
一种回转工作台的设计
2016-10-18 03:16:32孙贝贝
电子工业专用设备 2016年9期
孙贝贝
(太原风华信息装备股份有限公司,山西太原030024)
一种回转工作台的设计
孙贝贝
(太原风华信息装备股份有限公司,山西太原030024)
回转工作台在现代工业设备中使用场合多应用范围广,针对某些场合对回转工作台回转精度、承载刚性、回转速度等使用方面的要求,设计了一种伺服电机+谐波减速机+交叉滚子轴承的回转工作台机构。对回转工作台机构中,使用的伺服电机、谐波减速机和交叉滚子轴承的选择匹配,进行了详细的计算说明,对现代工业设备中类似的回转机构有积极的借鉴和指导作用。
回转工作台;谐波减速机;交叉滚子轴承
回转工作台在现代工业设备中十分常见,也是应用场合比较多范围比较广的一种机械结构。不同的使用条件和场合也要求有相对应的不同机械结构。在给定使用条件和场合的前提下,选择一种合理的回转机械结构,对于设备的使用效率、寿命、成本至关重要。常见的回转机构有DD电动机驱动的回转工作台,旋转气缸驱动回转工作台,伺服电机+减速机驱动的回转工作台,以及由UVW平台实现的小范围回转工作台等。
本文所设计的回转工作台由伺服电机+谐波减速机+交叉滚子轴承组成,属于伺服电机+减速机驱动工作台的一种。由伺服电机通过谐波减速机驱动相关的机械连接件带动工作台在交叉滚子轴承上实现低速高刚性的回转运动并且能保证使用条件要求的回转精度。
1 回转工作台设计要求
此回转工作台机构的使用要求:
(1)工作台尺寸1 000 mm×800 mm×50 mm,材质2A12,水平安装。
(2)在0°~360°角度范围内做90°的转动,每1 s转90°后停顿2 s,旋转速度可精确控制,且最大转速135°/s。
(3)在回转工作台面的工作范围内,由回转角度的精度误差所造成的x轴和y轴方向的误差≤0.1 mm。
(4)回转工作台的工作台面在旋转运动停止时,能够承载质量为120 kg,速度为500 mm/s物体所造成的垂直工作台面的冲击力,冲击作用时间0.01 s。
2 确定总体结构
回转工作台机构如图1所示。是由安装基板、电机支架、伺服电机、谐波减速机、联轴器、连接轴1、连接轴2、交叉滚柱轴承、轴承安装板、平台连接板、传感器、轴承安装板等零部件组成。安装基板固定,电机支架和轴承安装板固定在安装基板上,电机固定在电机支架上。

