基于RT-LAB的模拟螺旋桨负载控制系统实时仿真
2016-10-14 15:21曾宏宇
船电技术 2016年4期
曾宏宇,黎 波,龙 飞
基于RT-LAB的模拟螺旋桨负载控制系统实时仿真
曾宏宇,黎 波,龙 飞
(武汉船用电力推进装置研究所,武汉 430064)
综合考虑螺旋桨与船体的相互作用,以RT-LAB软件为基础建立了螺旋桨负载控制系统模型,并运用simulink代码生成技术实现实时代码的自动生成。文章根据某型实船数据,借助OP5600实时仿真机进行仿真试验,结果与实际螺旋桨特性基本一致,验证了实时仿真的准确性,为构建模拟螺旋桨负载半物理仿真平台提供了准确、可靠的控制系统。
螺旋桨负载 代码生成技术 RT-LAB 实时仿真
0 引言
随着电力推进逐步成为现代船舶推进方式新的发展方向,开展电力推进系统的研究显得越来越重要。而螺旋桨作为推进器在电力推进系统中占有重要地位,对其开展研究是深入认识电力推进系统的关键。
本文开展基于RT-LAB的模拟螺旋桨负载控制系统的实时仿真研究能够为构建模拟螺旋桨负载半物理仿真平台提供真实可靠的负载特性曲线,提高仿真系统的置信度,大大降低电力推进系统的开发难度和试验成本。如图1所示为已构建的模拟螺旋桨负载半物理仿真平台示意图。
本平台所用推进电机和负载电机均使用SINAMICS S120 AC/DC多轴驱动器,供电电源取自380V交流电网。其中,推进变频器采用DFE电源模块,经过电机模块直接驱动推进电机。同时,其控制单元CU320通过扩展的TM31模块将采集到的实际转速经I/O接口传送至Opal-RT公司的实时仿真机(OP5600)内部的螺旋桨模拟负载控制系统。负载回馈变频器则采用AFE电源模块,使回馈电流谐波含量大大降低,减小对电网的干扰。同时,其控制单元CU320通过扩展TM31模块接收来自仿真机内控制系统的输出给定转矩,实现对负载电机的转矩控制,从而达到模拟螺旋桨负载的目标。
