
基于动态环境自适应WiFi室内定位系统设计
2016-10-18 01:22张晓娟张佑春
长春工程学院学报(自然科学版) 2016年3期
张晓娟,张佑春
(安徽工商职业学院,合肥230041)
基于动态环境自适应WiFi室内定位系统设计
张晓娟,张佑春
(安徽工商职业学院,合肥230041)
针对室内动态环境中WiFi定位精度低等问题,提出了一种基于位置指纹的自适应定位方案。通过采集参考点处的AP信号强度和终端朝向信息,构建出参考点的位置指纹,再提取待测点位置指纹中的朝向信息,经由KNN算法进行指纹匹配,从而完成预计定位。实验测试表明,方案可有效避免了由于用户手持终端方向及身体遮挡等因素对RSS值的影响。
室内定位;位置指纹;WiFi
0 引言
基于位置的服务(Location Based Service,LBS)是指无线终端设备通过通信网络获取位置信息并为用户提供基于位置信息的个性化服务,如搜索出最近的加油站、医院、停车场等。2010年以后,人们对LBS的需求已经从室外延伸至了室内。虽然GPS或者A-GPS在室外场景下的定位表现让人满意,但是并不太适用于室内环境。首先,信号在室内传播的路径会受家具等障碍物的影响。其次,室内定位对定位精度的要求要高于室外定位。再者,室内环境人员密度高、流动性大,因此,在室内环境下进行定位务必要考虑人体本身的移动对定位的影响[1]。针对室内定位环境的复杂状况,国内外专家提出了许多解决方案,如超宽带技术、蓝牙技术、红外技术、射频识别技术[2]、WiFi无线网络技术、超声波技术[3]等。基于WiFi的室内定位首先通过对移动终端接收到的无线AP发出的信号特性进行转换分析,再根据特殊的定位算法估算出待测的移动终端所在的位置。由于目前越来越多的移动终端,如智能手机等,都集成了WiFi功能,室内环境也布满了AP热点,所以,基于WiFi的室内定位方法得到了快速发展。研究表明,在众多的WiFi室内定位方法中,位置指纹法能以较低的成本获得较高的精度[4],但传统的位置指纹定位方法难以有效地解决在实际使用中终端朝向、用户身体遮挡及动态环境变化等对接收信号强度的影响问题。因此,本文提出一种改进的定位方法,在指纹库创建阶段将终端朝向角度同RSSI值一起采集,构建指纹信息,定位阶段再用KNN算法将待定位点处的指纹信息与数据库中在该朝向角度下的信息进行比对,从而确定位置。实验表明,该方法能有效解决终端朝向和身体遮挡对定位精度的影响问题。
1 室内定位的研究现状
1.1多种室内定位方法比较
文献[4]对几种常见的室内定位技术的定位精度和规模化实现难易程度进行综合比较,其结果如图1所示。
从图1可以看出,超宽带室内定位技术(Ultra Wide Band,UWB)的定位精度最高,几乎能达到到厘米级的精确定位。但是由于该技术需要特殊的移动设备,所以定位成本过高。蓝牙和红外技术都可以获得10 m以内的定位精度,但蓝牙基站和光学设备同样造价不菲,而且红外线易被障碍物阻隔,不利于室内复杂环境下的定位。射频识别技术(RFID)的定位距离较近且不具备通信能力,不利于系统整合,同时,该项技术需要在定位空间布置大量的电子标签,也会增加系统成本。辅助GPS定位(A-GPS)应用在室内环境时定位精度不高,一般在10~20 m之间。综上所述,WiFi定位技术相对于前面几种定位技术来说,无论是从定位精度、定位成本还是可实现性方面考虑都具有很大的优势。
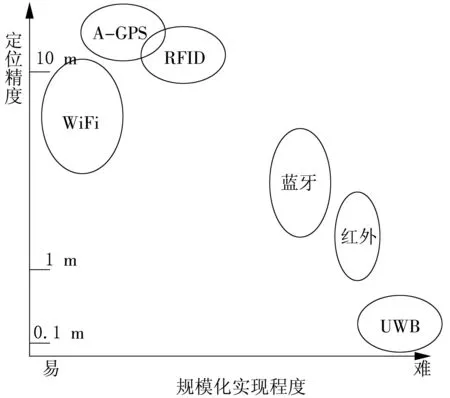
图1 几种室内定位技术综合比较图
1.2基于WiFi的室内定位方法的比较
基于WiFi的室内定位技术通常有TOA,TDOA以及RSSI等。TOA是基于信号到达时间的定位方法(Time of Arrival),而TDOA是TOA的改进方法,但是不管是TDOA还是TOA,都需要在定位终端配置时间测量模块,所以这两种定位方法的硬件成本较高[5]。RSSI即为基于接收信号强度的定位方法(Received Signal Strength Indication),又可细分为传输损耗法和位置指纹法[6]。位置指纹法用于进行定位的过程,类似于人类指纹匹配原理。当对某人进行指纹匹配时,通常是将采集到的某人的指纹与指纹数据库中存储的指纹样本进行对比,找出数据库中最匹配的指纹样本,进而确定某人的身份信息。该方法分为两个阶段:一是离线阶段,该阶段主要用于建立指纹数据库,需要在待定位区域设置参考点,并采集各个参考点的接收信号强度(RSS)等信号特征值,构建位置指纹样本。二是在线定位阶段,该阶段通过把待定位终端处采集到的位置指纹信息与指纹数据库中的RSSI指纹样本进行逐一对比,并通过特定的算法来估计出定位终端的位置。该方法不需要建立信道传播模型,也不需要额外的硬件设备来测量信号入射角度,因此,节省了大量的硬件开发成本。本文所设计的定位系统也是采用的这种方法。
