基于个体特性的驾驶行为操纵模式建模方法
2016-10-19 01:37:17肖献强殷延杰王家恩
中国机械工程 2016年19期
肖献强 殷延杰 王家恩
合肥工业大学,合肥,230009
基于个体特性的驾驶行为操纵模式建模方法
肖献强殷延杰王家恩
合肥工业大学,合肥,230009
为研究能体现驾驶人个体特性的驾驶行为操纵模式建模方法,通过汽车驾驶模拟器采集驾驶人的驾驶行为操纵数据,利用卡尔曼滤波器对原始数据进行预处理,采用数据/机理相混合的方法对驾驶人的驾驶行为操纵数据进行分析,研究提出基于有向图的个性化驾驶人驾驶行为操纵模式建模方法。以山区高速公路超车行为为例进行建模方法试验,测试结果表明该方法构建的驾驶行为操纵模式能有效地体现出驾驶人驾驶的个体特性,为研究开发个性化和智能化的驾驶安全辅助系统涉及的驾驶行为操纵模式建模问题提供了技术支撑。
驾驶行为;操纵模式建模;卡尔曼滤波;安全辅助系统
0 引言
人、车、路是构成交通环境的三个基本要素,为协调好人、车、路三者之间的关系,以降低交通事故发生概率为目标发展起来的驾驶安全辅助系统(driving safety assistance systems,DSAS)已成为智能车辆领域的重点研究内容之一。目前已有的DSAS一般是基于基准驾驶人来进行辅助控制设计的,这导致DSAS对所有驾驶人采取相同的辅助控制策略和控制参数,无法满足驾驶人的个性化需求。驾驶人的个体因素主要体现在构成其相应驾驶行为的一系列驾驶操纵动作中[1],如果DSAS能够通过采集驾驶人的驾驶行为操纵数据和车辆运行状态信息自动完成对驾驶人驾驶的个体特性的学习并将学习结果体现在DSAS的辅助控制策略中,则可提高DSAS的个性化和智能化水平。实现这一目标的关键技术之一就是研究解决驾驶人的个性化驾驶行为操纵模式建模问题。
目前国内外学者对驾驶人驾驶行为的个体特性已进行了较为深入的研究。李红志等[2]在考虑驾驶人特性的基础上,建立了预瞄时间自适应的最优预瞄驾驶员模型;宗长富等[3]采用BP神经网络构建了驾驶人特性辨识模型;任夏楠等[4]提出了基于驾驶员个体特性的理想转向盘力矩模型;边明远[5]提出了基于修正因子的考虑驾驶员个体特性差异的避撞系统安全车距修正模型;Yamada等[6]在采集历史驾驶行为操纵数据的基础上,利用贝叶斯算法对驾驶人左转弯时能否准确辨识行人横穿马路的概率进行了估算;Bueno等[7]基于前部避撞预警系统研究了驾驶人在预警系统失效后的驾驶特性。上述研究主要针对驾驶人驾驶的个体特性对驾驶行为模型的结构、参数的影响以及特殊场景下驾驶人的驾驶特性进行了探讨,而对于构成其相应驾驶行为的驾驶操纵动作序列及驾驶行为操纵模式的研究则很少。
笔者所在课题组在前期相关课题研究过程中发现,不同驾驶人的驾驶操纵模式会因驾驶人驾驶个体特性的不同而存在一定差异。因此,为研究解决能反映驾驶人驾驶个体特性的驾驶行为操纵模式建模问题,笔者在试验的基础上,提出了基于有向图的个性化驾驶行为操纵模式建模方法,并用试验数据对该建模方法进行了验证。
1 试验数据采集与处理
