基于两相正交型开关霍尔转子位置预估方法
2016-10-14 02:48:50秦海鸿李寒松曾庆喜
电工技术学报 2016年3期
荀 倩 秦海鸿 李寒松 聂 新 曾庆喜
(1.南京航空航天大学江苏省新能源发电与电能变换重点实验室 南京 210016 2.南京航空航天大学机电学院 南京 210016 3.南京航空航天大学能源与动力学院 南京 210016)
基于两相正交型开关霍尔转子位置预估方法
荀倩1秦海鸿1李寒松2聂新1曾庆喜3
(1.南京航空航天大学江苏省新能源发电与电能变换重点实验室南京210016 2.南京航空航天大学机电学院南京210016 3.南京航空航天大学能源与动力学院南京210016)
为了拓展永磁同步电机在低成本电力拖动系统中的应用,在分析霍尔估算原理的基础上,利用两相正交型开关霍尔传感器对永磁同步电机转子位置估算方法进行了研究,并对霍尔位置估算方案的原理误差和霍尔安装引起的固有误差进行了分析。最后在STM32微控制器上完成了转子位置估算的软件设计,实现了永磁同步电机的闭环控制。实验结果表明采用两相正交型开关霍尔进行转子位置检测,能得到较好的位置准确度,性价比高,可以应用于对成本要求苛刻的永磁同步电机控制场合。
低成本电力拖动两相正交型霍尔转子位置估算误差分析
0 引言
永磁同步电机以结构简单、运行可靠、体积小、重量轻、损耗小以及效率高等特点被广泛应用于家用电器、交通工具和工业控制等领域[1],在低成本电力拖动系统中有着广阔的应用市场,这些应用领域不仅对成本要求苛刻,而且需要电机具有优良的调速性能,因此,可靠的低成本位置估算成为整个运动控制中至关重要的一部分。
传统的转子位置检测器有光电编码盘、旋转变压器、感应同步器及线性霍尔等传感器件[2]。近年来,多种通过测量电参数以获取转子位置和转速信息的无位置传感器控制技术相继被提出,包括反电动势法、电感法、磁链法、高频注入法、观测器法及卡尔曼滤波器法[3-9]。
对于采用位置传感器的转子位置检测方法,除了开关型霍尔传感器,其他几种位置传感器价格都偏高,不适用于对成本要求较高的运动控制领域。而当前无位置传感器技术在理论和技术上不够完善,特别在起动和低速时的转子位置估算误差较大,这会影响到电机的起动转矩、起动电流,影响低速运行的平稳性,甚至会造成起动失败,所以一般要对起动时刻的位置预估值单独处理以实现电机的可靠起动[10]。综合考虑成本、可靠性以及开发难度等因素,采用开关型霍尔传感器配置合适的转子位置估算方法以满足低成本的永磁同步电机驱动应用。
基于开关型霍尔传感器的转子位置检测技术根据所用开关霍尔的数量可以分为基于三相对称开关霍尔、基于两相正交开关霍尔和基于单个开关霍尔三种检测技术。基于三相对称开关霍尔的转子位置检测方法,理论上可以获得较高的位置检测准确度,特别是在速度波动较大的电机起动阶段,但对霍尔信号的对称性要求较高。基于单个开关霍尔的转子位置检测方法成本最低,避免了霍尔传感器的安装误差,但是单个霍尔传感器不能携带电机的转向信息,只能获得速度和位置信号[11]。本文采用两相正交型开关霍尔进行转子位置检测,比三相开关霍尔应用成本低,减小了霍尔安装带来的硬件误差;相比于单相开关霍尔,可以获得电机的转向信息,两相正交型开关霍尔在三种开关霍尔传感器中,具有更高的性价比。
