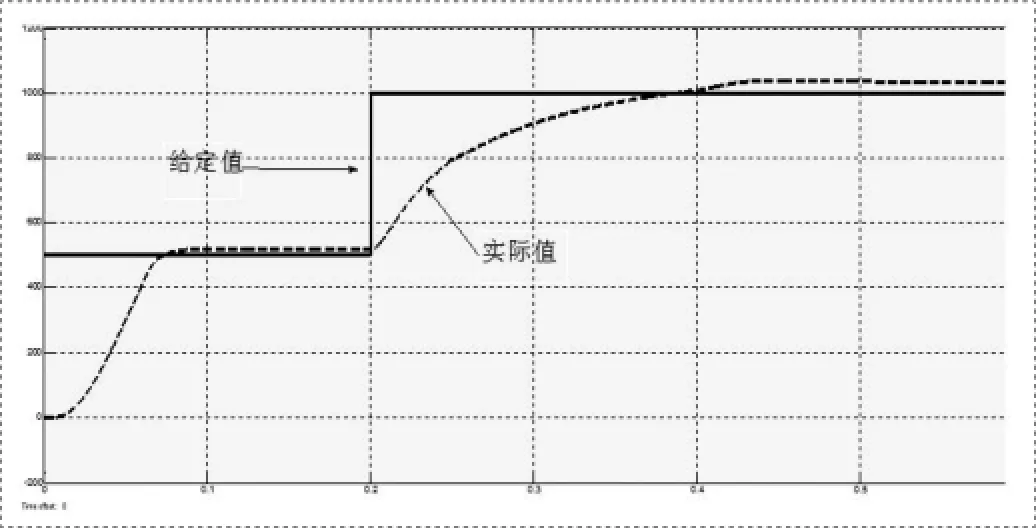
图7 常规PID控制

图8 模糊PID控制
4 结论
本文首先分析了异步电动机的数学模型,根据运行中可能出现的参数变化以及对系统稳定性的影响,结合模糊PID控制算法,对系统进行了仿真。分析仿真结果,可以看出,通过对PID控制进行模糊化处理,可以增强系统对不确定性因素的适应性,即鲁棒性,提高系统控制质量。
[1]Luiz Antonio de Souza Ribeiro,Cursino Brandao Jacobina,Antonio Marcus Nogueira Lima,et al.Parameter sensitivity of mrac models employed in IFO-Controlled AC motor drive[J].IEEE Transactions on Power Electronics,1997,44(4):536-544.
[2]徐占国.电动车用感应电机矢量控制系统的研究[D].大连:大连理工大学,2010.
[3]Ramu Krishnan,Aravind S.Bharadwaj.A review ofparameter sensitivity and adaptation in indirect vector controlled induction motor drive systems[J].IEEETransactions on Industrial Electronics,1991,6(4):695-703.
[4]杨立永,张云龙,陈智刚,等.基于参数辨识的PMSM电流环在线自适应控制方法[J].电工技术学报,2012,27(3):86-91.
[5]Boileau T,Leboeuf N.On-line identification of PMSM sparameters:parameters identifiability and estimators comparative study[J]. IEEE Transaction on Industry.
[6]刘洋,赵金,王庆义.间接矢量控制系统中的异步电动机参数辨识[J].电工技术学报,2008,23(7):22-26.
[7]孙大南,刘志刚,刁利军,等.牵引电机矢量控制转子磁场准确定向实时校正策略[J].电工技术学报,2011,26(9):116-123.
[8]樊扬,瞿文龙,陆海峰,等.基于转子磁链q轴分量的异步电机间接矢量控制转差频率校正[J].中国电机工程学报,2009,29(9):62-66.
[9]陆海峰,瞿文龙,张磊,等.一种基于无功功率的异步电机矢量控制转子磁场准确定向方法[J].中国电机工程学报,2005,25(16):116-120.
[10]王高林,杨荣峰,张家皖,等.一种感应电机转子时间常数MRAS的在线辨识方法[J].电工技术学报,2012,27(4):49-53.
[11]王瑞,赵金,丛喆,等.基于MRAS的转子时间常数辨识方法的参数敏感性分析[J].电气传动,2010,40(1):3-7.
[12]Liu Kan,Zhang Qiao,Chen Jintao.Online multiparameter estimation of nonsalient-pole PM synchronousmachines with temperature vatiation thracking[J].IEEETransaction on Industrial Electron ics,2011,58(5):1776-1788.
[13]杨宗军,王莉娜.表贴式永磁同步电机的多参数在线辨识[J].电工技术学报,2014,29(3):111-118.
[14]庞中华,崔红.系统辨识与自适应控制MATLAB仿真[M].北京:北京航空航天大学出版社,2009.
徐新国(1992—),男,在读硕士研究生,研究方向:信息与通信工程。
陈军峰(1968—),男,武警工程大学信息工程系技术侦查教研室讲师。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
制造技术与机床(2017年3期)2017-06-23
小学生导刊(2017年13期)2017-06-15
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
