简析边缘检测原理在车道偏离报警系统中的应用
2016-10-21 23:25张一李玮李龙
科学与财富 2016年9期
张一 李玮 李龙


摘要:车道偏离报警系统属于高级的驾驶辅助系统范畴,通过报警的方式减少汽车因车道偏离而发生交通事故的系统。边缘检测的目的是将图像中灰度发生显著变化位置上的点提取出来。这一类点通常可以用来表征物体的轮廓。在车道偏离报警系统中,边缘检测的结果是整个系统工作的基础,表征车道线边缘的边缘点越多,与车道线无关的边缘点越少,车道线参数计算也就越准确。
关键词:车道偏离 报警系统 边缘检测
本文在研究在车道偏离报警系统时采用的是sobel边缘检测器进行边缘检测技术。
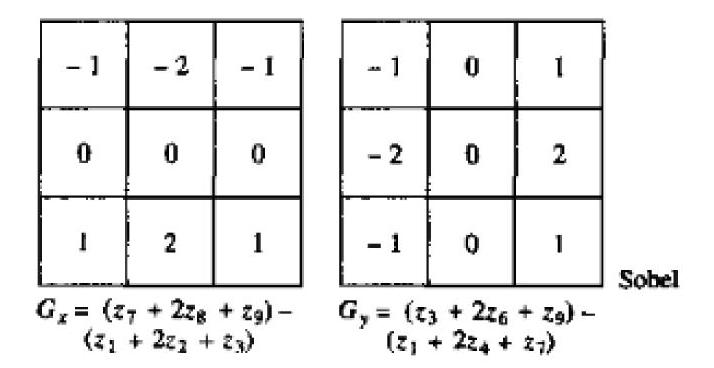
Sobel边缘检测器使用图中的掩模来数字化的近似一阶导数值Gx和Gy。在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。在图像的任何一点使用此算子,将会产生对应的梯度矢量。由于图像边缘附近的亮度变化比较大,所以可以把那些在邻域内灰度超过某个值的像素点当作边缘点。
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。Gx及Gy分别代表经横向及纵向边缘检测的图像。
换言之,一个邻域的中线点处的梯度可由Sobel检测器按如下方式计算:
使用图中左边的掩模对图像f进行滤波,得到一阶近似导数Gx的值,即点(x,y)在水平方向的偏移量。
再使用右边的掩模对图像f滤波, 得到一阶近似导数Gy的值,即点(x,y)在垂直方向的偏移量。
然后計算每个滤波后的图像中的像素值的平方,并将两幅图像的结果相加计算相加结果的平方根,得到该点的梯度矢量值。
选取合适的阈值T,若新像素灰度值≥T,则判读该像素点为图像边缘点。
即:
因此,我们说若在位置(x,y)处g≥T,则在该位置的一个像素是一个边缘像素,其中T是一个指定的阈值。
用一帧道路图像进行边缘检测,原始图像和经过处理后的图像如下图所示。
从上图中可以看出边缘检测提取出一帧图像中大多数物体的边缘点,图像中只剩下黑色的背景和白色的边缘点,因此大大减少图像的信息量。在车道偏离报警系统中,边缘检测的最重要的作用就是将车道线的边缘点提取出来,然后由后续图像处理模块进行处理。
参考文献:
[1] 孙蔚,王靖,王波.改进的Sobel算子彩色图像边缘检测[J]. 电子技术应用. 2013(02)
[2] 袁春兰; 熊宗龙; 周雪花; 彭小辉. 基于Sobel算子的图像边缘检测研究[J]. 激光与红外.2009(01)
[3] 章毓晋编著.图像工程[M]. 清华大学出版社, 2006
[4] (美)RafaelC.Gonzalez,(美)RichardE.Woods,(美)StevenL.Eddins著,阮秋琦等译.数字图像处理[M]. 电子工业出版社, 2005
作者简介:
张一 男 1982年8月 宜宾职业技术学院 五粮液职业技术学院 助教 本科 四川 644003 研究方向:电磁场与微波 嵌入式控制
李玮 女 1981年2月 宜宾职业技术学院 电子信息与控制工程系 讲师
李龙 男 1988年7月 宜宾职业技术学院 电子信息与控制工程系 助教
猜你喜欢
物联网技术(2016年12期)2017-01-21
现代电子技术(2016年22期)2016-12-26
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
东方教育(2016年4期)2016-12-14
软件导刊(2016年9期)2016-11-07
科技视界(2016年9期)2016-04-26
现代电子技术(2015年11期)2015-07-28