文献[2,10-16]采用霍尔传感器作为转子位置检测器,其中文献[2,10,12-14]对三相对称霍尔转子检测技术进行了研究;文献[11,15,16]对两相正交型开关霍尔进行了研究,文献[15,16]给出了霍尔位置估算原理,并利用FPGA进行了实验,但位置估算采用Verilog HDL硬件行为描述语言,需要对霍尔信号进行不断采集,语句的执行难免会有延时,导致位置更新不及时、CPU利用率高。
本文设计的两相正交型开关霍尔对永磁同步电机转子位置进行估算的方案与文献[15,16]不同,霍尔信号的检测采用定时器中断的方式,提高了CPU利用率,而且位置信号可及时更新。相比文献[10,15,16]增加了对霍尔位置估算方法引起的原理误差和霍尔安装引起的固有误差的分析,最后在意法半导体推出的STM32微控制器上完成了转子位置检测方案的软件设计,实现了永磁同步电机的闭环控制。
1 位置估算原理设计
1.1位置估算方法的原理介绍
利用两相正交型开关霍尔传感器进行转子位置检测,是在永磁同步电机定子上安装两个霍尔传感器。这两个霍尔传感器的安装位置在空间上相差90°,以1对极电机为例,安装位置示意图如图1所示。
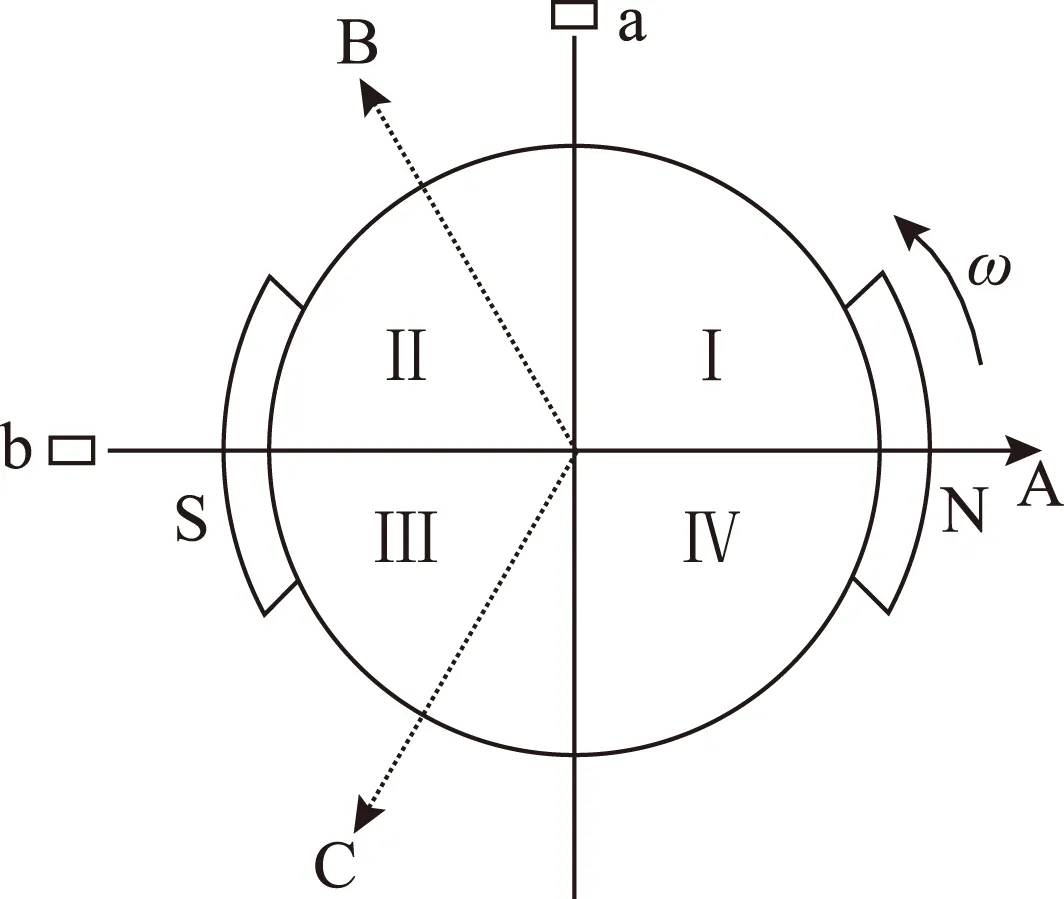
图1 两相霍尔安装位置示意图Fig.1 Mounted position of the two-phase hall sensor
当转子转动时,霍尔传感器输出的位置信号为相位相差90°、脉冲宽度为180°的方波,这些信号把360°电角度划分为4个90°的霍尔区间,图2给出了三相绕组反电动势与两相正交霍尔信号的关系。

图2 两相霍尔信号与三相绕组反电动势的对应关系Fig.2 The relationship between signals of the two-phase hall sensor and back EMF of three phase winding
表1为霍尔状态与霍尔区间的对应关系。根据两相霍尔信号的时序关系,当电机连续运行时,检测霍尔信号的状态变化,可以准确判断出电机转子所处的位置区间和旋转方向。例如:当霍尔状态{Ha、Hb}由10状态转变为11状态时,可以确定电机为正向旋转,并且进入0°~90°电角度区间,确定好电角度区间后,就可以估算出具体的电角度位置。
设相邻霍尔信号状态变化的时间间隔为Tθ(即一个霍尔区间维持的时间),则在此霍尔区间内电机的平均电角速度ωe为

(1)表1 霍尔状态与区间对应关系Tab.1 The corresponding relationships between Hall sensor states and the sections
