
An iterative re-weighted least-squares algorithm for the design of active absorbing wavemaker controller*
2016-10-14 12:23:17HongqiYANG杨洪齐MuguoLI李木国ShuxueLIU柳淑学FangmeiCHEN陈芳梅
水动力学研究与进展 B辑 2016年2期
Hong-qi YANG (杨洪齐),Mu-guo LI (李木国),Shu-xue LIU (柳淑学),Fang-mei CHEN (陈芳梅)
1.State Key Laboratory of Coastal and Offshore Engineering,Dalian University of Technology,Dalian 116024,China,E-mail:hongqi98@163.com
2.The Department of Electronic Engineering,Tsinghua University,Beijing 100084,China
An iterative re-weighted least-squares algorithm for the design of active absorbing wavemaker controller*
Hong-qi YANG (杨洪齐)1,Mu-guo LI (李木国)1,Shu-xue LIU (柳淑学)1,Fang-mei CHEN (陈芳梅)2
1.State Key Laboratory of Coastal and Offshore Engineering,Dalian University of Technology,Dalian 116024,China,E-mail:hongqi98@163.com
2.The Department of Electronic Engineering,Tsinghua University,Beijing 100084,China
In physical model tests for highly reflective structures,one often encounters a problem of multiple reflections between the reflective structures and the wavemaker.Absorbing wavemakers can cancel the re-reflective waves by adjusting the paddle motion.In this paper,we propose a method to design the controller of the 2-D absorbing wavemaker system in the wave flume.Based on the first-order wavemaker theory,a frequency domain absorption transfer function is derived.Its time realization can be obtained by designing an infinite impulse response (IIR) digital filter,which is expected to approximate the absorption transfer function in the least squares sense.A commonly used approach to determine the parameters of the IIR filter is applying the Taylor expansion to linearize the filter formulation and solving the linear least-squares problem.However,the result is not optimal because the linearization changes the original objective function.To improve the approximation performance,we propose an iterative reweighted least-squares(IRLS) algorithm and demonstrate that with the filters designed by this algorithm,the approximation errors can be reduced.Physical experiments are carried out with the designed controller.The results show that the system performs well for both regular and irregular waves.
wave maker,active absorption,infinite impulse response (IIR) digital filters,optimization methods
Introduction
Wave flume facilities are often used to test the design,the safety and the feasibility of structures in the coastal engineering field.A central part of such facilities is the wave maker,which is used to generate waves.When the test structures are highly reflective,such as the breakwater,the re-reflected waves might often pose a problem,which will spoil the test domain.To solve this problem,active absorbing wave makers were developed,to generate waves and absorb refle-cted waves at the same time.
An absorbing wavemaker was first built by Milgram[1].Two flap-type paddles are placed on two ends of a wave flume.One is used to generate target waves,and another is used to absorb the impinging waves and prevent reflections.A wave gauge near the paddle is installed to measure the surface elevation,which serves as the feedback signal.A recursive filter is designed to transform the feedback signal to the control signal.Christensen and Frigaard[2]developed an absorbing wavemaker with two wave gauges placed some distance from the wavemaker.Two FIR digital filters are used to estimate the paddle motion.Liu et al.[3,4]placed wave gauges on the front of the paddle and implemented the irregular wave absorption by using multi-representative frequencies over the target frequency range.Schäffer and Jakobsen[5]developed a method for the non-linear wave generation and absorption.They decomposed the paddle motion into a generation part and an absorption part,to generate waves by the linear or non-linear wave theory,and absorb re-flected waves by the linear theory.
As mentioned by Schäffer and Klopman[6],in the design of an active absorbing wave maker system,several fields are involved:mechanics,hydrodynamics,signal processing,and control theory.Most previous studies focused on the feedback signal acquisition and the hydrodynamics.However,few studies discussed the controller design algorithms.Based on the hydrodynamics,an absorption transfer function in the frequency domain can be derived.The control algorithm for the paddle motion can be obtained by approximating the absorption transfer function with a digital filter.Christensen and Frigaard[2]designed two FIR digital filters by a trial and error approach with the least-squares criterion.Although with this approach,the filter parameters can finally determined,it is hard to readjust the frequency response,especially when one has to change the sample frequency for different wave maker systems.Schäffer and Jakobsen[5]proposed to fit the frequency response of an IIR digital filter to the absorption transfer function,but they did not report the fitting algorithm and the fitting performance.Although some active absorbing wavemakers were built in recent years,such as Spinneken and Swan[7,8],De Mello et al.[9]and Higuera et al.[10],a complete and practical controller design algorithm is not seen in literature.
In this paper,based on the linear wavemaker theory[11],the absorption transfer function of a piston-type wavemaker system is derived.The properties of the transfer function are discussed.When the magnitude of the transfer function is large at zero frequency,one has to deal with the paddle drifting problem.Therefore,a modification of the transfer function is made to avoid this problem to occur.Compared with the FIR filters,the IIR filters can cope with the frequency response of the transfer function of a lower order,thereby reducing the computational cost.Hence,we use an IIR filter to approximate the modified transfer function,which is a nonlinear optimization problem[12].A common method to solve this problem is to apply the Taylor expansion to linearize the filter formulation and solve the linear least-squares problem[13].However,the solution obtained by minimizing the linear problem is no longer a true least-squares design.To solve this problem,we propose an iterative reweighted least-squares (IRLS) algorithm to improve the fitting performance.In each iteration,a weighted least-squares problem is solved by the standard Gauss-Newton method,and the reweighting scheme can be considered as a feedback control,because the weighting function is based on the output of the true objective function.Experimental results show that the filter designed by the IRLS algorithm is better than that designed by the direct least-squares method.

