
电子式软起动器仿真研究
2016-10-24 05:03国网湖南省电力公司桂东县供电分公司王小敏
电子世界 2016年18期
国网湖南省电力公司桂东县供电分公司 王小敏
电子式软起动器仿真研究
国网湖南省电力公司桂东县供电分公司 王小敏
电子式软起动器以其高性价比,在软起动器行业得到越来越广的关注,文章在分析三相调压原理的基础上搭建MATLAB仿真模型,将斜坡升压软起模式和限电流软起动模式进行仿真分析,对于电子式软起动器的研究具有一定的参考意义。
软起动器;限电流;三相调压;MATLAB
0 引言
当前在电力拖动中广泛应用软起动器对异步电机进行起停控制,软起动器中,电子式软起动器以性能优越,价格适中,得到了广泛的使用。其性能款式多样,起动模式也具有多样化,适用于多种场合。电子式软起动器采用三相调压原理,集现代电力电子技术和先进控制技术于一体,且逐步往智能化、节能化和高起动转矩方面发展[1]。对软起动器现在广泛使用的斜坡升压软起模式和限电流软起动模式进行仿真分析,对软起技术的进一步研究具有一定的实际意义。
1 三相交流调压原理
把一对反并联晶闸管串接在交流电路中,通过对两个晶闸管开通相位的控制,在不改变交流电频率的前提下调节输出电压的有效值,这种电路称为交流调压电路[2]。交流调压电路广泛用于异步电机的软起动、异步电机调速以及调光台灯、舞台灯光控制等场合,在电力系统中也常用于对无功功率的无极调节。
三相交流调压电路根据三相联接形式的不同具有多种拓扑结构,如图2.7所示。其中心型联结电路和支路控制三角形联结是最常用的电路结构[3]。本文采用的拓扑结构为心型联结电路,如图1a)所示,按是否有中线,分为三相三线和三相四线两种不同的电路结构。三相四线电路中性点中有比较大的3次谐波电流和3的整数倍次谐波电流,当导通角为90°时,中性线电流约等于各相电流的有效值 ,电路结构相当于三个单相电路的组合。

图1 三相交流调压电路(a)带中性线的星形联结;(b)三角形联结;(c)三相三线交流调压联结;(d)载中点控制三角形联结。
三相三线交流调压电路中,任一相在导通时必须和另一相构成回路,任意两相之间的导通则是通过线电压完成,而线电压超前相电压30°,所以导通角移相范围为0~150°[4],晶闸管应采用双脉冲或宽脉冲触发。三相晶闸管的触发脉冲信号依次相差120°,而同一相的两个反并联晶闸管的触发信号相差180°。为了确保的电路输出电压能够对称并有相应的移相范围,晶闸管的触发信号相序和相位差必须与电源电压一致。此外,在感性负载或小导通角情况下,要求采用控制角大于60°的双脉冲或宽脉冲触发电路以保证晶闸管的可靠触发。图1中所示的四种交流调压电路的性能对比如表1所示。

表1 相调压电路接线方式及性能特点
2 直接起动
仿真采用的电源电压分别为:

仿真模型和仿真结:
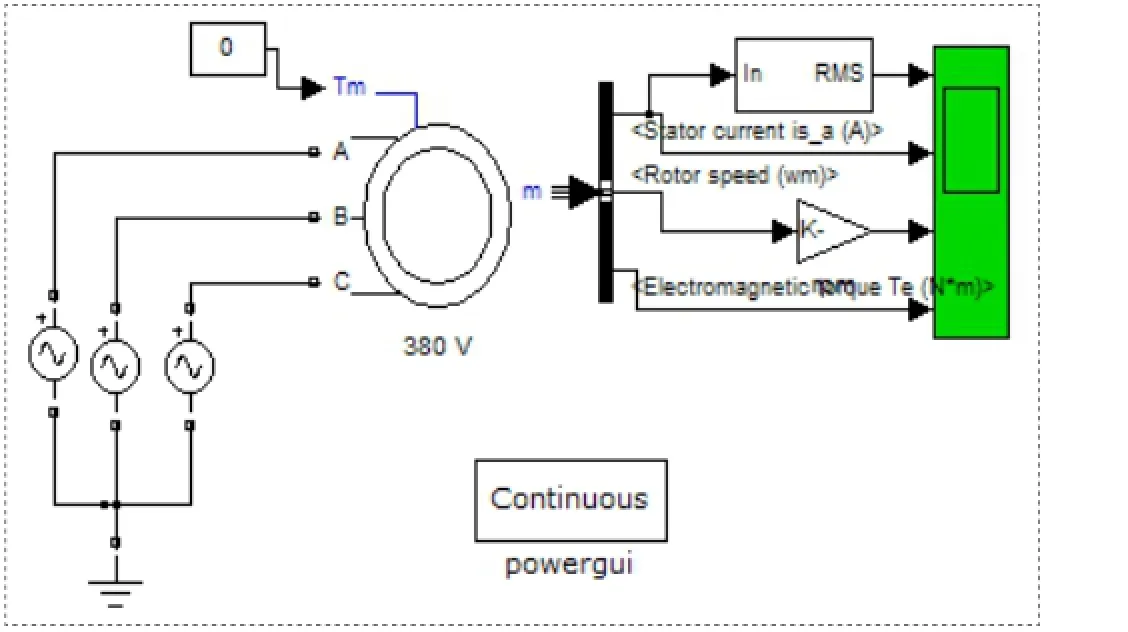
图2 直接起动仿真模型

图3 异步电动机直接起动曲线
从图3中可以看出,异步电动机直接起动时,起动电流很大,起动电流最大有效值约为100A,稳定运行电流约为10A,电流比高达约10倍。起动转矩在-90N*m到383N*m之间波动,特别是起动初期波动最大。电动机起动过程约0.3s就能完成,起动速度很快。
3 斜坡升压软起动
斜坡升压软起动过程中,开始时,定子端电压迅速提高到设定的起始电压U1,以保证有足够的起动转矩,然后以设定的上升曲线逐步无极升高定子端电压,电动机转速上升,直到转速达到额定转速、定子电压为额定电压,起动过程完成。
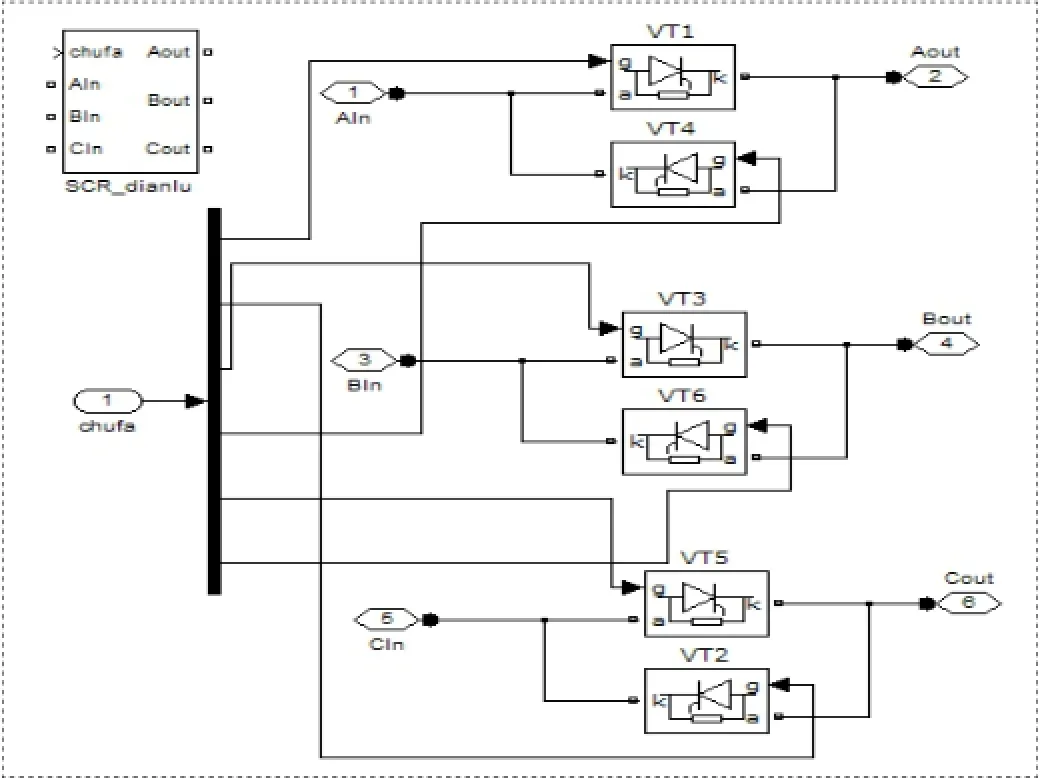
图4 斜坡升压软起动主电路
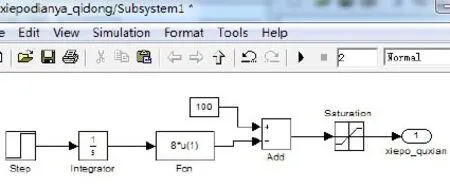
图5 斜坡给定曲线控制系统
主电路如图4所示,左上角为封装的子系统,其余部分为内部子系统,其中六个晶闸管的触发导通顺序依次为VT1-VT2-VT3-VT4-VT5-VT6,VT1与VT4构成A相主电路,VT3与VT6构成B相主电路,VT2与VT5构成C相主电路。斜坡升压软起动,通过调节晶闸管的导通角,开环控制晶闸管的输出电压。
斜坡升压软起动通过给定晶闸管的导通角来控制输出的电压,达到降压软起动的效果。给定曲线控制子系统如图5所示。
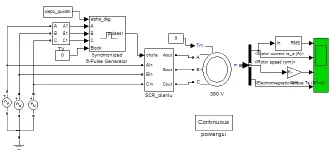
图6 斜坡升压软起动仿真总图
如图6所示,仿真系统包括三相电源模块、电压同步信号采集模块、6脉冲信号发生模块、晶闸管电路、异步电动机、信号给定模块和测量模块组成。