为使研究提出的个性化驾驶行为操纵模式建模方法更具代表性和典型性,选择道路情况较为复杂、驾驶人驾驶的个体特性展现更为充分的山区高速公路超车行为作为研究分析的对象。
1.1试验数据采集
1.1.1数据采集设备
试验数据利用武汉理工大学交通安全研究型汽车驾驶模拟器采集。具体试验设备如图1所示。

图1 数据采集模拟器
该模拟器由视景系统、控制台系统、通信系统组成。其中视景系统用于提供多种场景和不同天气情况下的视景,视景中车辆运行符合交通流模型,可与驾驶车辆实现互动。试验数据处理单元能以不大于10 ms的时间间隔同步保存驾驶员操纵信息、仿真车辆动力学参数、交通场景相关数据到后台数据库。因此该模拟器能较好地模拟真实的驾驶环境,保证其采集的数据能真实地反映驾驶人驾驶的个体特性,满足试验的要求。
1.1.2采集数据的类型
驾驶人驾驶的个体特性一般体现在构成相应驾驶行为的操纵动作序列中,为深入分析驾驶人驾驶的个体特性与车辆运行状态之间的内在关系,需采集以下驾驶行为操纵数据和车辆运行状态数据:
(1)油门踏板位置PA。该数据反映了驾驶人的加减速意图,数值区间为[0,1]。
(2)前轮转角θw。该数据反映了驾驶人的转向意图、横向操控能力及稳定性,数值区间为 [-36°,36°]。
(3) 车辆中轴线与道路右侧车道中轴线的偏移DZ(简称中-中偏移,道路场景为双向单车道)。该数值单位为m。
(4)车辆行驶速度v。该数据反映了驾驶人的行驶速度,数值区间为[0,140]km/h 。
(5)行驶挡位PG。该数据反映了车辆的行驶挡位,其取值为0,1,2,3,4,5。
(6)离合踏板位置PC。该数据反映了车辆的离合踏板信息,数值区间为[0,1]。
(7)制动踏板位置PB。该数据反映了驾驶人的制动行为,体现了驾驶人的减速意图,数值区间为 [0,1]。
1.1.3超车过程数据的提取
为从原始试验数据序列中准确提取整个超车过程的数据片段,试验过程中需将驾驶人准备超车和结束超车的起止时间节点记录下来,这样便可将整个超车过程的数据片段从原始试验数据序列中提取出来。
1.2试验数据处理
在对试验采集的原始操纵数据进行分析的过程中发现,车速、前轮转角、油门踏板这类操纵数据的变化趋势和变化速率与其具体数值相比,更能反映驾驶人驾驶的个体特性及驾驶人驾驶行为的改变。因此,需求出这类驾驶操纵数据的导数信号,不同的操纵数据类型,其导数的计算方法也有所不同。
1.2.1基于卡尔曼滤波的加速度估计
采集的原始车速数据中存在一定的噪声和毛刺,因此需对其进行滤波处理。此外在数据分析中需求得加速度这一重要信号,简单的车速微分难以获得良好的加速度信号[8]。卡尔曼滤波器是信号估计中的常用方法,并能实现数据滤波功能。为获得更精准的加速度信号,本文基于试验获得的车速信号,利用卡尔曼滤波器对车辆加速度进行估计,具体滤波估计过程如下:
(1)建立车辆纵向运动的系统状态方程:
Xk=AXk-1+Gδk-1k=2,3,…N
(1)
式中,N为离散数据点个数;vk为试验车辆的车速;ak为试验车辆的加速度;δk-1为随机加加速度;A为转移矩阵;G为系统噪声输入矩阵。
根据牛顿运动定律可推出:
其中,T为数据采样周期,T=0.125 s。
(2)建立系统的观测方程:
Zk=HXk+θkk=2,3,…N
(2)
其中,Zk为试验车辆车速的观测值;θk为观测噪声序列;可推出状态变量对测量变量的增益矩阵H=[10]。

(3)
状态估计:
(4)
滤波增益矩阵
(5)
一步预测误差方差矩阵
Pk,k-1=APk-1AT+GSGT
(6)
估计误差方差矩阵
Pk=(I-KkH)Pk,k-1
(7)
式(2)~式(7)为随机线性离散系统卡尔曼滤波基本方程[9]。
图2为滤波估计加速度与车速微分加速度的对比图,从图中可看出经滤波处理后的试验数据更加平滑,滤波估计加速度的波峰与波谷更加明显,有利于操纵动作节点的提取。造成这种差异的原因主要是因为微分求导不能消除信号噪声和毛刺的干扰,而卡尔曼滤波刚好能克服这一缺点。
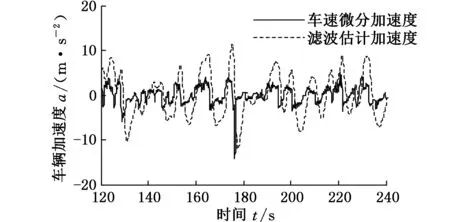
图2 车辆加速度对比图
1.2.2前轮转角及油门踏板数据处理

图3 前轮转角及其导数的时间曲线图

图4 油门踏板位置及其导数的时间曲线图
对前轮转角、油门踏板原始数据进行平滑处理时,采用卡尔曼滤波与平均值方法的差别不大,因此选择计算更为简单的平均值方法对原始数据进行平滑处理,再对其进行微分求导。图3和图4分别为超车过程中前轮转角、油门踏板操纵数据及其导数的时间曲线。从图3和图4中可看出,在前轮转角及油门踏板发生变化时其微分导数显著变大或变小,这种变化体现了驾驶人驾驶的个体特性,表明驾驶人驾驶行为的改变且采取了相应的驾驶操纵动作。因此基于导数来设置相应的操纵动作节点生成阈值,可较好地控制操纵动作节点的生成以用于驾驶行为操纵模式建模。
2 个性化驾驶行为操纵模式建模
2.1驾驶行为操纵模式建模原理
本课题组对同一驾驶行为驾驶操纵数据发生变化的时序进行研究和分析时,发现驾驶人在执行同一驾驶行为时,其操纵动作发生变化的时序具有一定的规律性,而这一系列驾驶操纵动作执行的先后顺序具有有向图的方向性特征。基于这一原理通过采集驾驶人驾驶行为及相应的驾驶操纵数据与车辆运行状态信息,从中提取出能够表示驾驶人驾驶操纵动作发生变化的动作节点,然后根据各节点的表征意义及节点生成时间的先后顺序构建分层式驾驶行为操纵模式,具体如图5所示。
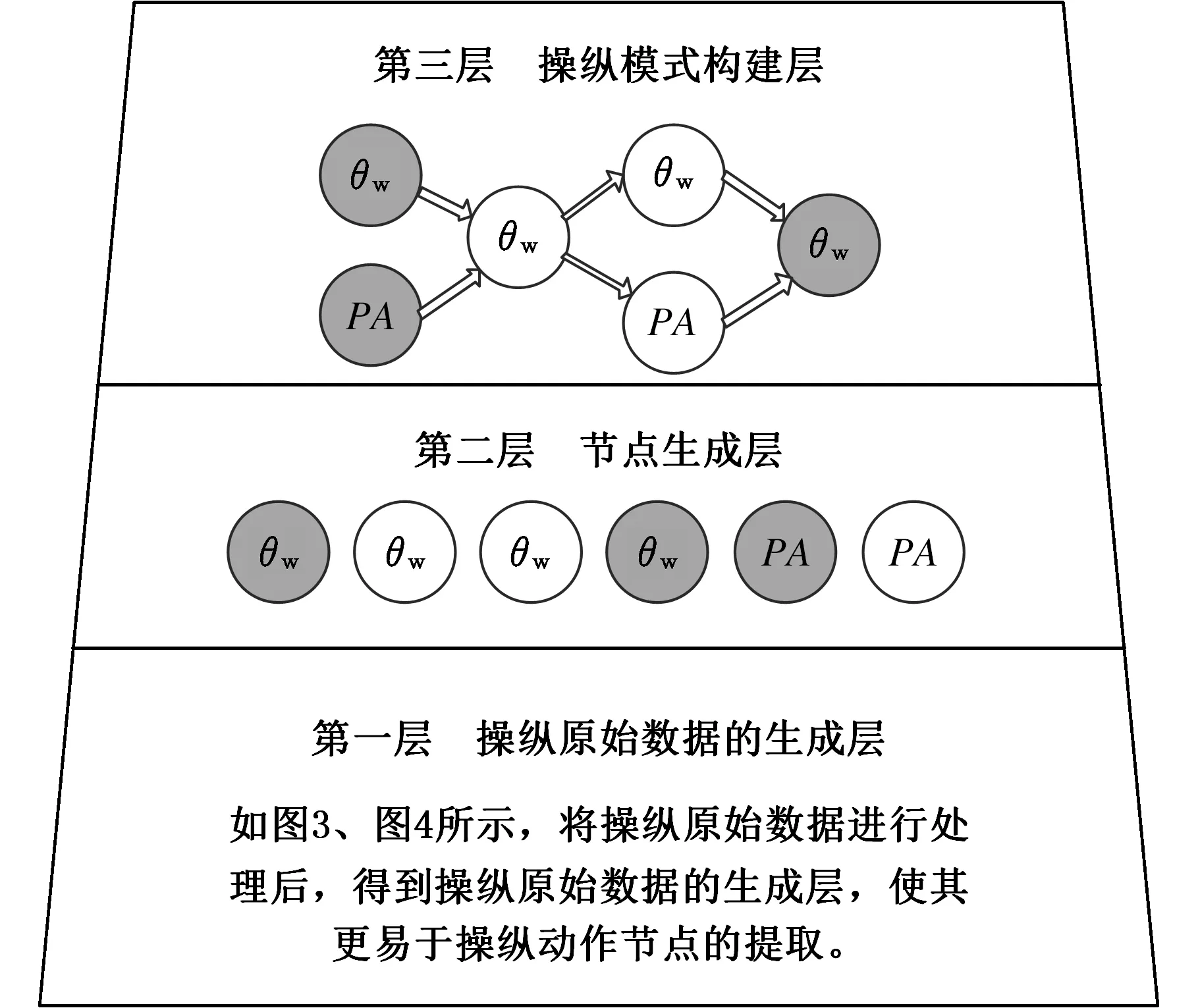
图5 操纵模式构建原理图
2.2驾驶人驾驶的个体特性分析
由前述可知,驾驶人驾驶操纵动作发生变化时,其操纵数据导数会显著地变大或变小,这种变化反映了驾驶人驾驶的个体特性。每个驾驶人操纵动作发生变化的阈值也与驾驶人驾驶的个体特性相关。为分析驾驶操纵动作发生变化的阈值与驾驶人驾驶的个体特性之间的关系,本文选取超车正式开始之前(超车前3 s)和整个超车过程中的操纵数据序列进行研究分析。在车辆行驶过程中,操纵数据的导数有正负值之分,而在确定阈值范围时操纵数据变化的速度和范围更为关键。因此将操纵数据导数取绝对值后,对其进行统计分析并绘出各种操纵数据导数绝对值的平均值和标准差的散点图。本文共选取16组试验数据序列进行分析,具体情况见图6~图8。
