基于广义通用模型控制器的倒立摆串级控制系统设计
2016-10-18 16:07郭丙君
科技视界 2016年22期
郭丙君
【摘 要】在保证倒立摆摆杆不倒的条件下,使小车位置可控,应用串级控制设计方法,首先推导出相应的模型,应用广义通用模型控制器的设计方法对于内环及外环进行设计,将被控对象的模型嵌入到控制器中,应用主导极点的思想对于控制器参数进行选择,仿真结果验证了控制系统具有良好的性能。
【关键词】倒立摆;控制系统
0 前言
倒立摆是一种典型的快速、多变量、非线性、 绝对不稳定系统。人们试图寻找不同的控制方法以实现对倒立摆的控制,以便检验或说明该方法对严重非线性和绝对不稳定系统的控制能力。
目前,已经报道了多种先进的控制方案如最优控制、自适应控制、智能控制等在倒立摆平台上成功应用[1]。但是比较少有报道在保证倒立摆摆杆不倒的条件下,使小车位置可控。
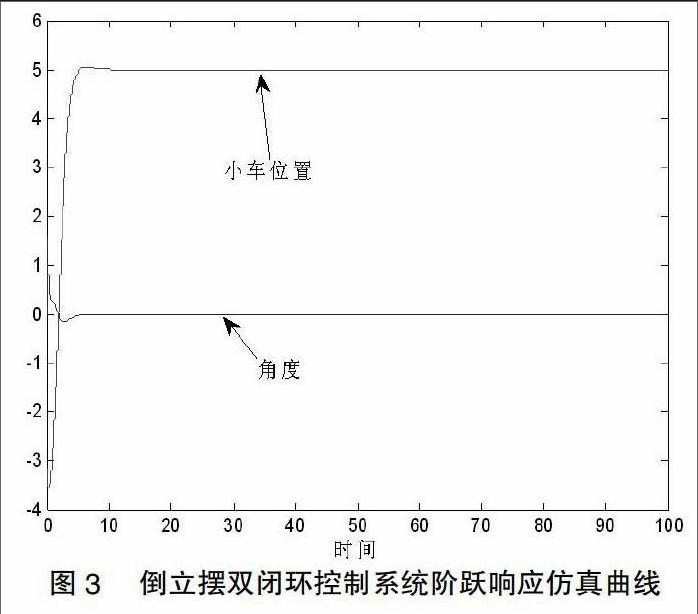
3 仿真实验
根据上节设计的控制器参数及被控对象的模型,在MATLAB/SIMULINK中进行了仿真实验,仿真实验结果如图3所示。图3可以看出系统大约在10s就稳定了,小车位置就稳定在0,控制效果良好。
4 结论
通过应用双闭环控制系统的设计方法对一级倒立摆系统进行控制,在保证倒立摆摆杆不倒的条件下,使小车位置可控的,分别应用广义通用模型控制器对内环和外环控制器进行设计,仿真结果表明该控制方案可以达到良好的控制效果。
【参考文献】
[1]朱文凯,袁桂嫦,朱学峰.倒立摆的 PID 与 LQR 控制算法的对比研究[J].广东自动化与信息工程,2006(2).
[2]固高科技有限公司.倒立摆与自动控制原理实验[M].深圳:固高科技有限公司,2005.
[3]杨平,徐春梅,曾婧婧,蒋式勤,彭道刚.PID控制在倒立摆实时控制系统中的应用[J].计算机信息(测控自动化),2006,22(7-1):83-85.
[4]Bingjun Guo, Jinshou Yu, Generalized Common Model Control[J].Can. J. of Chemical Engineering,2005,6,83(3):599-602.
猜你喜欢
包装工程(2023年16期)2023-08-25
数学物理学报(2022年3期)2022-05-25
环球时报(2020-08-11)2020-08-11
中国中医急症(2019年10期)2019-05-21
机电工程技术(2018年10期)2018-12-06
数学年刊A辑(中文版)(2016年2期)2016-10-30
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01
城市道桥与防洪(2013年9期)2013-03-11
常熟理工学院学报(2010年10期)2010-03-20