Fig.1 Sketch of a piston-type active absorbing wavemaker in a wave flume
1.Absorbing wavemaker theory
1.1 Basic piston-type wavemaker theory
The definition sketch of a piston-type active absorbing wavemaker in a flume is shown in Fig.1.The wave gauge is fixed on the wave paddle.Let the complex paddle position be defined as

where Xais the constant amplitude of the paddle motion,σis the angular frequency of the paddle motion,andi is the unit imaginary number.Based on the linear wavemaker theory,the first order velocity potential is expressed as
whereg denotes the acceleration of gravity,andhis the water depth.In Eq.(2),the first term is the progressive wave potential,the second term is the evanescent wave potential,k0is the wave number of the progressive wave mode,and knis the wave number of the evanescent wave mode.The values of k0and knare determined from the dispersion relations of the water waves,i.e.,

According to the linearized form of the free surface boundary condition,the wave surface elevation at the paddle is obtained as
where ηprefers to the surface elevation of the progressive wave,which is the target wave in the flume.describes the sum of an infinite series of the evanescent waves,which will decay with the distance from the wave paddle.c0is the transfer function between the surface elevation ηp(t)and the wave paddle position x( t),and the imaginary numberi means a 90ophase shift between them.cnis the transfer function between the surface elevationand the wave paddle position x( t).For a piston-type wavemaker,c0and cnare expressed as

At a low frequency,the evanescent waves will become non-significant after a distance of three wave lengths from the wave paddle.However,at a high frequency they remain significant and even exceed the amplitude of the progressive wave on the paddle.In practice,a finite number of terms are used to evaluate the transfer function cnwith sufficient accuracy.
1.2 Absorption algorithm
As shown in Fig.1,a reflection occurs when the reflected wave impinging on the paddle,producing a re-reflected wave leaving the paddle and being added to the progressive wave.This re-reflected wave can be canceled by moving the paddle to generate a wave of equal amplitude and opposite phase.Hence,the paddle motion can be decomposed into a generation part and an absorption part.Based on the linear theory,the surface elevation in front of the paddle is the superposition of six wave components for an active absorbing wavemaker system,i.e.,

where ηp(t)andare the surface elevations of a progressive wave and the evanescent waves produced by the generation paddle motion.ηr(t)and ηrr(t)are the surface elevations of a reflected wave from the wave flume and a re-reflected wave reflected by the wave paddle.is the surface elevation of a compensation wave produced by the absorption paddle motion.It is required to have an equal amplitude and an opposite phase asis the surface elevation of the evanescent waves associated with the absorption paddle motion.
Now we derive the absorption transfer function in the frequency domain.Let xgen(t)represent the generation paddle motion and let xabs(t)represent the absorption paddle motion.If X( f)and A( f)are complex Fourier amplitudes of x( t)and η(t),where f=σ/2π,we may write Eq.(6) in the frequency domain as

where
Xabsis the desired absorption paddle motion in the frequency domain.Kris the reflection coefficient of the paddle.Kr=1means a full re-reflection on the paddle.Solving Eq.(7),we obtain

where
whereF is the absorption transfer function in the frequency domain.
1.3 Properties of absorption transfer function
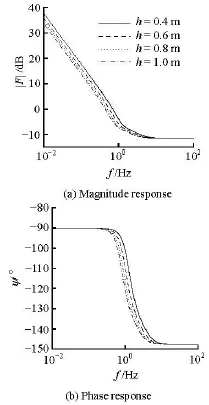
Fig.2 The frequency response of the transfer functionF at different water depthsh (Kr=1)
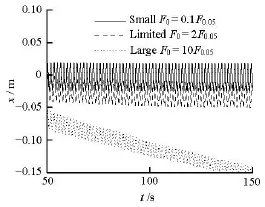
Fig.3 Illustration of the paddle drifting problem (testing on a regular wave with the period 1.6 s and the wave height 0.04 m)
In this part,we analyze the properties of the absorption transfer functionF and discuss the feasibility of realizing it in the time domain.F is not an analytic expression,because k0and kndo not have closed-form solutions (see Eq.(3)),so that c0and cncannot be analytically expressed.Hence,we cannot obtain an analytical time domain expression of Eq.(8)by applying the inverse Fourier transform directly.One solution is finding a new transfer function which is parameterized and approximatesF at the target frequency range.Figure 2 shows the magnitude responses |F| and phase responses ψ of Fat different water depths.In fact,the magnitude response |F| increases towards infinity as fapproaches zero.For convenience,we use F0to denote the magnitude response value ofF at zero frequency.In a physical test,with a large F0,the paddle drifting problem will arise.Figure 3 shows the paddle position of the wavemaker when it works in the absorption mode with differentF0.We can see that when F0is large,the paddle position changes drastically as the time progresses,i.e.,the drifting problem is serious,when F0is limited,the paddle drifting would be much reduced,but it still exists,and whenF0is small,the drifting is very small to be observed.The magnitude response value ofFat 0.05 Hz is a reference value and denoted as F0.05.Therefore,we modifyF by suppressing F0,as shown in Fig.4.With F thus revised,F0= 0.1F0.05,and the magnitude response curve between 0 Hz to 0.05 Hz is obtained by a linear interpolation.
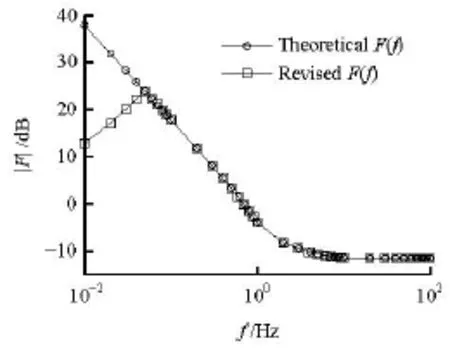
Fig.4 Modify the theoretical transfer function Fby suppressing its magnitude response at zero frequency
2.Formulation of time domain realization
If the input and the output of the system at timet are denoted by u( t)and y( t),the relationship between them can be represented by a linear difference equation

where the coefficients anand bmare assumed to be real valued.In our case,u( t)is ηp,0(t)-η0(t)and y( t)is xabs(t).Let a0=1,Eq.(9) can be rewritten as