从图6a可知,多数情况下超车前车辆加速度绝对值均值的区间为[0,4]m/s2,超车时为[5,8]m/s2,超车时要大于超车前时间段,这表明超车时车辆行驶车速的变化大于超车前时间段。从图6b可知,超车前和超车时车辆加速度绝对值的标准差的变化范围不大,相对比较稳定,这表明驾驶人驾驶的个体特性具有一定的稳定性。
从图7a可知,超车前和超车时的前轮转角导数绝对值的均值都比较小,表明驾驶过程中方向盘的摆动较小,与实际驾驶情况相符合。从图7b可知,超车时前轮转角导数绝对值的标准差大于超车前时间段的相应值,这表明超车时前轮转角处于一个变化的过程中,其变化的范围和速度均大于超车前时间段的相应值。
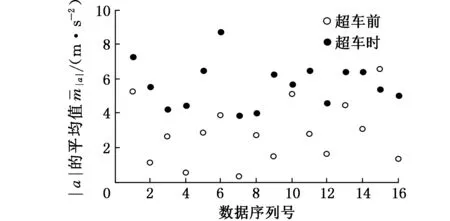
(a)平均值

(b)标准差图6 车辆加速度a绝对值的散点

(a)平均值
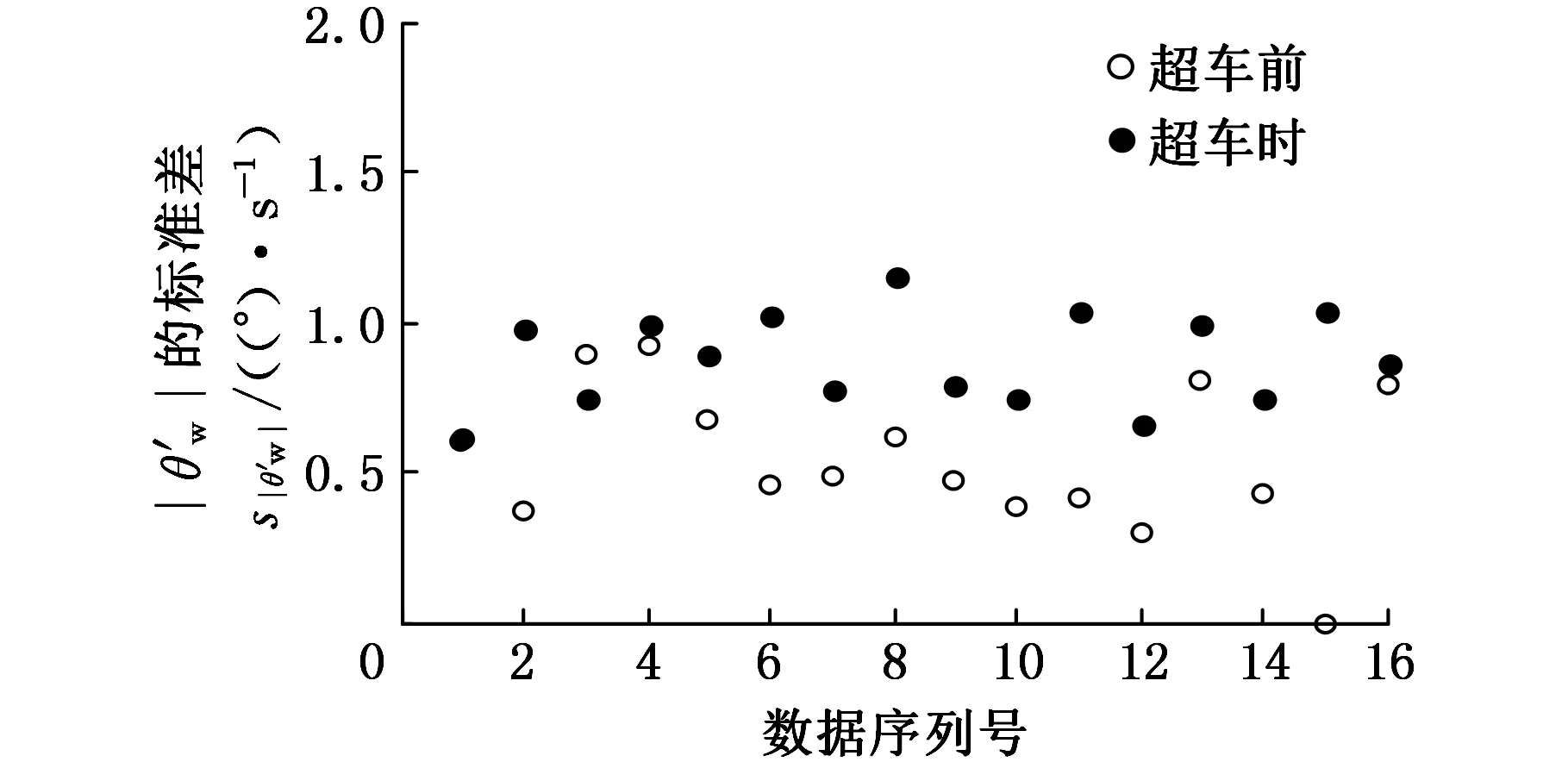
(b)标准差图7 前轮转角导数绝对值的散点图
从图8a可知,多数情况下超车前油门踏板位置导数绝对值的均值为[0,0.2],超车时处于[0.25,0.35],超车时比超车前略大,这表明超车过程的大部分时间中油门踏板位置是处于相对稳定的状态,只在超车超越阶段会有较大的变化。从图8b可知,超车前和超车时的油门踏板位置导数绝对值的标准差的变化范围均不大,这表明驾驶人控制油门踏板位置的个体特性具有一定的稳定性,但超车时的标准差大于超车前时间段的标准差,这表明与超车前时间段相比,超车时油门踏板位置的变化范围更大。

(a)平均值

(b)标准差图8 油门踏板位置导数PA′绝对值的散点图
由以上分析可知,超车过程中驾驶人驾驶的个体特性具有一定的稳定性,超车时操纵数据导数的绝对值大小和变化范围均大于超车前时间段的相应值。另外,超车过程中道路环境、行驶车辆的不确定性因素较多,因此驾驶人操纵动作变化的阈值是一个动态变化的值,这也是驾驶行为操纵模式建模的难点之一。
2.3操纵动作节点的生成与控制
由2.2节分析结果可知,与超车前时间段相比,超车时操纵数据导数的绝对值大小和变化范围均更大,因此可通过设置一个阈值Tu来控制节点的生成 ,当操纵动作数据导数绝对值大于阈值Tu时,则说明此刻操纵动作数据变化的快慢程度已超出正常的稳态行驶,即新的驾驶行为正在产生,表明了驾驶人驾驶意图的改变并且正在执行相应的驾驶操纵动作。由于表示车辆运行状态信息及驾驶人驾驶操纵数据的类型不尽相同,所以各种信号数据阈值Tu的确定方法也有所不同,下面分别给出了不同数据类型阈值Tu的确定方法。
2.3.1连续型操纵动作阈值的确定

(8)
(9)
(10)