电机稳态旋转时每个霍尔状态的角速度近似相等,电机处于动态运行时,相邻霍尔区间的平均转速也近似相等,如果采样频率和角度分辨率都足够高,则可以认为相邻霍尔区间的角速度相等,因此用上一霍尔区间的平均角速度作为当前区间的运行速度,就能估算出当前的电机转子位置角θ。以1对极电机为例,设PWM周期为TPWM,在一个霍尔区间内,转子转动π/2 rad,则可以计算出每个PWM周期的转子角度变化量Fdpp为πTPWM/(2Tθ),在每次矢量控制算法执行时在上一次角度θold的基础上对这个角度变化量进行积分,就可以实时估算出转子位置角度θ,即
(2)
得到式(2)的位置角度后,还需要保证θ不能脱离相应的霍尔区间,如果转子位置确定在第二象限范围内,θ取值范围为90°~180°,估算的角度θ不能超出该范围。
电机在低速起动或转速特别低时,霍尔信号不够稳定,此时若采用上述的电角度估算方法则会带来较大误差,通常认为转子角度变化量很小,近似为零,因此,只在霍尔状态改变时,更新一次电角度值,即在同一霍尔区间转子角度采用同一值,其赋值根据表1的起始角度确定。
电机在低速加重载起动或转速突然下降特别快而导致电机堵转时的处理方法与电机初始起动时类似。
1.2位置估算方法的数字化实现
本文选用STM32F103RC作为系统的主控芯片,由于STM32只能处理数字信号,因此要把实际的电角度量化,即把它用一组二进制代码来表示。用2个字节即16位来表示电机的电角度,利用-32 768~32 767表示电角度-π~π,电角度与16位有符号格式数据(s16)的对应关系如图3所示。
根据图3所示的比例关系可以得到电机正常运行和起动时的区间初始角赋值见表2。电机正常运行时,为了保证转子转角计算结果不超出所在霍尔区间的临界值,必须对估算结果进行判断。例如当电机正向旋转时,当前霍尔状态为10,转子转角的估算结果大于90°,则在进入下一个霍尔状态00时,控制器自动取该区间的最小值以减小误差。在电机起动时,不知道转子的准确位置,需要获得一个大致的电角度值,因此起动时以霍尔区间的中间位置作为初始位置,使最大误差控制在±45°之内。
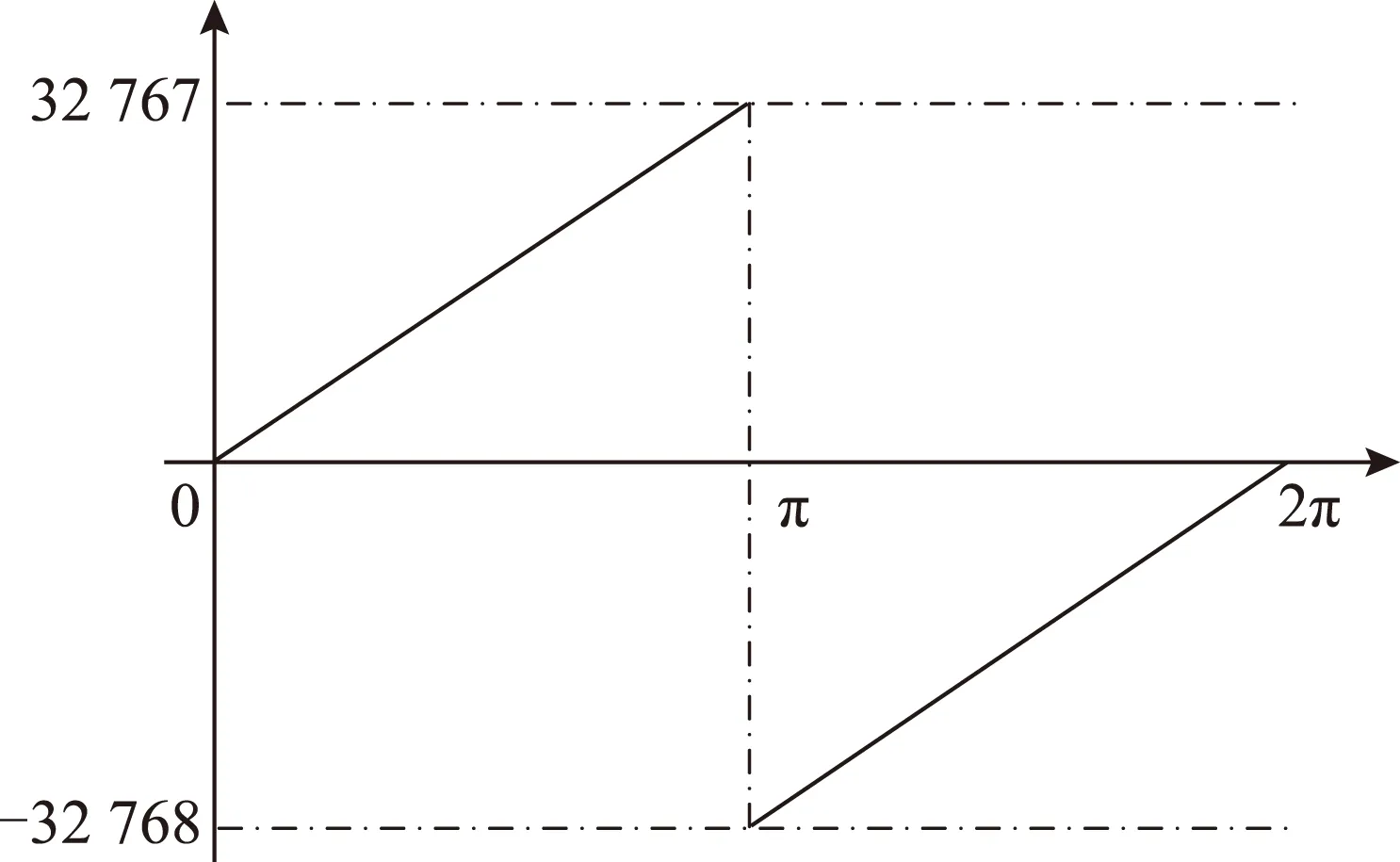
图3 电角度与s16格式数据对应关系Fig.3 The corresponding relationships between electrical angle and s16 format data表2 区间初始角赋值表Tab.2 Initial point assignment table

霍尔位置区间(正转/反转)11/1001/0000/0110/11区间初始角/(°)电机稳态运行01638432767-16384电机起动或堵转819224565-8192-24575
在处理霍尔信号时,捕获两相方波的上升沿或下降沿会增加算法的复杂度,而STM32的通用定时器配有霍尔传感器接口,该接口可以配置为异或输入模式。因此,STM32的定时器在采集两路霍尔信号到输入捕捉逻辑模块之前先对霍尔信号做异或处理,其霍尔信号与异或信号波形如图4所示。