Applying theZ transform on both side of Eq.(10),we obtain the transfer function of the system as follows
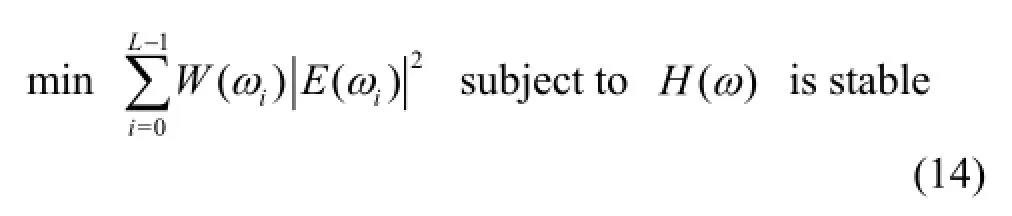
The functions A( z)and B( z)are polynomials in z-1,where z=eiω.Hereωis the digital frequency,the relationship be-tween ωandfis ω=2πf/Fs,whereFsis the sampling frequency of the input and the output.M is the degree of the numerator and N is the degree of the denominator.H( z)is the rational transfer function of a causal IIR digital filter.Let the frequency response of the absorption transfer function F(ω)be specified on a grid of L>M+N+1frequency pointsωi,i=0,1,…,L -1.The frequency response of the IIR filter H(ω)is expected to approximate that ofF(ω)as well as possible.We formulate it as a least-squares problem,i.e.,

where E(ω)=F(ω)-H(ω)is the complex error function.Because the IIR filters are not inherently stable,the stability constraints are incorporated in the design,i.e.,the poles ofH(ω)are required to lie within the unit circle of thezplane[14].Formulating the design problem as a complex optimization problem,we can simultaneously approximate the desired magnitude and phase responses.
3.Solving IIR filter parameters by IRLS algorithm
By solving Eq.(12),we can obtain the polynomial coefficients anand bmof the IIR Filter,which are called the design variables.We define a vectorθ containing the design variables

where the superscriptT denotes the transposition.In order to show the dependence of H(ω)on the design variables,we will use the notationsH(ω,θ)and E(ω,θ)=F(ω)-H(ω,θ).Equation (12) is a nonlinear least-squares problem,which does not have analytical solutions.One approach to solve it is applying the Taylor expansion to linearizeH(ω,θ)and then solving the linear least-squares problem.However,the linearization ofH(ω,θ)changes the objective function.Hence,the result may not optimal for the original nonlinear least-squares problem.In order to improve the fitting performance,a weighted least-squares cost function was suggested by Dumitrescu[15].Enlightened by the iterative technique which is used to solve the lpnorm optimization problems[16],we introduce an iterative reweigh ting strategy.The optimization problem becomes
where W(ω)is a non-negative weighting function.An IRLS algorithm is used to solve Eq.(14).As shown in Fig.5,we have an initial guess of the design variable vectorθ and the weighting matrix W,which is aL×Ldiagonal matrix with diagonal elements W(ω0),W(ω1),…,W(ωL-1).The design variable vectorθis optimized by the Gauss-Newton method with W fixed,and Wis updated according to the new error function E(ω,θ).The updatedWis then used to optimizeθagain.In this way,we optimize θ and calculate Walternatively.The algorithm terminates when,whereεis a small positive number.In our setting,ε=10-5.
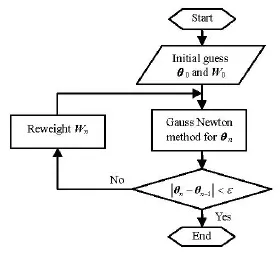
Fig.5 The flowchart of IRLS algorithm
In the following subsections,we will present the implementation details of optimizingθusing the Gauss-Newton method and the updating strategy for W.
3.1 Optimizing design variable vectorθusing Gauss-Newton method
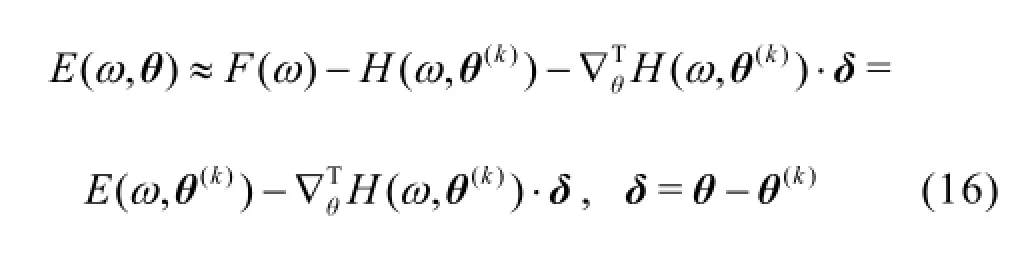
The Gauss-Newton method can be applied to solve the unconstrained nonlinear least-squares IIR filter design problems.At the iteration stepk ,suppose that the current design variable vector is θ(k),the first order Taylor series approximation ofH(ω,θ)about θ(k)is expressed as

where ∇θH(ω,θ(k))is the gradient vector of H(ω,θ)evaluated at δ=θ-θ(k).The second term on the right hand side of Eq.(15) is the inner product of the gradient∇θH(ω,θ(k))and the vector δ=θ-θ(k).The linearization of E(ω,θ)at the iteration stepkis
Replacing the complex error function E(ω,θ)in Eq.(14) by its linearization,and using δ as a vector to be optimized,we obtain the following linear leastsquares problem