当驾驶人驾驶的个体特性和操纵习惯不同时会引起操纵数据和车辆运行状态的不同,因此阈值Tu的值能充分体现驾驶人驾驶的个体特性。当Tn+1时刻的操纵动作数据导数的绝对值|xn+1|>Tu时允许动作节点生成,若|xn+1| 对于车辆中轴线与道路右侧车道中轴线的偏移距离信号(DZ),用平均值对原始数据进行平滑处理并微分求导后,同样采用上述方法控制其操纵动作节点的生成。 2.3.2开关型操纵动作节点的生成 制动踏板、离合踏板这些开关信号若采用上述利用操纵数据的导数来设定阈值Tu的方法,将无法准确地捕捉操纵动作发生变化的动作节点。对于这类信号,笔者采取下述方法来设定阈值Tu:当操纵数据大于0,就可认为操纵动作发生了变化,例如当制动踏板位置信号的数值从0逐渐变大,则表明驾驶人正在执行刹车制动的驾驶行为,以实现减速的驾驶意图。 对于挡位这种开关信号,可分别用dt、dt-1表示t时刻和t-1时刻的操纵动作数据,若dt≠dt-1则可认为操纵动作正发生变化,t-1时刻可认为是操纵动作节点的生成时刻。 利用MATLAB对上述研究的驾驶行为操纵模式建模方法及节点生成算法进行编程,使其能自动控制操纵动作节点的生成,自动形成个性化驾驶行为操纵模式图。为验证建模方法的有效性,下面从山区高速公路超车试验数据中选取一组数据进行测试。 3.1测试数据的样本格式 测试数据是经汽车驾驶模拟器采集,按照驾驶行为操纵模式建模程序的要求整理成Excel表格形式,具体数据格式如表1所示。 表1 测试数据格式示例 3.2超车行为操纵模式层次图 将整理后的驾驶行为操纵数据导入建模程序可得驾驶行为操纵模式层次图,如图9所示。其中,对于PA、θw、DZ和a,深色块分别表示增大、左转、车辆右偏和增大,浅色块分别表示减小、右转、车辆左偏和增大。由图9可知,在整个超车过程中,离合踏板位置、制动踏板位置、行驶挡位这三个操纵数据没有动作节点生成。原始数据中,这三个操纵动作数据也没有发生变化,因此这三种操纵数据的节点生成情况与实际相符合。 图9 超车行为操纵模式层次图 (1)399~400 s,加速度增大,但此时油门并没有增大,因此加速度是从负值增大至0,这表明驾驶人在超车换道之前为控制与前车的安全距离而执行的减速驾驶。 (2)400~402 s,油门增大,加速度增大,前轮左转后回正,紧接着油门有减小趋势,这表明驾驶人正执行超车换道行为,并完成了超车超越阶段。 (3)402~403 s,加速度减小,前轮右转后回正,这表明驾驶人正进行超车并道,并完成了并道阶段。 将超车行为操纵模式层次图与原始操纵数据进行比较可知,上述驾驶行为操纵模式建模方法可准确地将驾驶人驾驶操纵动作的变化节点截取出来,体现了驾驶人驾驶的个体特性。 3.3超车行为操纵模式图 由图9可知各个驾驶操纵动作节点的生成时刻并不一致,但彼此之间的差别较小,有些差别是由干扰因素所致并不是驾驶人驾驶意图的体现。因此对于时间差别较小的节点可进行合并,选取合并时间阈值Td为0.5 s[10],由图9得到合并后的超车行为操纵模式图,如图10所示。 图10 超车行为操纵模式图 由图10知,该驾驶人山区高速公路超车行为的操纵模式序列为:a→(θw,PA)→(DZ,θw)→PA→(a,DZ,θw)。从图10中可看出超车行为中,驾驶人的驾驶操纵动作并不都是按照时间的先后顺序完成的,而是根据驾驶人驾驶的个体特性和车辆运行状态,以串行、并行或混合执行的方式完成的。