2 本系统算法原理及方案
2.1总体设计方案和思路
由前面的分析可知,基于位置指纹的WiFi室内定位方法,其定位精度很大程度上取决于位置指纹数据库的精确度。考虑到动态环境特点及对RSS值的影响,首先采集参考点处的AP信号强度,其次采集使用者手持终端的朝向信息,再次构建出参考点的位置指纹,待提取出待测点位置指纹中的朝向信息后,经由KNN算法进行指纹匹配,最终确定出估计位置。
2.2离线阶段数据库创建
离线阶段主要实现指纹数据库的创建,主要分为下面几个步骤。
第一步:将待定位实验区域划分成几个面积大致相同的方格,把方格的交点处设置成定位参考点。对每个参考点进行编号,并粘贴上对应的二维码,该二维码包含该参考点的坐标信息,用P(x,y,z)表示。如果系统中设定有i个参考点,则第i个参考点处的坐标可以表示为:Pi=(xi,yi,zi),其中i为参考点的编号。
第二步:在每一个参考点处,让实验人员手持智能手机原地旋转一周(360°),并扫描该点处的二维码,将该参考点处的位置信息P及位置指纹信息S采集并上传至服务器。在一个参考点处一次采样到的位置指纹信息S应包含SSID(基本服务标志)、RSSI(接收信号强度)、终端朝向角度,用向量表示为S=(Β,R,Α),其中Β={β1,β2,…βn},R={γ1,γ2,…γn},Β为SSID,R为RSSI,Α为采样时终端的朝向角度,n为AP的数目。
1)综合考虑到定位的精确度和软件开销,本系统将360°分成几个等大小的角度区间,然后对每个角度区间进行编号,在一个采样周期内对每个角度区间内的信号强度和SSID进行多次采样,RSSI取多次采样的平均值。采样次数记录为N,通常设定为奇数。如此可得到在某个参考点处,一次采样得到的数据可表示为
Si=(S(1),S(2),S(3),…,S(j)),
(1)
式中j即为一次采样得到的数据个数,计算公式为:

(2)
式中:∂为每个角度区间的大小;T为采样周期。
2)用在此参考点处得到的Si和Pi构造该参考点的完整位置指纹信息PSi
PSi=(Pi,Si),
(3)
式中PSi为第i个参考点处的位置指纹信息。
其余参考点处的位置指纹信息都可以通过上述方法逐一获得。当i个参考点的指纹数据信息都构建完毕,则指纹数据库也就组建完成。
图2为本系统所采用的方法采样信号的柱状图,图3是采用传统的指纹信息采集方法,图4是采用传统的指纹信息采集方法和本系统所采用的方法的对比。因此,在180°左右(用户手持终端背向AP时)信号强度最弱,也说明身体遮挡也会影响定位精度。与传统采样方法(信号平均值)相比,文章所采用的方法不但能够采集到信号的大小,还能反映出信号特征。

图2 本文系统采样信号柱状图

图4 两种方法对比图
2.3在线定位阶段的定位算法
由于在离线数据库创建阶段,我们在指纹信息中增加了终端朝向A这个向量,使计算的复杂度大大增加,所以,为了减轻服务器的计算工作量,本系统在线采样阶段采用的模式匹配算法为比较简单的KNN算法(K近邻算法)[7],该算法原理如下:设在某时刻某一位置采集到的位置指纹向量为S,首先求出S与指纹数据库中各个参考点对应的位置指纹Si的欧式距离,将该距离进行升序排列后,再选取K个具有最小欧式距离的参考点对应的位置信息Pi进行加权,加权后的位置信息即为终端的估计位置。该算法用公式表示为:
(4)


(5)
3 总体系统组成及工作流程
系统采用通用结构,主要由客户端、服务器系统、通信网络等3大模块组成,具体框架如图5所示。
其中,客户端主要实现用户的数据采集和用户定位位置的实时显示。通信网络由无线AP、通信路由器及WiFi网络组成,是实现客户端与服务器系统进行数据交换与信息传输的重要环节。服务器系统是整个室内定位系统的核心,由数据采集处理服务器、数据库服务器和应用服务器组成。整个定位系统的定位过程可分为3个阶段:离线阶段、在线定位阶段和数据库维护阶段。离线阶段主要实现指纹数据库的创建。在线定位阶段,待定位终端通过预先安装的定位软件向服务器发出定位请求,也即是将采集到的不同AP的RSSI值以及终端朝向等信息发送给服务器,服务器接收到该信息后首先进行数据的预处理,然后再查询指纹数据库,按照一定的算法将该采样数据与数据库中所有该方向的指纹样本进行匹配,估计出当前终端所在的位置坐标。最后再把该位置坐标及相关地图信息发送给定位终端,由定位终端调用地图显示模块在屏幕上直观显示出来。在数据库维护阶段,当室内家具的布置以及人流量变化的时候,各个参考点处的RSSI值也会有很大变化。当用户在使用定位系统的过程中,如果发现定位偏差很大,此时允许用户通过手机客户端进行数据库的更新和维护。
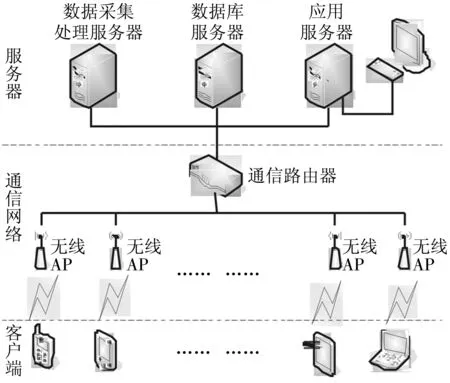