Expanding Eq.(17) and ignoring the term that does not depend onδ,we have

in which G(k)=J(k)HWJ(k)and q(k)=Re{J(k)HWe(k)},where the superscript Hdenotes the conjugate transposition,e(k)=[E(ω0,θ(k)),E(ω1,θ(k)),…,E(ωL-1,θ(k))]Tand the Jacobian matrix J(k)=[∇θH(ω0,θ(k)),∇θH (ω1,θ(k)),…,∇θH(ωL-1,θ(k))]T.The matrices G(k)are real valued and positive semi-definite.Solving Eq.(18) is equivalent to computing the solution of the linear equations

If the solution of Eq.(19) is denoted by δ=δ(k),θ is updated by

A line search method can be used to optimize the step size λin every iteration step[17].The algorithm terminates when
In Eq.(17),there is a stability constraint on H(ω,θ)to ensure that the filter is stable.An IIR filter is stable if all of its poles lie within the unit circle of the z plane.Hence,we apply a stabilization technique that replaces the poles outside the unit circle by their reciprocals.Although reflecting poles across the unit circle will change the phase response,the iterative strategy could guarantee the final result to be close to the optimal design.Summarizing,the procedure of the Gauss-Newton algorithm can formulated as follows:
Initialization:guess θ(0)and set k=0,do
compute G(k)and q(k),
solve G(k)δ=q(k)for δ=δ(k),
set θ(k+1)=θ(k)+λ δ(k),λ>0,
if there are poles outside the unit circle in z plane replace the poles by their reciprocals,
put k=k+1,
3.2 Updating strategy for W
In the IRLS algorithm,the weighting matrix W is updated in each iteration.The initial weighting matrix is set to be the unit matrix,i.e.,W0=I .In the nth iteration,the design variable vector is θnand the magnitude of the error function is

The diagonal elements of the new weighting matrix is

where α is a convergence parameter,and α>0.Considering a frequency point ωi,Wn+1(ωi)=1,if En(ωi,θn)=0and Wn+1(ωi)>1,if En(ωi,θn)>0.That means high penalties are imposed on the frequencies with large errors in the next iteration,whereas no penalty is imposed on the frequencies with zero error.In this way,large errors will be reduced but small errors may increase.The total error oscillates at first and converges after several iterations.From Eq.(22),we can see that when α is near zero,the effect of the reweighting strategy is not significant,whereas when α is too large,the penalty will be too sensitive to the errors and it would be hard to converge.Experiments show that we can always choose an α in the range of [1,2.5],with which the IRLS algorithm converges fast and better fitting performance is achieved than by the direct least-squares fitting,which solves Eq.(14) by the Gauss-Newton method without the iterative reweighting scheme.
4.Filter design experiments
The IIR filter H( z)is in the form with an M-order polynomial as the numerator and an N-order polynomial as the denominator.Before estimating thedesign variables θ,we need to determine the polynomial orders M andN.Then we design filters using the IRLS algorithm with the parameterαin Eq.(22)taking several different values.Finally,we compare the fitting performance between the filter designed by the IRLS algorithm and that designed by the direct least-squares method.In all experiments,the sampling frequency Fsis 250 Hz.A set of grid points over[0,π],i.e.,S={ωi|ωi=iπ/(L -1),i=0,1,2,…,L-1},is used to discretize the frequency response of the absorption transfer function.We setL=2501so that the response curves are sampled with a step of 0.05 Hz.
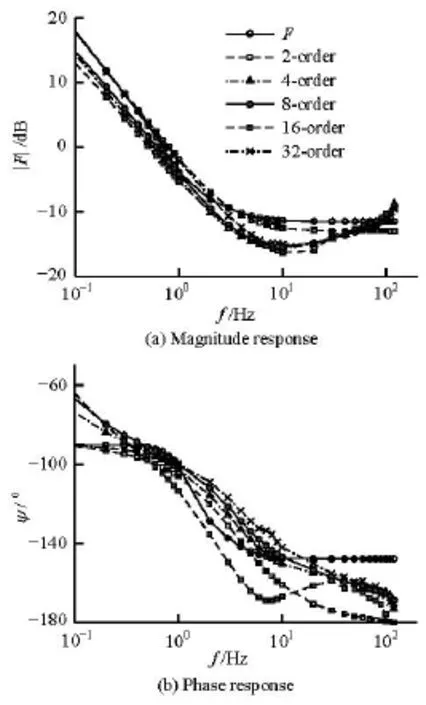
Fig.6 Frequency responses of designed filters H( z)of different orders and those of the absorption transfer function F (h=0.4 m)
4.1 The order of the IIR filter
Figure 6 shows the frequency responses of filters of different orders by the IRLS and those of the absorption transfer function F in the Nyquist frequency domain.For simplicity we assume M=N.From Fig.6(a) we can see that when the order of the filter is 2,the magnitude responses of H( z)are smoother and have similar shapes as those of F.When the order of the filter is higher,the magnitude responses fluctuate and the curves assume larger values than those of F at a high frequency,which will enhance the high frequency noise and cause vibrations of the wavemaker.In order to avoid that kinds of vibrations,the magnitude response of the filter at high frequencies is required to be less than that of F .As described in Section 1.3,the large magnitude response at zero frequency will also cause the paddle drifting problem.Hence,we pay more attention to the magnitude response than the phase response.
To quantify the approximation performance,we define the mean squared error of the magnitude and phase responses as follows:
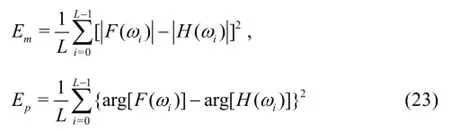
where L is the number of sampling points,Emand Epdenote the magnitude and phase errors,respectively.The results are listed in Table 1.
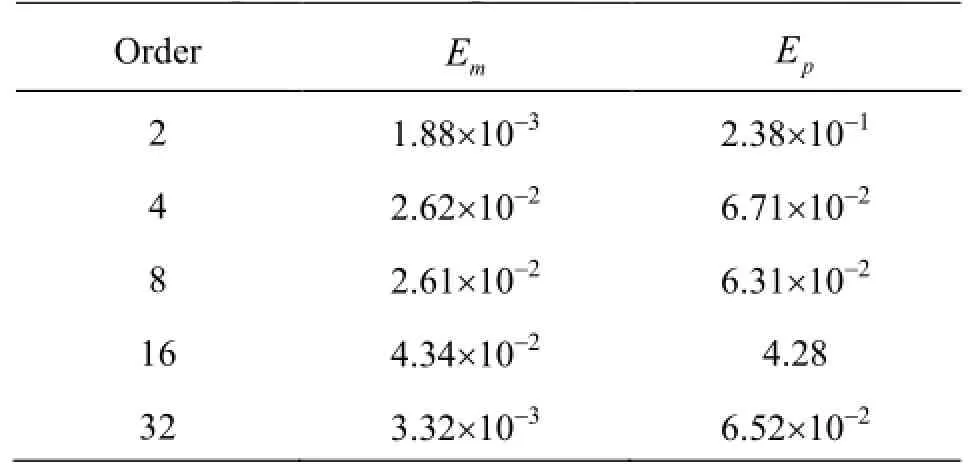
Table 1 Fitting errors of designed filters of different orders
We can see that with the 2-order filter,the smallest error in the magnitude response is obtained and with the 8-order filter,the smallest error in the phase response is obtained.In Eq.(14),there is a stability constraint on H(ω)to ensure that the filter is stable.The poles outside the unit circle are replaced by their reciprocals and higher order filters have more poles to be reflected than lower order filters.Reflecting poles across the unit circle will change the phase response,after a number of iterations,the approximate errors of higher order filters cannot be guaranteed to be smaller than those of lower order filters.In addition,lower order filters are more computationally efficient than higher order filters.Hence,considering that the magnitude response is more important than the phase response to the system,we choose the order of the filter to be 2,i.e.,M=N=2.
4.2 Comparison between the filters designed by IRLS and direct least-squares methods
We compare the filters designed by the IRLS algorithm and the direct least-squares (LS) methods,which are called the IRLS filter and the LS filter for convenience.The mean squared error is used as a comparison criterion,which is calculated by