1 负载电机控制系统的建立
进行模拟螺旋桨负载控制系统的仿真分析,首先需要建立控制系统的数学模型(船桨模型)。控制系统主要包括:船舶阻力模型,螺旋桨进速模型,进速比模型,螺旋桨推力和转矩模型,以及船舶运动模型。下面重点介绍控制系统中主要部分的数学模型。
1.1 螺旋桨转矩与推力计算模块
进行螺旋桨转矩与推力计算的前提是获取螺旋桨特性,即

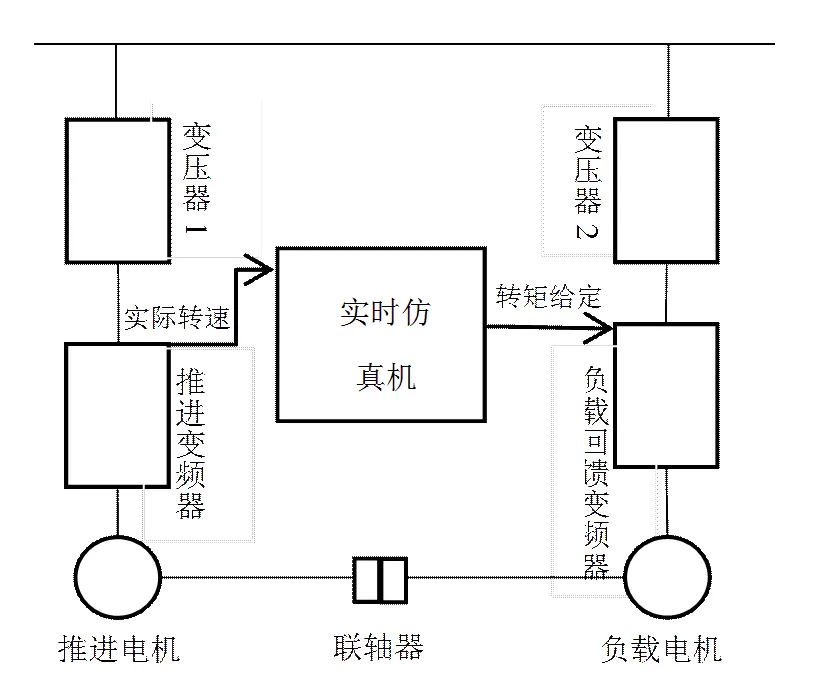
图1模拟螺旋桨负载半物理仿真平台
目前该特性曲线应用较为广泛的有图谱和解析式两种形式。本文选用的诺尔特斯特洛姆系列试验图谱是哥德堡水池进行=4,=0.45,=0.0~1.6的全程试验图谱(主要针对直推单桨船舶)。由于它生动反映了各种工况下螺旋桨的运行情况,且螺距比变化范围大,具有一定代表性,在推进仿真中具有很大参考价值。该系列螺旋桨特性曲线如图2、3所示。其中,两特性曲线的第一象限部分对应为螺旋桨推船前进(正航)状态;第二象限部分对应为船舶正航时拉倒车(船舶由前进转变成倒退运行)状态;第三象限部分对应为船舶后退时用倒车(倒航)状态;第四象限部分对应为船舶倒航时拉正车(船舶由倒退转变成前进运行)状态。
为了便于数学分析和模型搭建,本文将选用该图谱的解析形式(8阶切比雪夫多项式)来计算。将切比雪夫多项式转换为普通多项式后,结果如下:


上式中各项系数可查表获得。
由此可得螺旋桨推力、转矩的计算公式为:

1.2 有效推力模型
由于螺旋桨在船尾运动时引起水流变化,导致船尾压强重新分布,从而引起船体阻力增大。设螺旋桨产生的推力为,则其中一部分用于克服不带螺旋桨时的阻力,另一部分用于克服螺旋桨运动产生的阻力增额ΔR(推力减额),即
在工程上通常使用推力减额系数来表征推力减额大小,即
所以,有螺旋桨存在时,船的有效推力为:
1.3船体阻力模型
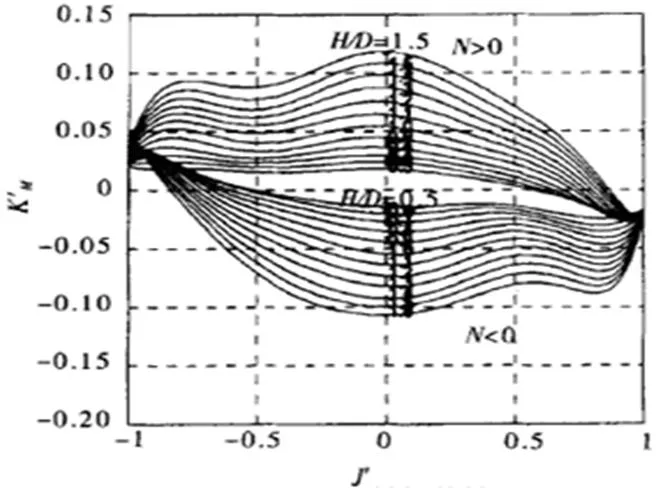