图1 总体结构示意图
工作原理:电机通过谐波减速机驱动连接轴2,联轴器将连接轴2的动力传动至连接轴1。连接轴1和平台连接板连接,连接轴1转动会驱动平台连接板转动。平台连接板同时将工作台和交叉滚柱轴承连接,平台连接板转动会带动工作台在交叉滚柱轴承上转动。
3 交叉滚柱轴承的选择
回转工作台受力示意图如图2所示:回转工作台在回转运动停止时所承受的冲击力会在工作台尺寸范围内任意移动。
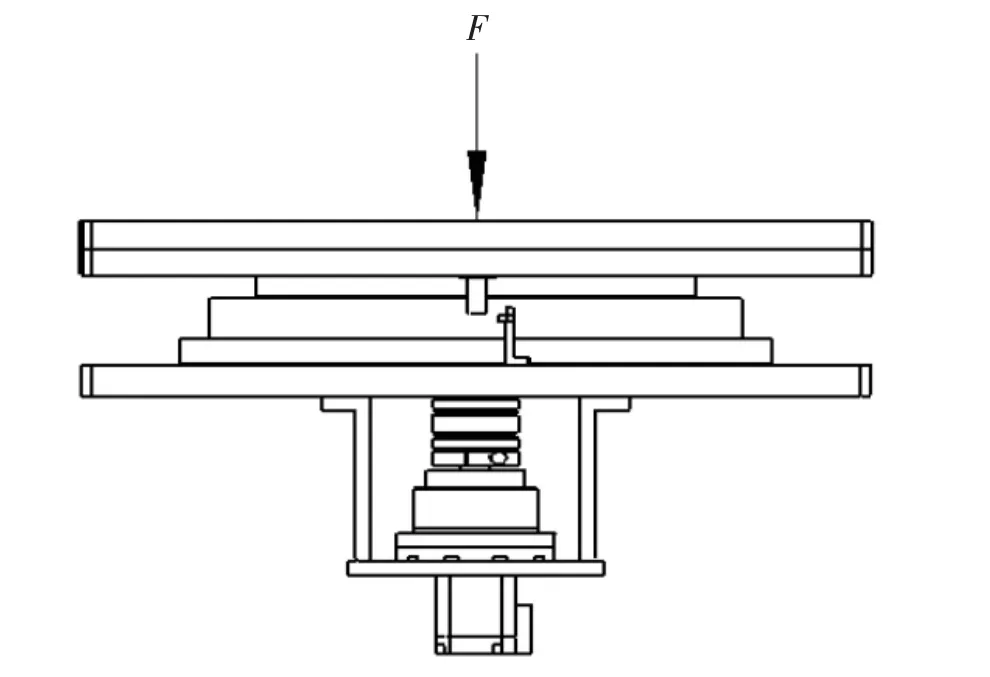
图2 回转工作台受力示意图
3.1交叉滚柱轴承的初步选择
根据使用条件,我们选用的交叉滚柱轴承是THK的RU系列。RU系列是内外圈一体化构造并有安装孔,所以不需要法兰和支撑座,安装简易。另外安装对性能几乎没有影响,因此能获得稳定的旋转精度和扭矩。
由回转工作台的设计要求所提供的外形尺寸、材质,通过质量密度公式计算得到工作台质量为108 kg,平台连接板质量为12 kg,连接轴1质量是8 kg,可知交叉滚子轴承的静止负载为128 kg。
根据使用条件4由动量定理:

(W为交叉滚子轴承所承受冲击载荷的质量)
将冲击物体质量W=120 kg,时间0.01 s、速度500 mm/s代入公式(1)得轴向冲击载荷力:
由工作台面的尺寸计算冲击力的最大力臂长度为:

轴承所承受的最大力矩

将公式(1)和(2)所得冲击力和最大力臂长度代入公式(3)得:

通过以上计算可得交叉滚子轴承的轴向载荷:

将冲击载荷F和交叉滚子轴承的静止负载128 kg代入公式(4)得:
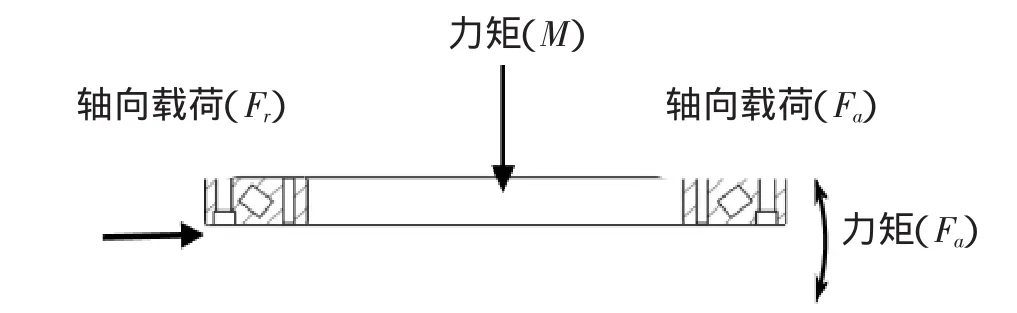
图3 交叉滚子轴承受力示意图
将M=4.608 kNFa=8.48 kN代入公式(5)
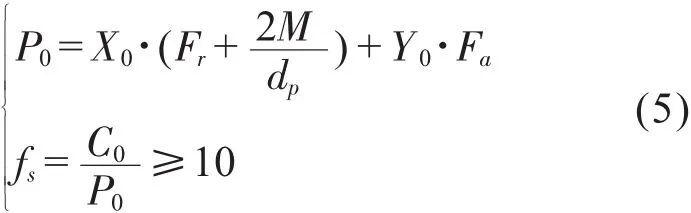
fs为静态安全系数
考虑到使用寿命等的动态性能,一般建议确保7以上,此处我们取10。
C0为基本额定静载荷
P0为静态等价径向载荷
Fr为径向载荷
Fa为轴向载荷
M为力矩
X0为静态径向系数
Y0为静态轴向系数(Y0=0.44)
dp为滚柱的节圆直径
得(C0-37.312)×dp≥92.16 kN·m,由THK样本A18-20页提供的C0和dp参数选择RU445交叉滚子轴承满足基本要求。
3.2交叉滚柱轴承型号确认
3.2.1交叉滚柱轴承使用寿命校核
通过查阅THK样本可知RU445交叉滚子轴承基本参数:
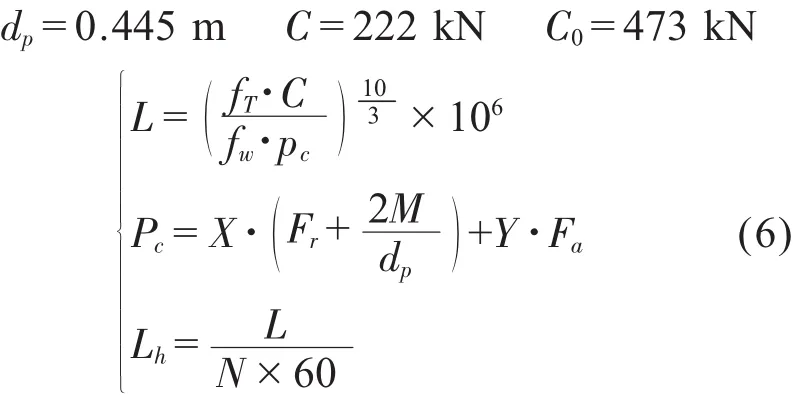
L为额定寿命
C为基本额定动载荷
fT为温度系数,低于80℃系数取值取1
fw为负荷系数,剧烈震动冲击是值1.5~3
Pc为动态等价径向载荷
Lh为工作寿命时间
N为每分钟转速
X为动态径向系数参照THK样本B18-9表2
Y为动态轴向系数参照THK样本B18-9表2
查THK样本B18-9表2得动态径向系数与动态轴向系数公式为:

Fa=8.48 kNM=4.608 kNdp=0.445 m代入公式 (7)得到的数值约为0.41≤1.5为查THK样本B18-9表2得出X=1,Y=0.45。
将X=1,Y=0.45,Fr=0,M=4.608 kN,dp=0.445 m,Fa=8.48 kN代入公式(8)
得出Pc≈24.526 kN
由设计要求第2条,可得工作台旋转一圈的时间约为12 s,由此值可得平均转速为:N=5 r/min。将Pc≈24.526 kN,C=222 kN,fT=1,N=5 r/min,fw=3代入公式(9)
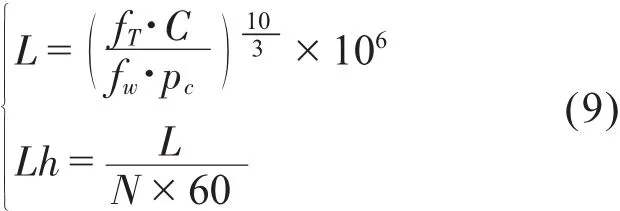
Lh≈1.323×105h,约满足15年使用寿命。
3.2.2交叉滚柱轴承静态安全系数校核
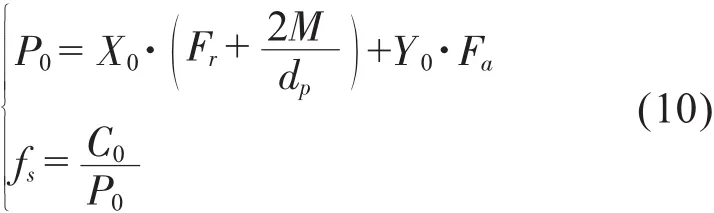
将X0=1,Y0=0.44,M=4.608 kN,Fr=0,dp= 0.445 m,Fa=8.48 kN,C0=473 kN代入公式(10)得fs≈19.3满足使用要求。
3.2.3交叉滚柱轴承静态容许力矩校核
交叉滚柱轴承静态容许力矩计算公式:

将C0=473 kN,dp=0.445 m,代入公式(11)得M0≈105 kN·m,满足使用要求。
3.2.4交叉滚柱轴承静态容轴向载荷校核
交叉滚柱轴承静态容轴向载荷计算公式:

将C0=473 kN,Y0=0.44代入公式 (12)得出Fao=1075 kN,满足使用要求。
4 电机的选择
4.1电机初步选择
工作台为长方体,且旋转中心在其中心。
将工作台尺寸代入长方体惯量公式(13):

得J1=14.76 kg·m2
平台连接板、连接轴1、连接轴2为圆柱体,分别将其尺寸质量代入公式(14)(15)(16):

得J2=3.12 kg·m2,J3=1.15 kg·m2
J4=0.97 kg·m2
负载总惯量J=J1+J2+J3+J4=20 kg·m2
负载的惯性力矩:

将J和α代入公式(17)得

回转工作台在旋转过程中会有摩擦转矩Mf,一般滚柱轴承的摩擦系数μ为0.01~0.012之间。此处,考虑到安装使用和润滑等条件我们取μ=0.04

将m=128 kg,μ=0.04,dp=0.445 m代入公式(18)得

负载转动所需要的最大机械功率:
将MaMf代入公式(19)得Pmax≈360 W
负载匀速转动所需要的机械功率:

将Mf代入公式(20)得P0≈27 W电机的功率:

(η为电机传动效率,此处取值0.9,)得出215 W≤P≤430 W,由此确定电机的型号为400 W安川电机SGMJV-04ADA61,参数为:
额定转矩:1.27 N·m;
峰值转矩:4.46 N·m;
额定转速:3000 r/min;
最高转速:6000 r/min;
电机惯量:0.442 kg·cm2;
电机重量:1.5 kg;
4.2预选电机确认
电机最大加速转矩确认:
将Ma=141.3 N·m,Mf=11.4 Nm,i=180,η= 0.9代入电机加速转矩公式(22)(23)


小于电机峰值转矩。
电机最大减速转矩确认:

小于电机峰值转矩。
负载的转矩有效值确认:
由设计要求2可知,工作台要在1 s内旋转90°,电机的工作过程是:电机启动加速,加速到最大速度后匀速,然后由最大速度减速停止,过程如图5转速曲线所示。
由设计要求2计算转矩、角加速度公式:

由β是最大加速度,可知t1=t3,将最大转速135°/s,t1=t3,t1+t2+t3=1 s代入公式(24)
可得t1=t2=t3=1/3 s,β=405°/s2。
由转矩有效值公式如下:
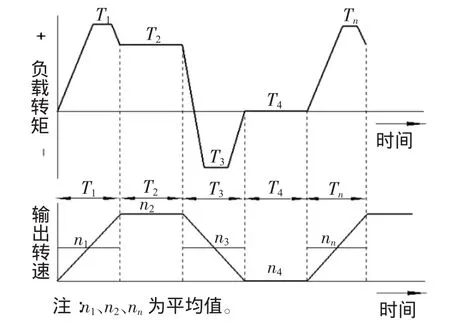
图4 负载转矩转速时间图

5 谐波减速机的选择
5.1谐波减速机的初步选择
根据负载转矩模式计算出减速机输出侧施加的平均负载。

na加速阶段的平均转速。
nb匀速阶段的平均转速。
nc减速阶段的平均转速。
Ta加速阶段的平均转矩。
Tb匀速阶段的平均转矩。
Tc减速阶段的平均转矩。
由最大转速135°/s可知最大输出转速nb=nmax=22.5 r/min。
η=0.9(η为传动效率,此处取0.9),