where L is the number of sampling points and E(ω)=F(ω)-H(ω).

Fig.7 Mean squared error of IRLS filters and LS filters designed with different water depths
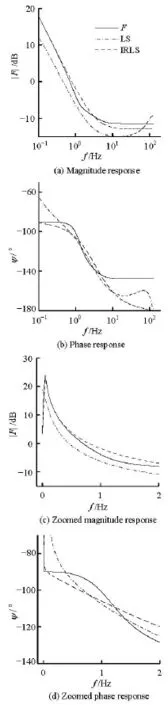
Fig.8 Frequency responses of the IRLS filter and the LS filter
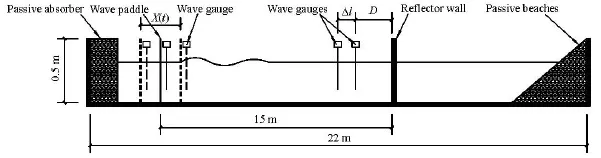
Fig.9 Experimental setup of the active absorbing wavemaker system
In the IRLS algorithm,there is a parameter α in the updating formula of the weighting matrix (see Eq.(22)).In the IRLS algorithm,we let α vary from 1 to 2 .5 and the mean squared error of the de signed filters is plotted in Fig.7.Four representative water depths,i.e.h =0.4 m,h =0.6 m,h =0.8 m and h=1.0 m,are tested,corresponding to Figs.7(a),7(b),7(c) and 7(d),respectively.We can see that in most range of α between 1 and 2.5,the IRLS filters lead to smaller fitting errors than the LS filters.For some values of α,the IRLS filters are not better than the LS filters,because the IRLS algorithm may converge to a local minima.This is a limitation of the IRLS algorithm.However,this problem can be solved by searching for the value ofαfrom 1 to 2.5 to avoid the local minima,and then with the IRLS algorithm,a better filter can always be obtained than with the LS method.
Figure 8 shows the frequency responses of the IRLS filter and the LS filter designed under the condition of h =0.4 m and α=1.5.Figures 8(a) and 8(b)show the magnitude and phase responses in the Nyquist frequency domain.We can see that with the LS filter,larger fitting error is obtained than with the IRLS filter,and the magnitude response of the LS filter is larger than that of F at a high frequency.Figures 8(c) and 8(d) show the zoomed magnitude and phase responses at frequencies from 0 Hz to 2 Hz.We can see that the IRLS filter successfully suppresses the magnitude response at zero frequency to a small value.Although the LS filter can also control the magnitude response at zero frequency,the value is still larger than that obtained by the IRLS filter.of the flume to monitor the generated and reflected waves by the two point method[18].The driving power for the absorbing wavemaker is provided by a servocontrolled A.C.motor,and a wave gauge is mounted on the front of the paddle.The wavemaker can work in the absorption active and inactive conditions by switching the absorption controller to be in or out in the control loop.
The experiments are conducted with regular and irregular waves.The wave period T for the regular wave and the peak wave period Tpfor the irregular wave vary from 1.0 s to 2.0 s with an increasing step of 0.2 s.Table 2 gives the wave parameters used in the experiments.In Table 2,His the wave height of a regular wave,Hsis the significant wave height of an irregular wave.For irregular waves,the modified JONSWAP spectrum[19]is used as the target spectrum.The spectral enhancement parameter is taken as γ = 3.3.
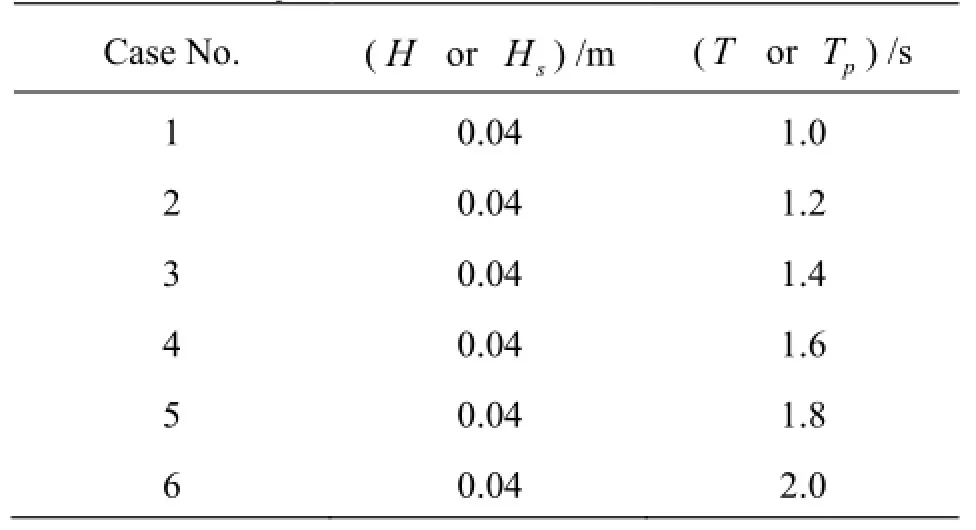
Table 2 Summary of the test waves
5.Physical experiments
5.1 Experimental setup