通过对驾驶人驾驶行为操纵模式的建模并获取驾驶人大量的驾驶行为操纵模式序列后,对其进行分析,则可利用概率统计的方法估算驾驶人在相应驾驶行为中具体会执行哪种操纵动作的概率,进而为DSAS系统对驾驶人的辅助控制策略提供理论依据。 根据驾驶人在执行同一驾驶行为时,其驾驶操纵动作具有一定时序性、内聚性的机理,在利用数据/机理混合的方法对驾驶人驾驶的个体特性进行分析的基础上,提出了基于有向图的个性化驾驶行为操纵模式建模方法。数据测试结果表明,该建模方法准确反映了驾驶人在山区高速公路的超车行为,有效体现了驾驶人驾驶的个体特性。下一步,课题组将用本文提出的个性化驾驶行为操纵模式建模方法对转弯、换道等驾驶行为的操纵模式进行建模,为DSAS能自动完成对驾驶人驾驶个体特性的学习,并采取个性化和智能化的辅助控制策略等关键技术提供解决方法。 [1]SathyanarayanaA,BoyrazP,HansenJHL.DriverBehaviorAnalysisandRouteRecognitionbyHiddenMarkovModels[C]//InternationalConferenceonvehicularElectronicsandSafety.Columbus:IEEE,2008:130-135. [2]李红志,李亮,宋健,等.预瞄时间自适应的最优预瞄驾驶员模型[J].机械工程学报,2010,46 (20):106-111. Li Hongzhi,Li Liang,Song Jian,et al. Optimal Preview Control Driver Model with Adaptive Preview Time[J]. Journal of Mechanical Engineering,2010,46(20):106-111. [3]宗长富,林娜,张泽星,等.线控汽车驾驶员特性辨识算法的研究[J].汽车工程,2014,36(9):1140-1144. Zhong Changfu,Lin Na,Zhang Zexing,et al. A Study on the Identification Algorithm of Driver Characteristics for X-by-wire Vehicles[J].Automotive Engineering,2014,36(9):1140-1144. [4]任夏楠,邓兆祥.驾驶员理想转向盘力矩特性研究[J].中国机械工程,2014,25(16):2261-2265.Ren Xianan,Deng Zhaoxiang.Research on Ideal Steering Wheel Effort Characteristics of Driver[J].China Mechanical Engineering,2014,25(16):2261-2265. [5]边明远.考虑驾驶员个体特性的汽车安全行驶间距模型[J].