图4 霍尔状态与异或结果Fig.4 Hall states with their XOR result
转子速度的测量转换为异或后方波信号周期的测量,异或后方波信号相当于实际转子频率的2倍频。然而转子方向的测量仍需根据两个霍尔信号的状态来判定。设系统时钟频率为CKTIM,定时计数器的预分频值为prescaler value,则计数器的计数频率为CKTIM/prescaler value,因此异或后波形的频率为CKTIM/(2×captured value×prescaler value),因此可以得出转子频率的计算公式为
(3)
式中,p为电机极对数;captured value为定时器中断时捕获的值。转子在每个PWM周期内电角度变化量的计算公式为
(4)
计算电角度θ时,在每次矢量控制算法执行时,更新转子电角度,同步仅需要对Fdpp进行积分。
为了提高测量准确度,定时器的预分频器须根据中断捕获值进行不断调整,如图5所示。若计数值太小,预分频器(为预装载寄存器)被减小;相反,若计数器值上溢,预分频器(为预装载寄存器)被增大。由于预分频器寄存器为预装载的,其新的值仅在下一个捕获事件时起作用,这样不会干扰当前捕获的测量值。

图5 预分频器值变化时计数器的时序图Fig.5 Timing diagram when prescaler changes
本文将通用定时器2配置为霍尔输入接口,对异或后方波信号的边沿进行检测,异或信号的上升沿或下降沿作为中断源触发定时器的捕获中断,霍尔转子位置估算算法流程如图6所示。

图6 霍尔转子位置估算算法流程Fig.6 Algorithm flowchart for estimation of all sensor positions
2 位置估算误差分析
位置估算误差主要由原理误差和固有误差构成。原理误差是由位置估算方法引起的,包括稳态误差和动态误差;而固有误差是由霍尔传感器安装不正交或磁极安装不对称引起的,属于机械误差。以下分别对其进行分析。
2.1原理误差分析
从原理上讲,位置估算原理性误差包括稳态误差和动态误差两部分。
设电机角速度保持恒定ω*,相邻两次霍尔位置信号变化的间隔时间为(1/p)·π/(2ω*), 则稳态预估误差最大值为
=3pTsn*(电角度)
(5)
式中,Ts为霍尔信号采样周期;n*为电机恒定转速。从式(5)可以看出稳态估算误差最大值与转速、极对数及采样周期呈正比。对于极对数p=8,当采样周期
为10 μs,n*= 1 000 r/min时,稳态估算误差最大值为0.24°。
假设电机稳速运行时,在理想情况下,估算位置与实际位置一致,两者之间不会存在动态误差。但电机在加速或减速过程中,估算位置θD与实际位置θ存在动态误差。动态估算误差Δθ=θ-θD,可由以下计算得到。
如图7所示,设电机以恒定角加速度(A=C)加速运行时,则有