The wavemaker system is installed in a flume in the State Key Laboratory of Coastal and Offshore Engineering,Dalian University of Technology.As shown in Fig.9,the wave flume is 22 m long and 0.5 m wide,the maximum water depth is 0.5 m.In this study the still water level is 0.4 m.Passive absorbers are set behind the wavemaker and at the end of the flume.The vertical reflector wall placed in the flume is used to make reflections.The distance between the reflector wall and the wavemaker is 15 m.Two wave gauges are installed at a distance of ∆ lin the middle
5.2 Experimental results for regular waves
We first test the system with regular waves.The vertical reflector wall is placed in the flume.Figure 10 shows a comparison of several measured waves in front of the vertical reflector wall from 100 s to 200 s under the absorption active and absorption inactive conditions.This time duration is long enough for the waves to spread repeatedly between the wavemaker and the reflector wall for several times.In addition,the position of the wave gauge is adjusted to measure the standing wave crest.We can see that under the absorption inactive condition,the measured waves areunstable because of the multiple wave reflections.However,under the absorption active condition,the measured waves are stable and the waves are typical standing waves.This verifies that the absorbing wavemaker controller is effective for the regular wave absorption.
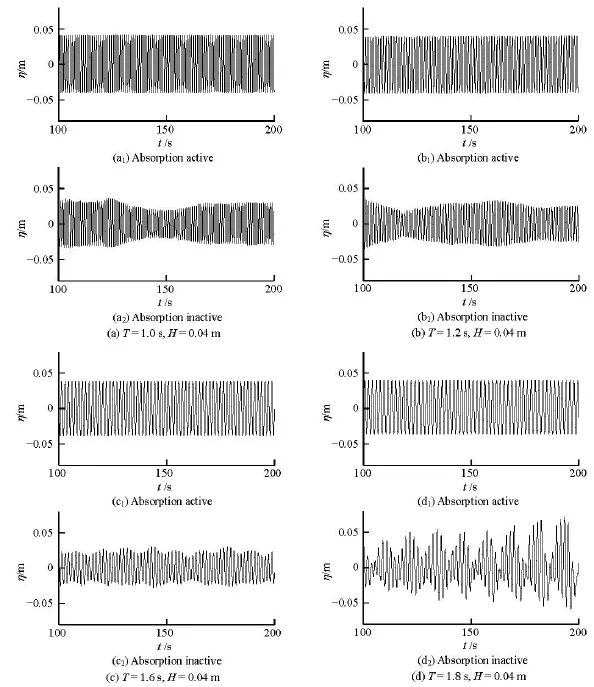
Fig.10 Comparisons of measured continuous waves under absorption active and absorption inactive conditions
Then we compare the performance of our method with Liu et al.'s approach[3],which is called the representative frequency method (RF method),because they use the same mechanical setup as in this paper and with a different control algorithm.Figure 11 shows the measured surface elevation of one regular wave in front of the vertical reflector wall and the measured paddle position of the wavemaker.From Fig.11(a),we can see that both of the measured surface elevations are stable and are typical standing waves.This verifies that both methods can achieve an effective absorption for this regular wave.However,in Fig.11(b),the paddle position of the RF method is drifted seriously,whereas the mean paddle position of our method is stable.Table 3 gives the offset of the paddle at time 100 s in a series of tests with different wave periods.It is shown that the paddle drifting problem can be effectively suppressed by our method.As mentioned in Section 1.3,with the original theoretical transfer function,a very large magnitude response is obtained at zero frequency,which is also the case with Liu et al.'s method.Our method modifies the transfer function in the frequency domain,and the proposed IRLS algorithm can fit the modified transfer function well.Hence,the paddle drifting problem is avoided.
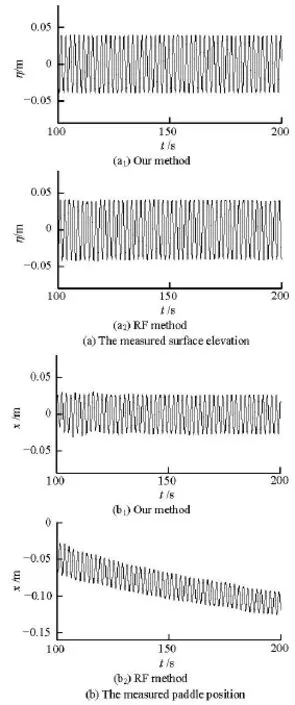
Fig.11 Comparison of our method and RF method on an example regular wave (T =1.6s,H=0.04 m)
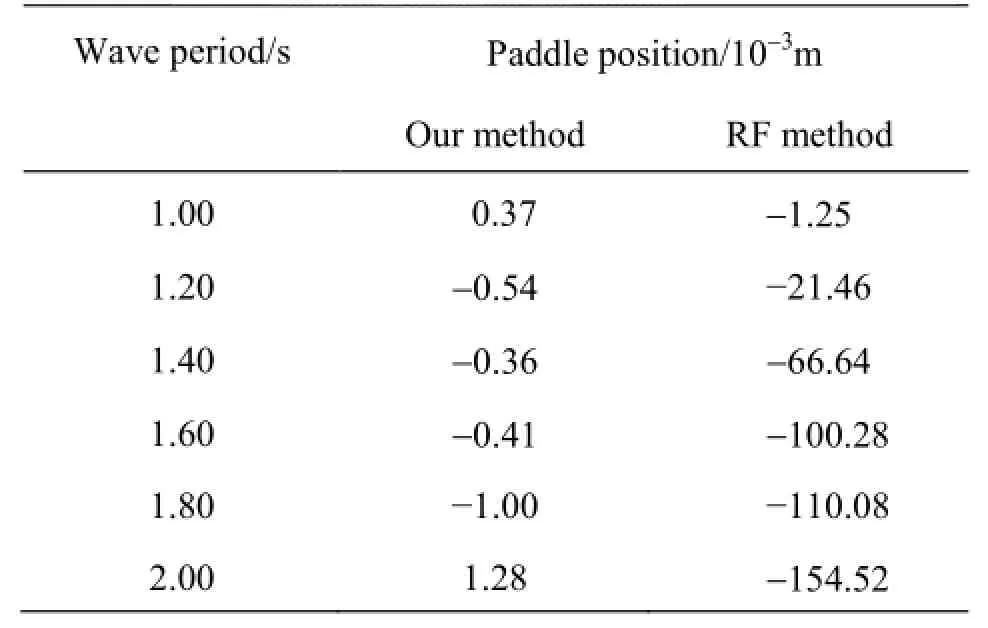
Table 3 Offset values of paddle position at time 100 s