Tav≈126 N·m<281 N·m
(281 Nm为型号CSG-32-120平均负载的转矩最容许大值)
型号CSG-32-120减速机的参数:
额定转矩:178 N·m
峰值转矩:459 N·m
平均输入转速:3500 r/min
最高输入转速:4800 r/min
减速机惯量:0.442 kg·cm2
减速箱额定寿命:L10=10000 h
减速箱典型位置精度:30arc sec
减速箱重复定位精度:1.5 kg
5.2预选谐波减速机的确认
减速机精度的确认:
由减速机参数的典型位置精度计算可得减速机的角度误差为0.00834°,根据转台尺寸计算角度误差造成的误差弧长为0.094 mm小于设计要求的误差精度。
由设计要求第2条,可得工作台旋转一圈的时间约为12 s,由此值可得负载平均转速为N= 5 r/min,减速机的平均转速
n0av=N×i=600 r/min≤3500 r/min
(3 500 r/min是选定减速机容许平均输入转速)
根据负载的最高输出转速计算出减速机的最高输入转速nimax=22.5×120=2700 r/min≤4800 r/min
(4 800 r/min减速机容许最高输入转速)
由负载的惯性力矩和摩擦力力矩可知减速机的最大启动转矩:

最大停止时的转矩:

(459 N·m是选定减速机启动停止时的容许峰值转矩)
实际使用寿命:

Ln为L10或则L50时的使用寿命时间
Tr为额定转矩
Nr为额定转速
Tav为输出侧的平均负载转矩
Nav为平均输入转速
将Ln=1.0×105h,Tr=178 N·m,Nr=2000 r/min,Tav=126 N·m,Nav=600 r/min代入公式 (27)Lh= 7.6×104h约为8.5年,满足使用要求。
5.3电机和谐波减速机的匹配
校核额定转矩:
1.27×120=152.4 N·m≤178 N·m
校核峰值转矩:
4.6×120=535.2 N·m>459 N·m
电机的峰值转矩经减速机后略大于减速机的峰值扭矩,这就需要在伺服电机驱动器中限定最大允许加速度,降低峰值扭矩的输出,使其最大输出转矩小于减速机的峰值转矩。
6 结束语
由伺服电机+谐波减速机+交叉滚子轴承组成的回转工作台,具有回转精度高、机械刚性好、稳定性好、安装使用方便等优点。其整个机械机构设计和伺服电机、谐波减速机、交叉滚子轴承的选型匹配,对于回转工作台的设计具有广泛的借鉴意义。
[1] 成大先.机械设计手册[M].北京:化学工业出版社,2004
[2] Harmonic Drive组合型产品目录2011年4月.No. 1110-01-HDUNT
[3] 安川5选型手册2009年5月版
[4] 直线运动系统(THK样本)中文版.No.508C
The Design of a Kind of Rotary Table
SUN Beibei
(Taiyuan Fenghua Information-Equipment,Taiyuan 030024,China)
The rotary table is widely used in the modern industrial equipment.Due to the rotation accuracy,bearing rigidity,turning speed etc use requirements of the rotary table.A servo motor+ harmonic reducer+cross roller bearing of rotary table has been designed.Rotary table institutions,Servo motor,harmonic reducer and cross roller bearing have been choice matched and carried on the detailed instructions.Similar slewing mechanism has a positive reference and guidance to the modern industrial equipment.
Rotary table;Harmonic reducer;Cross roller bearing
TN605
B
1004-4507(2016)09-0043-06
孙贝贝(1980-),男,山东兖州人,工学学士,工程师,主要从事电子专用设备的研发工作。
2016-08-25
猜你喜欢
山东冶金(2022年1期)2022-04-19 13:40:50
哈尔滨轴承(2021年1期)2021-07-21 05:43:10
哈尔滨轴承(2021年4期)2021-03-08 01:00:52
制造技术与机床(2019年7期)2019-07-22 03:43:08
制造技术与机床(2019年7期)2019-07-22 03:42:28
轴承(2018年10期)2018-07-25 07:22:22
制造技术与机床(2017年8期)2017-11-27 02:10:01
山东工业技术(2016年15期)2016-12-01 05:31:50
设备管理与维修(2016年7期)2016-04-09 03:17:19
邢台学院学报(2016年4期)2016-02-28 19:54:41