中国机械工程,2010,21(12):1502-1506. Bian Mingyuan.A Modified Vehicle Safety Distance Model Adapting to Driver Individual Characteristics[J].China Mechanical Engineering,2010,21(12):1502-1506. [6]Yamada K,Mitani T.Estimating Driver Awareness of Crossing Pedestrians While Turning Left Based on Vehicle Behavior Using Bayesian Approach [C]//International Conference on Pattern Recognition.Stockholm,2014:1898-1903. [7]Bueno M,Fabrigoule C,Ndiaye D,et al. Behavioral Adaptation and Effectiveness of a Forward Collision Warn-ing System Depending on a Secondary Cognitive Task[J].IEEE Transportation Research Part F:Traffic Psychology and Behavior,2014,24,158-168. [8]张磊.基于驾驶员特性自学习方法的车辆纵向辅助系统[D].北京:清华大学,2009. [9]付梦印,邓志红,闫莉萍.Kalman滤波理论及其在导航系统中的应用[M].2版.北京:科学出版社,2010. [10]肖献强,任春燕.个性化驾驶人驾驶行为操纵模式建模方法[J].中国科技论文,2014,9(11):1292-1295. Xiao xianqiang,Ren chunyan.Modeling Method of Individual Driver’s Driving Behavior[J].China Science Paper,2014,9(11):1292-1295. (编辑卢湘帆) Driving Behavior Operation Pattern Modeling Method Based on Individual Characteristics Xiao XianqiangYin YanjieWang Jiaen Hefei University of Technology,Hefei,230009 In order to study the method of the driving behavior operation pattern modeling which might reflect the individual characteristics of driver, the driving operation data of drivers using the automobile driving simulator were collected and the raw data was preprocessed by means of Kalman