图2 转矩特性
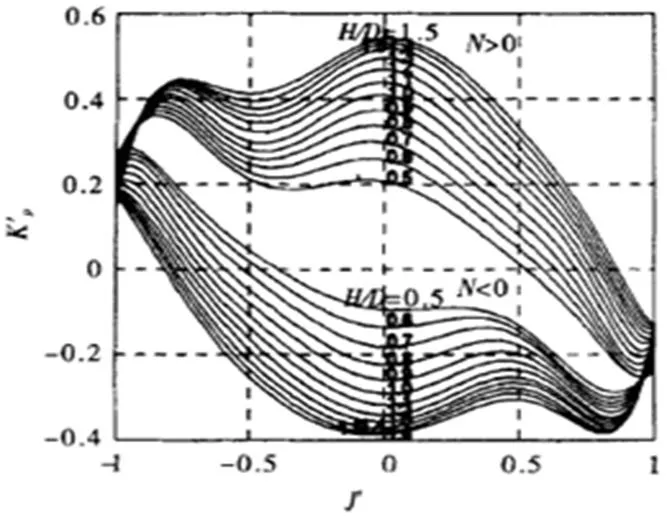
图3 推力特性
船舶在水面航行时所受到的总阻力主要由两部分组成,一部分是静水中的裸船体阻力,另一部分为附加阻力。其构成如图4所示。
鉴于本文重点研究在无风浪海况下模拟螺旋桨负载控制系统的实时仿真,暂不考虑复杂海况对螺旋桨运行的影响。因此,阻力计算模型只包含摩擦阻力和剩余阻力两部分。根据“相当平板”理论,加上实际应用时引入的“形状修正因子”和“粗糙度补贴系数”的概念,得到船体摩擦阻力计算公式:
式中,k为形状修正因子C为阻力系数,ΔC为粗糙度补贴系数,为船速,为湿表面积,为海水密度。
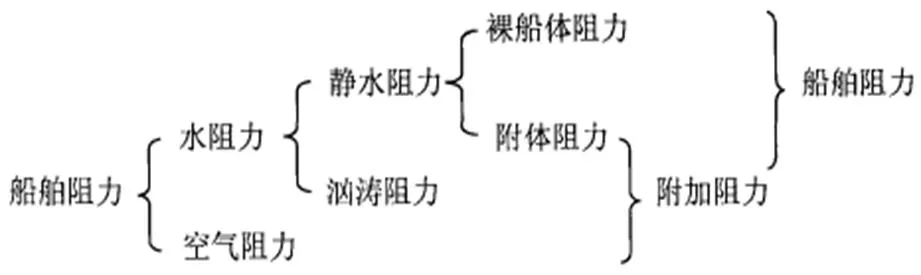
图4 船舶阻力构成
剩余阻力的计算则采用常用的兰波-凯勒图谱,可以求得剩余阻力系数C。
因此,船桨总阻力计算公式为:
1.4船舶运动模型
建立船桨系统的运动方程:
式中,为船舶吨位,单位为t;为船体附加质量,单位为t。按经验’可取船体质量的5%~15%。
由上式即可求得船速v。
2 RT-LAB建模
RT-LAB的设计与开发流程是:首先按照其建模规则在Matlab/Simulink环境下进行系统建模,然后通过RT-LAB对系统模型进行分割处理、编辑、编译、实时代码生成,最后将实时代码下载至OP5600实时仿真机中执行。
2.1模型的建立
首先在Matlab/Simulink中建立控制系统的仿真模型,如图5所示。然后根据RT-LAB要求对模型进行分割,将需要进行在线监测的工况输入、输出航速、输出进速、输出转矩、输出推力、推进功率通过OpComm模块引至监控台子系统(前缀为SC_)中,将剩余的模型计算部分置于模型子系统(前缀为SM_)中。如图6、7所示,分别为分割后的监控台子系统和模型子系统,图8、9为船体模块和螺旋桨模块内部。