Fig.12 The separated progressive wave spectra obtained by our method and the RF method in absorption active and inactive modes
5.3 Experimental results for irregular waves
Experiments on irregular waves are also conducted.Firstly,open field experiments are carried out to measure the target spectra,considering only the wave generation,i.e.,with no vertical reflector wall in the flume.Secondly,closed field experiments are carried out with the vertical reflector wall placed in the middle of the flume.The time duration of the test is 240 s.The progressive wave spectra are separated under the absorption active and absorption inactive conditions.Figure 12 shows the separated progressive wave spectra obtained by our method and the RF method in the absorption active and inactive modes.We can see that in the absorption inactive mode,the energy of the separated progressive spectrum is much larger than that of the theoretical spectrum,in the absorption active mode,the separated progressive spectra of both methods are close to the target spectrum,which verifies the absorption effect.Moreover,the spectrum of our method is even closer to the target spectrum than that of the RF method.For example,with the latter method,a larger error is observed at the peak of the spectrum.To quantify the performance of the absorption system,two parameters are defined as follows

where Saand Srare the integral areas of the separated progressive wave spectra under the absorption active and absorption inactive conditions,andSois the integral area of the target spectrum.Rarepresents the absorption rate for irregular waves,and Errmeasures the error between Saand So.Table 4 presents Raand Errof a series of tested irregular waves.We can see that our method achieves a higher absorption rate and a lower error than the RF method consistently.
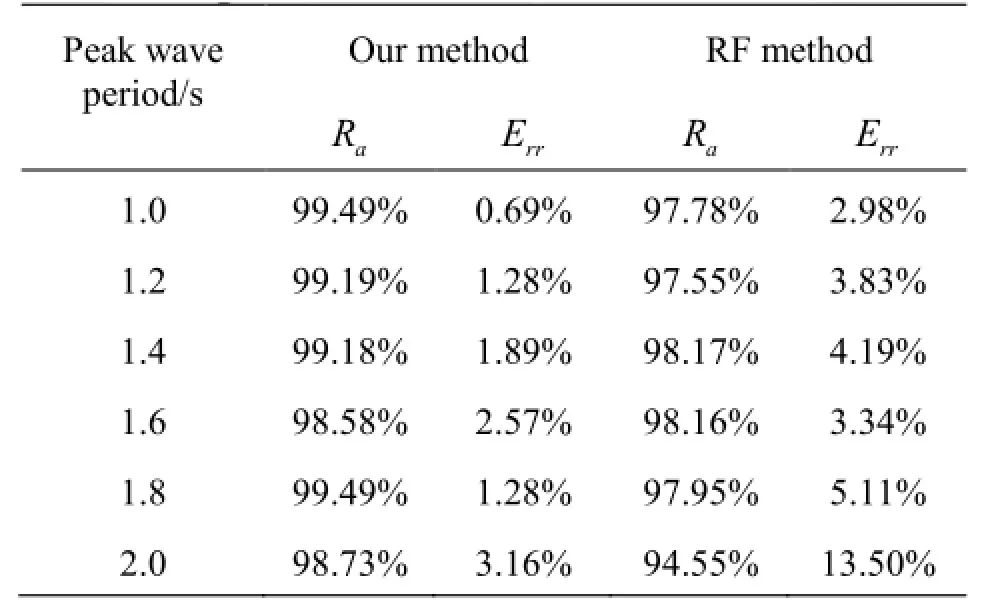
Table 4 Absorption rate and spectrum error of the tested irregular waves
6.Conclusion
In this paper,a frequency domain absorption transfer function is derived,and the properties of the transfer function are discussed.When the magnitude of the transfer function is large at zero frequency,a paddle drifting problem will be caused.A modification of the transfer function is made to avoid this problem.An IRLS algorithm is proposed to design the controller,which is an IIR digital filter that approximates the transfer function in the least-squares sense.Compared with direct least square method,the IRLS algorithm achieves smaller approximation errors and the wave paddle drifting problem is avoided.Physical experiments are carried out with the designed filter.The results show that the absorbing controller performs well for both regular and irregular waves.
[1]MILGRAM J.H.Active water wave absorbers[J].Journal of Fluid Mechanics,1970,42(4):845-859.
[2]CHRISTENSEN M.,FRIGAARD P.Design of absorbing wavemaker based on digital filters[C].Proceedings of the international symposium:Waves-Physical and Numerical Modelling.Vancouver,Canada,1994,100-109.
[3]LIU Shu-xue,WANG Xian-tao and LI Mu-guo et al.Active absorption wave maker system for irregular waves[J].China Ocean Engineering,2003,17(2):203-214.
[4]LIU Shu-xue,WU Bin and LI Mu-guo et al.Irregular active absorbing wave maker system [J].Chinese Journal of Hydrodynamics,2003,18(5):532-539(in Chinese).