图5 室内定位系统组成框架图
4 结语
本文设计的基于WiFi的室内定位系统,是在传统位置指纹定位算法的基础上,增加了对终端朝向角度信息的采集,将采样到的指纹信息同该朝向下的所有指纹样本进行比对,从而确定预计位置。从实验数据来看,有比较满意的定位效果。由于本方法目前只在实验室阶段进行,采样时只采取了一些特殊角度时的数据,定位精度还不是很高。因此,后续研究拟对朝向角度采样时采取连续采集,在定位阶段采用KNN-SVM或人工智能等更为精确的定位算法,以进一步提高定位精度。
[1] 陈斌涛,刘任任,陈益强,等.动态环境中的WiFi指纹自适应室内定位算法[J].传感技术学报,2015,28(5):729-738.
[2] 李丽娜,马俊,徐攀峰,等.RFID室内定位技术综述[J].计算机应用与软件,2015,32(9):1-3.
[3] 韩霜,罗海勇,陈颖,等.基于TDOA的超声波室内定位系统的设计与实现[J].传感技术学报,2010,23(3):347-353.
[4] 罗家宥.基于位置指纹的WiFi室内定位技术与实现[D].上海:上海交通大学,2014.
[5] 秦泗明.基于位置指纹的WiFi室内定位技术研究[D].西安:电子科技大学,2013.
[6] 丁根明.基于人工智能的室内指纹定位技术研究[D].北京:北京交通大学,2015.
[7] 周锦,李炜,金亮,等.基于KNN-SVM算法的室内定位系统设计[J].华中科技大学学报:自科版,2015,43(增1):517-519.
The Design of WiFi Indoor Location System Based on Self-adaptive in Dynamic Environment
ZHANG Xiao-juan,etc.
(AnhuiBusinessVocationalCollege,Hefei230041,China)
Aiming at the problems such as low positioning accuracy of WiFi in indoor dynamic environment,a self-adaptive location scheme based on the location fingerprint is proposed in this paper.By collecting signal strength of AP and terminal orientation information on reference spot,the location fingerprint of the reference spot has been built.Then the orientation information is extracted from the measured spot fingerprints.Fingerprint matching has been made via the KNN algorithm to complete the positioning expectation.Experimental results show that the scheme can effectively avoid the influence to RSS value by the user’s hand held terminal direction and the body block,and has certain application value.
indoor location;location fingerprint;WiFi
10.3969/j.issn.1009-8984.2016.03.022
2016-06-15
安徽省高等学校自然科学研究项目(KJ2016B004)
张晓娟(1982-),女(汉),江西新余,讲师,硕士
主要研究楼宇智能化技术。
TP391
A
1009-8984(2016)03-0097-04
安徽省高等学校自然科学研究项目(KJ2016A082)安徽省高校优秀青年人才支持计划重点项目(gxyqZD2016438)
猜你喜欢
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
金属加工(冷加工)(2020年11期)2020-11-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年5期)2018-12-09
读者·校园版(2018年24期)2018-12-04
测控技术(2018年4期)2018-11-25
精密制造与自动化(2018年1期)2018-04-12
雷达学报(2017年1期)2017-05-17