进行系统建模时,从基于模型设计开发的角度出发,为了更好地实现一些特定算法(如转矩系数计算模块),使用了自定义S函数模块。按照执行方式不同,常用的S函数有M S函数和C Mex S函数,根据本系统需要生成嵌入式C代码进行实时仿真的要求,以及从仿真的快速性出发,选用C Mex S函数进行算法的编写,编写完成后需要先配置Matlab编译器,然后使用Mex命令将C文件形式的S函数编译为Mex文件才可正常使用C Mex S函数。

图5 船桨仿真模型
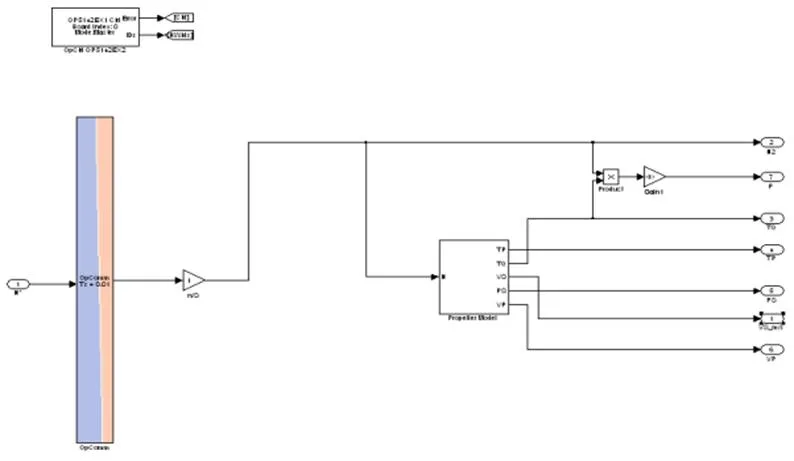
图6 S_M模型子系统
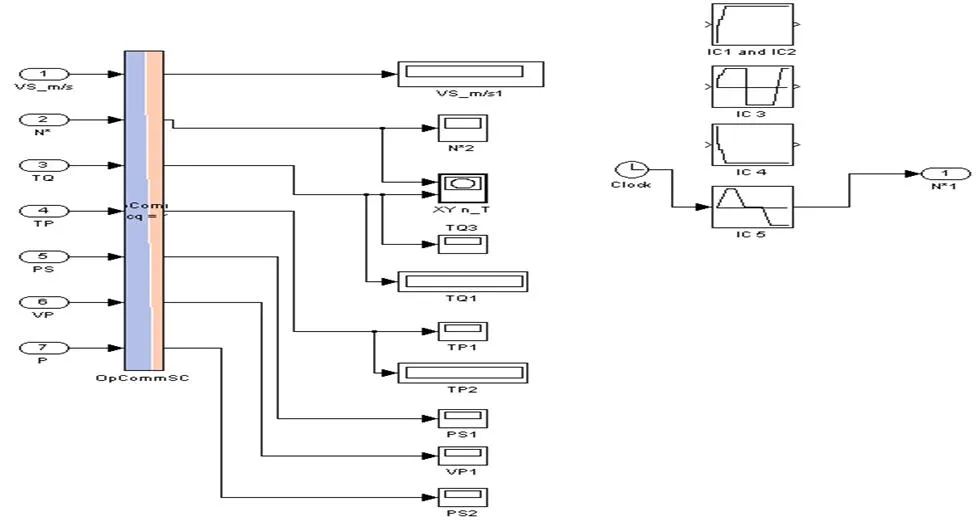
图7 S_C监控台子系统

图8 船体模块
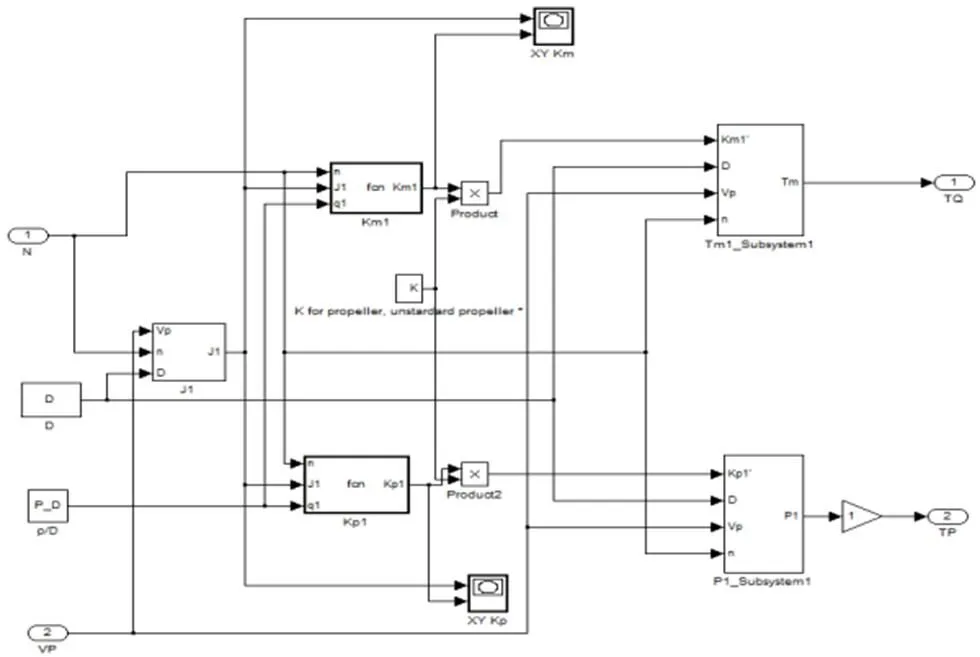
图9 螺旋桨模块
2.2模型的编译与代码生成
RT-LAB通过调用Matlab中的实时工作空间RTW来自动生成可在实时仿真机中执行的嵌入式C代码,从而生成可执行目标文件。整个编译过程为系统自动进行,可以大大提高基于模型设计的嵌入式开发效率。下面简要介绍可执行目标文件生成的流程:先通过Build选项对模型的描述文件进行编译,然后调用TLC目标语言编译器产生模型的C源程序,再调用Make过程生成联编文件,最后由联编应用程序生成可执行程序。
此流程中,TLC编译是保证整个编译过程成功的关键。在TLC编译过程中会使用到三类文件:系统TLC文件、模块TLC文件、其他TLC函数库。在船桨模型编译过程中,这三类文件中的系统TLC文件、Simulink自带模块的TLC文件以及TLC函数库已经由MathWorks公司预先编写好,因此在代码生成时能够顺利通过编译。而本文解决的一个关键技术就是为系统模型中C Mex S函数模块形式的自定义算法编写对应的模块级TLC文件。分别对各算法模块进行调试后,均通过RT-LAB编译,并顺利下载至实时仿真机中,成功实现相关算法的功能。