[5]SCHÄFFER H.A.,JAKOBSEN K.P.Non-linear wave generation and active absorption in wave flumes[C].Proceedings of Long Waves Symposium 2003 in Parallel with XXX IAHR Congress.Thessaloniki,Greece,2003,69-77.
[6]SCHÄFFER H.A.,KLOPMAN G.Review of multidirectional active wave absorption methods[J].Journal of Waterway,Port,Coastal and Ocean Engineering,2000,126(2):88-97.
[7]SPINNEKEN J.,SWAN C.Second-order wavemaker theory using force-feedback control.Part I:A new theory for regular wave generation[J].Ocean Engineering,2009,36(8):539-548.
[8]SPINNEKEN J.,SWAN C.The operation of a 3D wave basin in force control[J].Ocean Engineering,2012,55(17):88-100
[9]De MELLO P.C.,CARNEIRO M.L.and TANNURI E.A.et al.A control and automation system for wave basins[J].Mechatronics,2013,23(1):94-107.
[10]HIGUERA P.,LARA J.L.and LOSADA I.J.Realistic wave generation and active wave absorption for Navier-Stokes models:Application to OpenFOAM®[J].Coastal Engineering,2013.71(1):102-118.
[11]ZHANG H.A deterministic combination of numerical and physical models for coastal waves[D].Doctoral Thesis,Lyngby,Denmark:Technical University of Denmark,2005.
[12]NONGPIUR R.C.,SHPAK D.J.and ANTONIOU A.Improved design method for nearly linear-phase IIR filters using constrained optimization[J].IEEE Transactions on Signal Processing,2013,61(4):895-906.
[13]LANG M.C.Least-squares design of IIR filters with prescribed magnitude and phase responses and a pole radius constraint [J].IEEE Transactions on Signal Processing,2000,48(11):3109-3121.
[14]ANTONIOU A.Digital signal processing:Signals,systems,and filters[M].New York,USA:McGraw-Hill,2005,529-530.
[15]DUMITRESCU B.Optimization of two-dimensional IIR filters with nonseparable and separable denominator[J].IEEE Transactions on Signal Processing,2005,53(5):1768-1777.
[16]VARGAS R.A.,BURRUS C.S.Iterative design ofpl FIR and IIR digital filters[C].13th IEEE Digital Signal Processing Workshop/5th IEEE Signal Processing Education Workshop.Marco Island,Florida,USA,2009,468- 473.
[17]CHONG E.K.P.,ZAK S.H.An introduction to optimization[M].Fourth Edition,Hoboken,USA:John Wiley and Sons,2013,124-125.
[18]GODA Y.,SUZUKI Y.Estimation of incident and reflected waves in random wave experiments[C].Proceedings of the 15th Coastal Engineering Conference.New York,USA,1976,828-845.
[19]GODA Y.A comparative review on the functional forms of directional wave spectrum[J].Coastal Engineering Journal,1999,41(1):1-20.
10.1016/S1001-6058(16)60622-4
(Received May 13,2014,Revised January 16,2015)
* Project supported by the National Natural Science Foundation of China (Grant No.51221961),the National Key Basic Research Development Program of China (973 Program,Grant Nos.2013CB036101,2011CB013703)
Biography:Hong-qi YANG (1984-),Male,Ph.D.Candidate
Mu-guo LI,E-mail:lmguo@dlut.edu.cn
2016,28(2):206-218
- 水动力学研究与进展 B辑的其它文章
- Manoeuvring prediction based on CFD generated derivatives*
- Effects of water flow on the uptake of phosphorus by sediments:An experimental investigation*
- Improved formulas for thermal behavior of oscillating nanobubbles*
- Lattice Boltzmann method for Casimir invariant of two-dimensional turbulence*
- The experiment and analysis of transitional flow in pipe*
- Numerical simulation of 3-D free surface flows by overlapping MPS*