图7 斜坡软起动仿真曲线
由图7可以看出,通过斜坡升压控制异步电动机起动时,起动电流最大值(有效值)约为60A,稳定值约为10A,电流比为6,与直接起动的10倍电流相比,电流很大的下降;最大起动电磁转矩约为180N.m,比直接起动小很多。
4 限电流起动
限流起动仿真模型如图8所示,与斜坡升压软起动不同的是引入了一个电流闭环控制。通过输出的电流来控制晶闸管的导通角,从而实现限流软起功能。

图8 限电流仿真图
限流控制封装模块内部结构如图9所示,电流反馈信号I_back与限流设定值Im作差,偏差值通过一个滞环比较器转换为布尔量,若反馈量大于设定值,则输出0,反馈量小于设定值时则输出为1。此输出值与电压上升速率控制constant1通过一个积分,得到一个初值为0的线性递增信号。起动电压给定值与积分输出递增信号作差,偏差值经一个饱和限制器限制输出范围,out1即为晶闸管的触发角。

图9 限流控制模块
仿真结果如图10所示,由图可以看出,定子电流最大值为50A,整个启动过程电流值都在其之下,最大电磁转矩约为120N. m,与斜坡升压软起动相比,电机的转速上升很慢,从开始起动到稳定运行约历时0.8s,与斜坡电压相比要慢。
5 仿真结果对比分析
从图3的直接起动仿真结果与图6的斜坡升压软起动模式和图10
的限电流软起仿真结果相比,不难看出直接起动时,起动电流很大,起动转矩不大。主要是因为直接起动时,功率因素底。整个起动过程比较块,电机的上升速度比较块。而软起动时,起动电流要明显比直接起动时要小很多,能够有效减小对配电网的电流冲击,电机转速上升很平滑,起动过程平稳。但是起动转矩比直接起动还小,所以电机起动过程变慢。起动电流限制的越低,起动过程历时越长。
6 结语
本文对现在在中小容量电机起动领域使用广泛的电子式软起动器进行了仿真分析。以电压斜坡软起动和限电流软起动为例,搭建Matlab仿真模型,并与直接起动方式相比,验证了软起动器的优缺点,对于软起动器的研究具有一定的参考意义。
[1]陈舟,叶建兴.电动机新型软起动设备分析[J].电子世界,2015(14):27-28.
[2]白雪峰,李沛.单相交流调压电路实验装置的研制[J].实验技术与管理,2006(7):46-48.
[3]胡红明.异步电机软起动研究[华中科技大学博士学位论文].武汉:华中科技大学,2010.
[4]李林鸿.交流异步电动机模糊自适应软起动控制的研究[辽宁工程技术大学硕士学位论文].辽宁阜新:辽宁工程技术大学,2011.
王小敏(1965—),大学本科,国网湖南郴州供电公司高级工程师,研究方向:电力系统及其自动化。
猜你喜欢
四川电力技术(2022年6期)2023-01-31
电力自动化设备(2022年11期)2022-11-19
现代信息科技(2022年20期)2022-11-17
煤气与热力(2022年2期)2022-03-09
电气技术(2022年1期)2022-01-26
广东电力(2020年12期)2021-01-05
甘肃教育(2020年20期)2020-04-13
舰船电子工程(2019年11期)2019-11-28
电子制作(2018年2期)2018-04-18
山东工业技术(2016年15期)2016-12-01