2.3模型的下载与执行
将编写完成的C Mex S函数文件及其对应的TLC文件均置于控制系统所在目录下。对控制系统编译成功后,下载至实时仿真机中,待在线监控窗口自动弹出后即可执行模型。
3 仿真试验验证
本文以某实船船型数据为依据:船舶吨位为6914吨,额定航速为7.2 m/s,船长112.1 m,型宽17.5 m,吃水4.5 m,螺旋桨额定转速为2.583 r/s,直径为2.76 m,螺距比为0.7。
分别对船舶分级启动正航、倒航、先正航后倒航三种典型工况进行实时仿真。对以上三种工况的设定和输出特性的监测均在上位机中的监控窗口进行,如图10为监控窗口。
将仿真结果与实船各典型工况的理论特性曲线相比较,结果基本一致。本研究证实了模拟螺旋桨负载控制系统的准确性与可靠性,可以用于模拟实船螺旋桨运行状态。
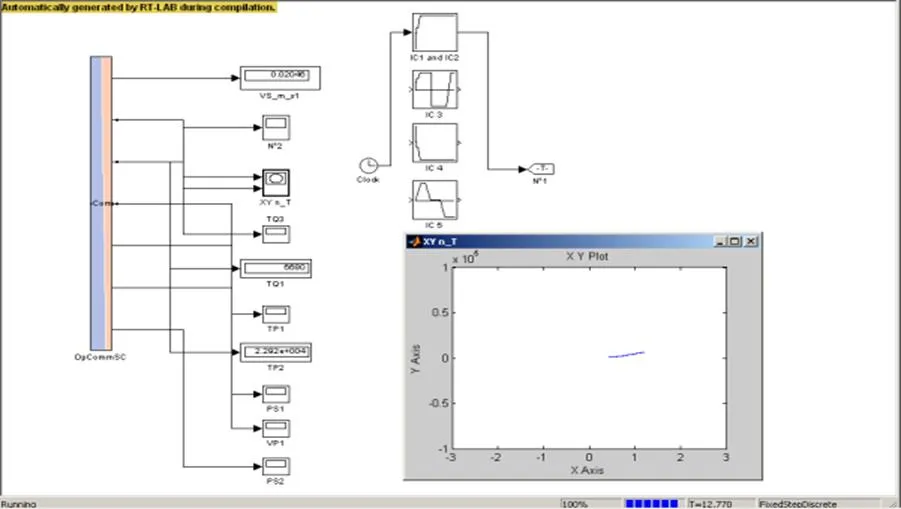
图10 在线监测窗口
各典型工况实时仿真结果如图11、12、13。
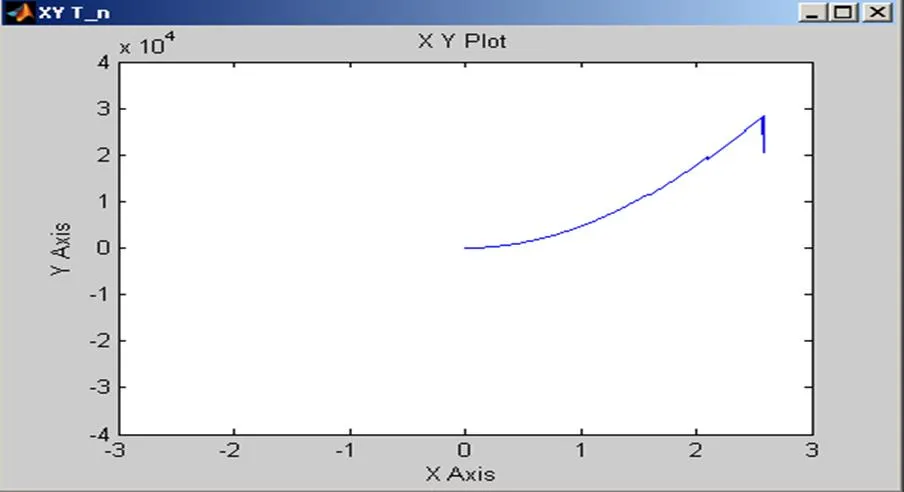
图11 分级启动n-T曲线

图12 倒航n-T曲线
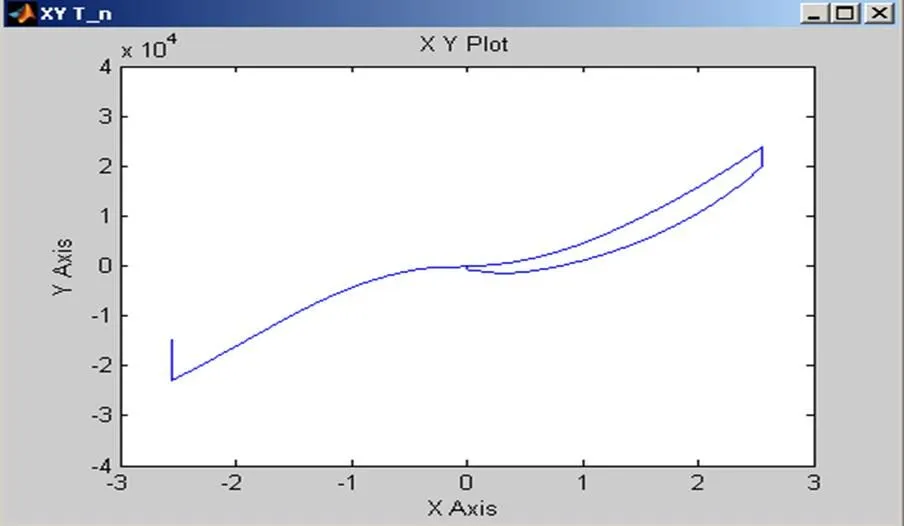
图13 先正航后倒航n-T曲线
4 结论
本文围绕螺旋桨模拟负载的实时仿真展开研究,采用RT-LAB实时仿真平台对模拟螺旋桨控制系统进行实时仿真分析,结果证实了螺旋桨模拟负载控制系统的可靠性和准确性。以此为基础,结合OP5600实时仿真机已具备的硬件条件,能够采集推进电机实际转速信号,输出负载电机给定转矩信号,为已建立的模拟螺旋桨负载半物理仿真平台提供可行性依据和硬件支持。
同时,在研究过程中所应用的嵌入式C代码生成技术,不仅能够用于RT-LAB实时仿真平台,还可用于DSP、FPGA等大量嵌入式软件开发平台,能够充分满足用户多样化的需求,为今后进行基于模型的开发设计提供了一个快速有效的途径,大大提高了嵌入式开发效率。