ω=ω0+At
(6)
式中,ω为区间(t0,tb)内任意一点的角速度;ω0为t0时刻的角速度。

图7 匀加速过程中速度和位置与时间关系曲线Fig.7 Curve of speed,position and time in equally accelerating process
于是可得到电机的实际位置为
(7)式中,θ0为t=t0时刻的实际转子位置。因为θ(ta)= -π/2,θ(ta)= π/2,由式(7)可得
(8)
位置估算值为
(9)
式中,ωa为t= (ta+t0)/2时刻的角速度。当t=tb时,动态误差有最大值为
(10)
由式(10)可知,估算位置最大动态误差与电机转速和加速度有关,误差随转速的下降和加速度的升高而增大。
2.2固有误差分析
假设两相霍尔信号正交偏离的角度为Δθ,如图8所示(此时假设电机磁极安装是对称的,仅存在霍尔安装误差),电机以电角速度ω稳速运行,下面对由两相开关霍尔信号不正交所产生的误差进行分析。
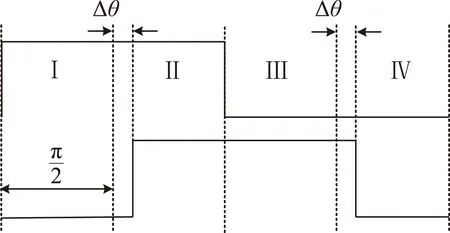
图8 两相不正交霍尔信号Fig.8 Quadrature error of the hall signals
由图8可知,区间Ⅰ的实际宽度为π/2+Δθ,电机在区间I 的运行时间为
(11)
由式(11)可以得到区间Ⅰ的平均电角速度为
(12)
区间Ⅱ的实际宽度为π/2-Δθ,电机在区间Ⅱ的运行时间为
(13)
位置预估算法中是选取区间Ⅰ的平均速度作为区间Ⅱ的速度,即有ωe2=ωa1,则区间Ⅱ由于霍尔信号不正交所产生的最大位置估算误差可表示为
(14)
对其余3个区间可采用同样的分析方法,于是可得到由于霍尔信号不正交而在各霍尔区间产生的位置估算误差见表3。

表3 霍尔信号不正交导致的估算位置误差Tab.3 Estimated position error caused by quadrature error of the hall signals
3 实验结果
采用图9的矢量控制方式,在1 kW永磁同步电机上进行试验,采用磁滞测功机对电机进行加载。本文搭建的实验平台如图10所示。实验采用的永磁同步电机参数为:额定功率1 kW,额定电流1.5 A,额定电压220 V,额定转速1 000 r/min,极对数为8,正交霍尔传感器电源电压为5 V,通电后,A相霍尔信号Ha和B相霍尔信号Hb与A相反电动势ea之间的对应关系如图11所示。由图11可以看出A相反电动势由负到正的过零点对应于A相霍尔信号上升沿,A相霍尔信号与B相霍尔信号相位相差90°。

图9 永磁同步电机矢量控制系统框图Fig.9 Scheme of PMSM vector control system

图10 实验平台Fig.10 The experiment platform
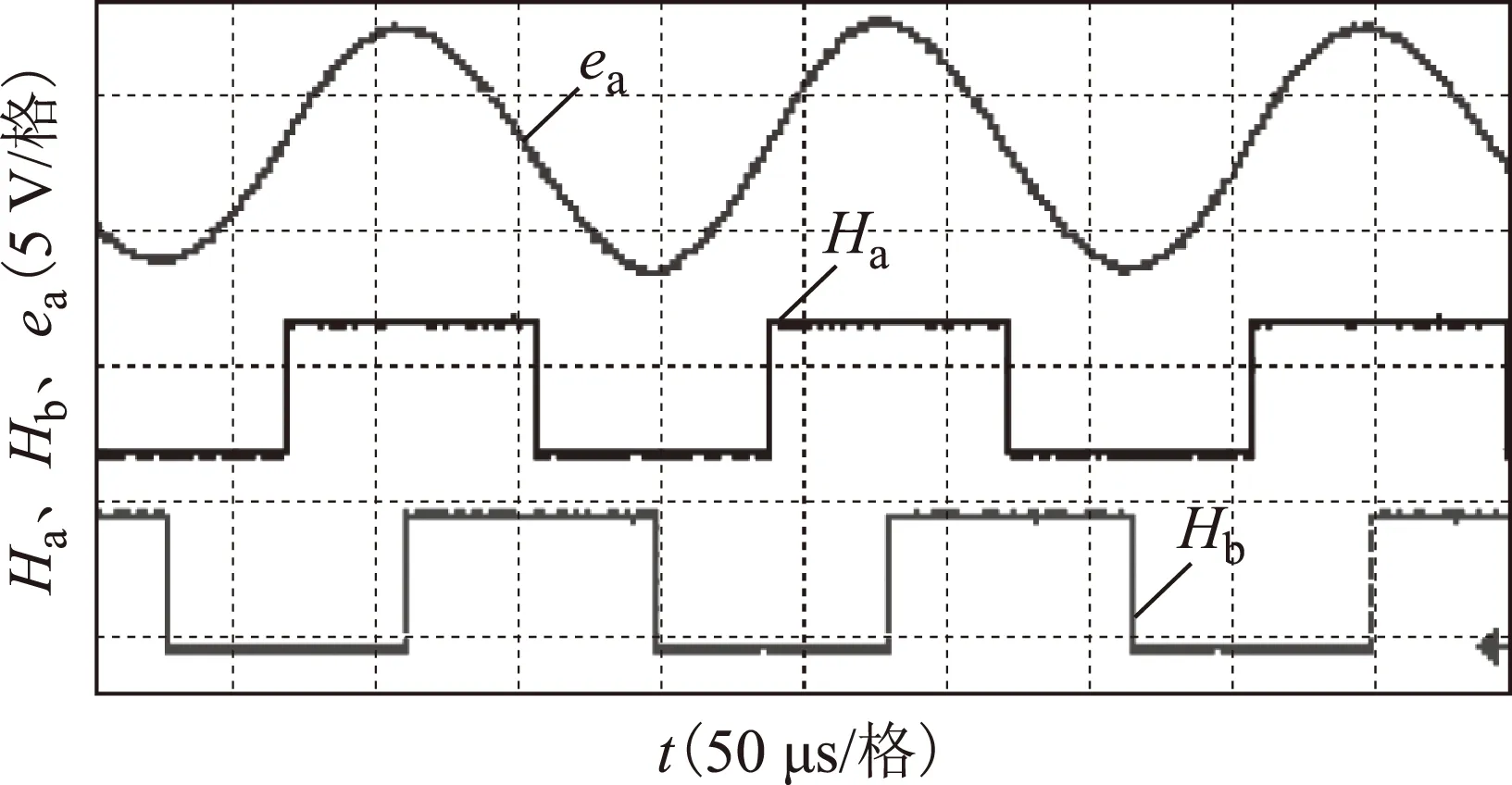