filter. Then, a method of individual driving behavior operation modeling was put forward based on the directed digraphs by analyzing the operation data of drivers with a method of combining the data and mechanism. The method was tested with the data of overtaking behavior on mountain highway. The results show that the driving behavior operation pattern modeled with the method may effectively reflect the individual characteristics of drivers and may provide technical supports to solve the problems of the driving operation pattern modeling for the individual and intellectual driving safety assistance systems. driving behavior; operation pattern modeling;Kalman filter;safety assistance system 2015-11-12 高等学校博士学科点专项科研基金资助项目(20130111120023) U461 10.3969/j.issn.1004-132X.2016.19.021 肖献强,男,1978年生。合肥工业大学机械工程学院副教授。主要研究方向为汽车主动安全、驾驶行为建模与分析。发表论文10余篇。殷延杰,男,1991年生。合肥工业大学机械工程学院硕士研究生。王家恩,男,1984年生。合肥工业大学机械工程学院讲师。3 操纵模式建模方法数据测试



4 结论
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
现代畜牧科技(2021年4期)2021-07-21 06:13:00
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20 07:18:48
流行色(2020年9期)2020-07-16 08:08:54
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
家庭影院技术(2018年9期)2018-11-02 05:31:28
CHIP新电脑(2017年6期)2017-06-19 09:41:44
数学大世界·中旬刊(2017年3期)2017-05-14 17:41:25
黄河之声(2017年13期)2017-01-28 13:30:17