[1] 姚新宇, 黄柯. 半实物仿真系统的实时性分析[J]. 计算机仿真, 1999, (10).
[2] 康凤举. 现代仿真技术与应用[M]. 北京: 国防工业出版社, 2006: 269-306.
[3] 姜东红, 吴根水, 屠宁. RT-LAB软件在半实物仿真系统中的应用[J]. 测控技术, 2008, 27(4): 71-73.
[4] 孙忠潇. Simulink仿真及代码生成技术入门到精通[M]. 北京: 北京航空航天大学出版社, 2015: 446-460.
[5] 高海波. 船舶电力推进系统的建模与仿真[D]:[博士学位论文]. 武汉: 武汉理工大学, 2008.
[6] 范尚雍. 船舶动力装置及仿真技术[M]. 上海: 交通大学出版社, 1993
[7] 李殿璞. 系列螺旋桨四象限特性Chebyshev多项式拟合结果及误差分析[R]. 哈尔滨: 哈尔滨工程大学, 2000.
[8] 陆金铭, 船舶动力装置原理与设计[M]. 北京: 国防工业出版社, 2014.
RT-LAB –based Real-time Simulation of Control System of Propellers Loading
Zeng Hongyu, Li Bo, Long Fei
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
Considering the interaction of ship and propeller, this paper builds a mathematical model of the control system of propeller loading by RT-LAB, and uses the technology of automatic code generation in simulink to achieve real-time generation. Based on the data of real ship, the model is loaded to the OP5600 HILBOX to execute. Comparing the real-time simulation result with the actual propeller curve, it shows that real-time simulation is accurate, and it provides the accurate and reliable control system for a hardware-in-the-loop simulation platform of propeller loading.
propellers loading; automatic generation; RT-LAB; real-time simulation
TP391.9
A
1003-4862(2016)04-0069-04
2015-10-16
曾宏宇(1991-),男,硕士研究生。研究方向:船舶电力推进系统仿真。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
航空发动机(2020年3期)2020-07-24
仪器仪表用户(2020年5期)2020-05-04
现代电子技术(2019年22期)2019-11-20
兰台世界(2017年10期)2017-06-01
电子世界(2016年15期)2016-08-29
电子科技(2015年2期)2015-12-20
焊接(2015年9期)2015-07-18
海军医学杂志(2015年2期)2015-02-27
中国舰船研究(2014年6期)2014-05-14