图11 两相霍尔信号与A相反电动势关系Fig.11 The relationship between two-phase hall signals and back EMF of phase A
图12为电机运行于转速为500 r/min,负载转矩为10 N·m的实验结果,图中的波形由上至下分别为:A相霍尔信号Ha、B相霍尔信号Hb、电角度估算值θD、A相绕组电流波形ia。实验波形图中θD0~3 V对应实际电角度0~2π。
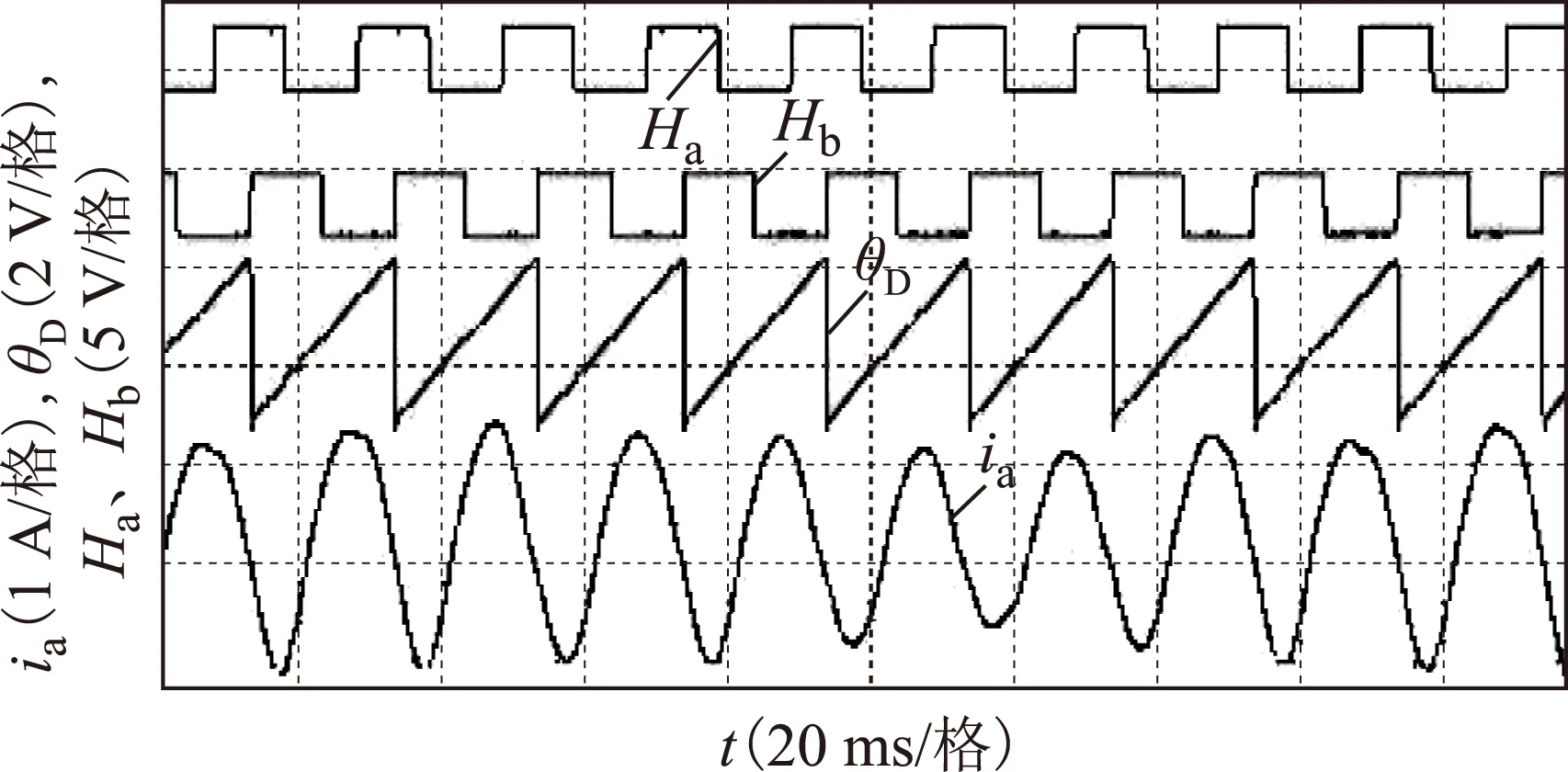
图12 500 r/min、10 N·m负载下的实验波形Fig.12 Waveforms under 500 r/min with 10 N·m load
图13为电机运行于转换为1 000 r/min时突加和突减10 N·m阶跃负载转矩的实验结果,图中波形分别为:转速实际值n、A相绕组电流波形ia、电角度估算值θD。可以看出转速在发生扰动时有一定的变化,但很快恢复稳定。
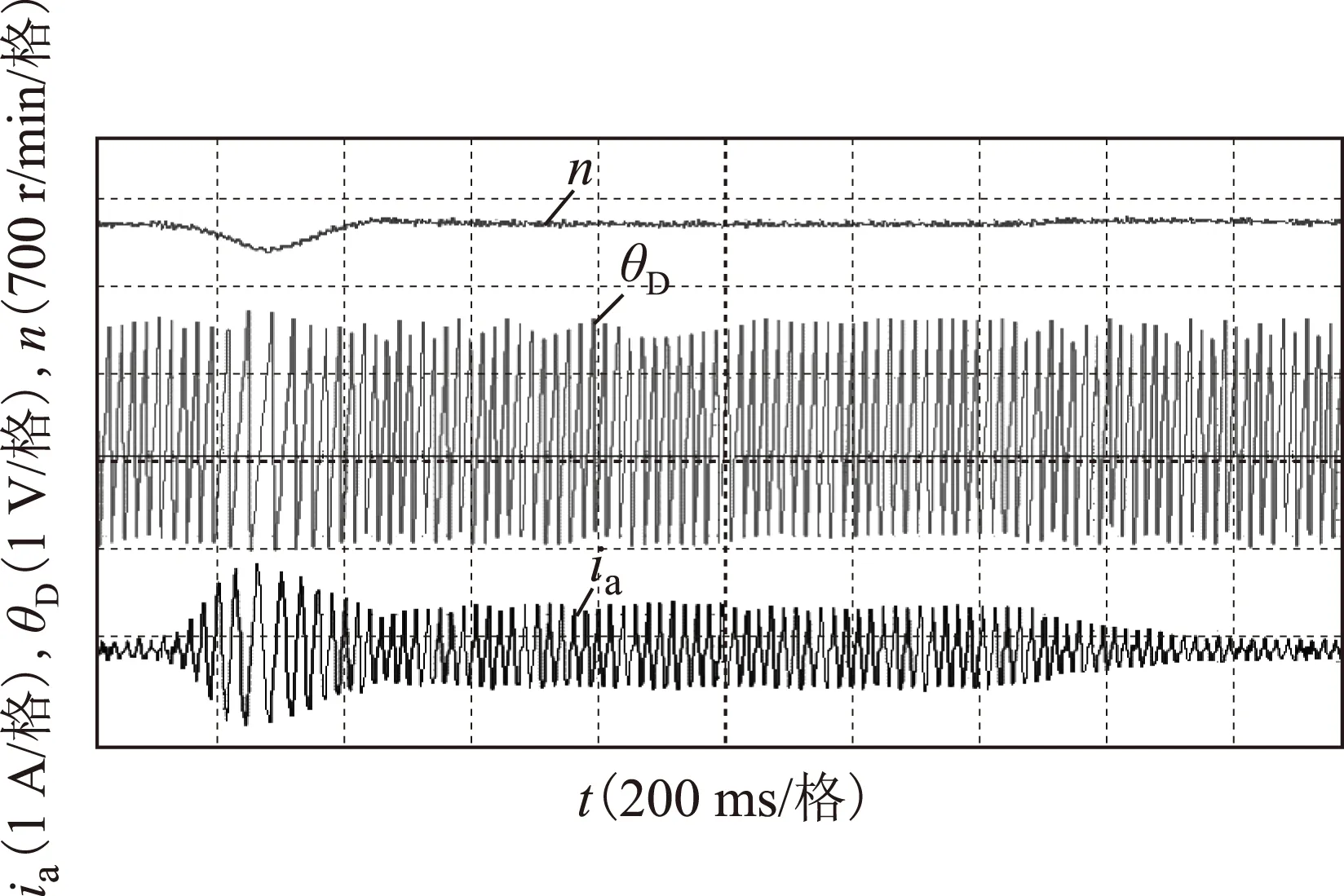
图13 1 000 r/min、10 N·m负载扰动实验波形Fig.13 Waveforms at 1 000 r/min with 10 N·m load disturbance
图14为电机空载时以转速500 r/min正反转运行实验结果。

图14 500 r/min空载时正反转实验波形Fig.14 Waveforms under 500 r/min with no load
为了验证霍尔位置估算算法的准确性,在软件中人为给定频率为14 Hz(周期为71.4 ms)并按锯齿波规律变化的电角度信号,采用电压空间矢量调制方式使之产生周期为71.4 ms的PWM波信号驱动三相桥式逆变器,逆变之后的电压信号使电机匀速运行,测试出估算出来的电角度θD与给定电角度θref的实验波形如图15所示。

图15 在给定电角度信号下的实验波形Fig.15 Waveforms in a given electrical angle signal
图15a中估算的电角度波形放大后如图16所示。从图中可以看出,估算出来的电角度波形与给定电角度波形基本吻合,只是在每个霍尔状态跳变时的电角度值不够平滑,每个霍尔周期对应的电角度波形也不是完全相同。

图16 估算电角度波形Fig.16 Waveforms of estimated electrical angle
由于实验所用电机极对数为8对极,为了排除霍尔安装不正交或磁极不对称对霍尔估算带来的影响,测试了图12中的A相霍尔信号Ha上升沿与B相霍尔信号Hb上升沿之间的相位,基本上在89.7°~91.3°之间;图15中A相霍尔信号Ha高电平所占霍尔周期的比例不是50%,但是基本保持在49.6%~52.3%之间。由此可以看出实验所用电机霍尔安装不是严格正交的,磁极安装不完全均匀,硬件安装问题导致图12中电流波形幅值忽大忽小以及图16中电角度波形不够平滑。因此,采用两相正交型开关霍尔传感器对转子位置进行估算对霍尔的正交性要求较高。当霍尔安装不正交带来的误差较大时,需要加其他校正算法使估算出来的电角度波形接近理想的锯齿波形。
4 结论
本文设计了一种基于两相正交型开关霍尔对转子位置检测的方法,对霍尔位置估算方法引起的原理误差和霍尔安装不正交引起的固有误差进行了分析,最后在STM32微控制器上完成了转子位置检测的软件设计,采用矢量控制方法对转子位置检测算法进行了实验验证。经过理论分析与实验测试,可以得出:采用两相正交型霍尔传感器进行转子位置检测,可以得到较好的位置准确度,在一些对电机性能要求不高而对成本要求苛刻的场合下是一个不错的选择。
[1]Dutta R,Rahman M F.Design and analysis of an interior permanent magnet(IPM) machine with very wide constant power operation range[J].IEEE Transactions on Energy Conversion,2008,23(1):25-33.
[2]黄腾云,姜淑忠,李小海.采用霍尔传感器的PMSM低成本控制系统[J].微特电机,2012,40(1):19-21.
Huang Tengyun,Jiang Shuzhong,Li Xiaomei.Low cost PMSM control system using hall sensors[J].Micro motor,2012,40(1):19-21.
[3]王高林,杨荣峰,李刚,等.基于高频信号注入的IPMSM无位置传感器控制策略[J].电工技术学报,2012,27(11):62-68.
Wang Gaolin,Yang Rongfeng,Li Gang,et al.Position sensorless control strategy of IPMSM based on high frequency signal injection[J].Transactions of China Electrotechnical Society,2012,27(11):62-68.
[4]李志强,夏长亮,陈炜.基于线反动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):38-44.
Li Zhiqiang,Xia Changliang,Chen Wei.A position sensorless control strategy for BLDCM based on line back-EMF[J].Transactions of China Electrotechnical Society,2010,25(7):38-44.
[5]蔡骏,邓智泉.基于全周期电感法的开关磁阻电机无位置传感器控制技术[J].电工技术学报,2013,28(2):145-154.
Cai Jun,Deng Zhiquan.Sensorless control of switched reluctance motors based on full-cycle inductance method[J].Transactions of China Electrotechnical Society,2013,28(2):145-154.
[6]李珍国,李彩红,阚志忠,等.基于改进型简化磁链法的开关磁阻电机无位置传感器速度控制[J].电工技术学报,2011,26(6):62-66.
Li Zhenguo,Li Caihong,Kan Zhizhong,et al.Switched reluctance motor sensorless speed control based on the improved simplified flux method[J].Transactions of China Electrotechnical Society,2011,26(6):62-66.
[7]黄进,赵力航,刘赫.基于二阶滑模与定子电阻自适应的转子磁链观测器及其无速度传感器应用[J].电工技术学报,2013,28(11):54-61.
Huang Jin,Zhao Lihang,Liu He.Sensorless control with resistance variation approach based on parallel MRAS and second-order sliding mode observer[J].Transactions of China Electrotechnical Society,2013,28(11):54-61.
[8]刘英培,万健如,沈虹,等.基于EKF PMSM定子磁链和转速观测直接转矩控制[J].电工技术学报,2009,24(12):57-62.
Liu Yingpei,Wan Jianru,Shen Hong,et al.Stator flux linkage and rotor speed observation for PMSM DTC based on EKF[J].Transactions of China Electrotechnical Society,2009,24(12):57-62.
[9]王大方,刘智祺,金毅,等.基于反电动势积分法的无位置传感器直流无刷电机试探性起动研究[J].电工技术学报,2012,27(12):178-184.
Wang Dafang,Liu Zhiqi,Jin Yi,et al.Tentative strategy of starting sensorless BLDCM with the mothod of integrating the back EMF[J].Transactions of China Electrotechnical Society,2012,27(12):178-184.
[10]金宁治.基于FPGA的PMSM简易正弦驱动控制的研究[D].哈尔滨:哈尔滨理工大学,2006.
[11]倪攀.洗衣机用PMSM控制系统的研究[D].上海:上海交通大学,2012.
[12]吕得刚,李铁才,杨贵杰.无刷直流电动机集成霍尔传感器[J].电工技术学报,2008,23(2):31-36.
Lü Degang,Li Tiecai,Yang Guijie.Integrated hall sensor for brushless DC motor[J].Transactions of China Electrotechnical Society,2008,23(2):31-36.
[13]Bu Jianrong,Xu Longya.Near-zero speed performance enhancement of PM synchronous machines assisted by low-cost Hall effect sensors[J].Applied Power Electronics Conference and Exposition,1998,31(1):64-68.
[14]郭清风.永磁同步电机磁极位置检测技术的研究[D].哈尔滨:哈尔滨工业大学,2007.
[15]周兆勇,徐征,李铁才.基于两相正交开关霍尔传感器的混合型转子位置预估方案的FPGA实现[J].电工技术学报,2004,19(1):61-64.
Zhou Zhaoyong,Xu Zheng,Li Tiecai.FPGA implementation of a new hybrid rotor position estimation scheme based on two orthogonal locked hall effect position sensors[J].Transactions of China Electrotechnical Society,2004,19(1):61-64.
[16]梁迎春,吴海涛,林益平.基于FPGA新型位置预估算法的实现方案[J].微特电机,2007,35(10):18-20,23.
Liang Yingchun,Wu Haitao,Lin Yiping.An implementation scheme of new position estimation based on FPGA[J].Micro Motor,2007,35(10):18-20,23.
Research on Rotor Position Estimation Scheme Based on Two Phase Orthogonal Hall Effect Position Sensors
Xun Qian1Qin Haihong1Li Hansong2Nie Xin1Zeng Qingxi3
(1.Jiangsu Key Laboratory of New Energy Generation and Power Conversion Nanjing University of Aeronautics and AstronauticsNanjing210016China 2.College of Mechanical and Electrical EngineeringNanjing University of Aeronautics and Astronautics Nanjing210016China 3.College of Energy & Power EngineeringNanjing University of Aeronautics and Astronautics Nanjing210016China)
In order to expand applications of permanent magnet synchronous motors (PMSM) in low cost electric drive systems,based on the analysis of hall position estimation principle,a design scheme for rotor position estimation of PMSM using two orthogonal locked hall effect position sensors is presented.The principle errors and the fixed errors caused by hardware installation are analyzed in this paper.Finally,the rotor position detection software design and the closed loop control of PMSM are realized on a STM32 micro controller.All experimental results show that two phase orthogonal hall position sensors for rotor position detection can obtain better position accuracy,has high performance price ratio,and can be applied in the motor control on the occasions of cost demanding.
Low cost electric drive,two orthogonal hall,rotor position estimation,error analysis
2014-04-15改稿日期2015-05-20
TM351
荀倩女,1990年生,硕士研究生,研究方向为电力电子与电力传动。
E-mail:XQ09086320@163.com
秦海鸿男,1977年生,博士,副教授,研究方向为碳化硅功率器件应用技术、功率变换技术、电机控制。
E-mail:qinhaihong@nuaa.edu.cn(通信作者)
教育部博士点基金(20123218120017)、江苏省新能源发电与电能变换重点实验室开放基金(ZAB11002-14)和江苏省高校优秀科技创新团队项目资助。
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03 03:32:40
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:48
防爆电机(2020年6期)2020-12-14 07:16:54
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
光学精密工程(2016年3期)2016-11-07 09:03:49
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:48
太空探索(2015年6期)2015-07-12 12:48:42
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
世界科学(2013年6期)2013-03-11 18:09:39